КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
При решении конкретных задач
Применение основных законов динамики твердого тела
При решении конкретных задач, связанных с описанием движения твердого тела, следует помнить, что твердое тело в механике представляет собой частный случай системы материальных точек, имеющих в процессе рассматриваемого движения неизменное друг относительно друга взаимное расположение. Как уже указывалось (3.7) и (3.3), в этом случае справедливы основные уравнения динамики
 (4.25)
(4.25)
и
 . (4.26)
. (4.26)
Из этих уравнений непосредственно видно, что характер движения твердого тела полностью определяется действующими на него внешними силами  и моментами этих сил
и моментами этих сил  .
.
Для практического применения основных уравнений (4.2) и (4.26) полезно следовать рекомендациям, упрощающим решение конкретных задач:
- Сделать схематический чертеж, на котором указать все внешние силы, действующие на рассматриваемое тело. При этом силы следует изображать в тех точках тела, на которые эти силы действуют.
- Выбрать инерциальную систему отсчета, связанную с какой-либо неподвижной или движущейся равномерно и прямолинейно точкой, относительно которой определяются моменты внешних сил. Если тело имеет неподвижную ось вращения, то полезно эту точку выбрать на неподвижной оси, а ось 0Z декартовой системы координат направить вдоль оси вращения. В случае плоского движения твердого тела ось 0Z рекомендуется направить перпендикулярно плоскости, в которой лежит траектория какой-либо точки тела.
- Точку приложения конкретной силы можно перемещать вдоль линии действия силы, так как при этом момент этой силы не изменяется. Это полезно делать при необходимости определения равнодействующей внешних сил.
- Записать уравнения (4.25) и (4.26) в проекциях на оси координат выбранной системы отсчета и, с использованием уравнений связи (например,  ) и дополнительных условий задачи, решить полученную систему уравнений относительно искомой величины.
) и дополнительных условий задачи, решить полученную систему уравнений относительно искомой величины.
Рис. 4.6 |
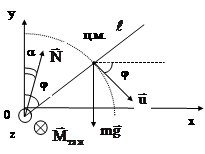
Для примера подробно исследуем свободное вращение жесткого однородного стержня массой  и длиной
и длиной  в вертикальной плоскости относительно горизонтальной оси, проходящей через один из его концов (рис. 4.6). Трением в оси пренебрегаем. Выберем оси координат, как указано на рис. 4.6 (ось Z направлена из-за чертежа вдоль оси вращения стержня). При свободном вращении на стержень действуют две силы: сила тяжести
в вертикальной плоскости относительно горизонтальной оси, проходящей через один из его концов (рис. 4.6). Трением в оси пренебрегаем. Выберем оси координат, как указано на рис. 4.6 (ось Z направлена из-за чертежа вдоль оси вращения стержня). При свободном вращении на стержень действуют две силы: сила тяжести  и реакция оси вращения
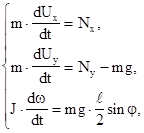
и реакция оси вращения  . Поэтому уравнения динамики (4.25) и (4.26) примут вид
. Поэтому уравнения динамики (4.25) и (4.26) примут вид
 ,
,
 ,
,
где  и
и  - моменты сил и
- моменты сил и  соответственно. Запишем эти уравнения в проекциях на выбранные оси координат
соответственно. Запишем эти уравнения в проекциях на выбранные оси координат

где угол  отсчитывается от оси
отсчитывается от оси  .
.
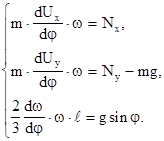
В уравнении (4.29) учтено, что  относительно оси вращения равен нулю. Исследование удобнее и проще всего проводить, если перейти в уравнениях (4.27)-(4.29) от переменной
относительно оси вращения равен нулю. Исследование удобнее и проще всего проводить, если перейти в уравнениях (4.27)-(4.29) от переменной  к переменной . Заметим, что в этом случае
к переменной . Заметим, что в этом случае  , кроме этого, учтем, что
, кроме этого, учтем, что  относительно оси вращения, согласно (4.13). Теперь уравнения (4.27)-(4.29) примут вид:
относительно оси вращения, согласно (4.13). Теперь уравнения (4.27)-(4.29) примут вид:

Легко заметить, что последнее равенство (4.32) эквивалентно условию
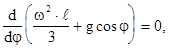
что проверяется прямым дифференцированием. Равенство нулю производной означает, что сумма в скобках при вращении стержня остается постоянной, то есть
Значение константы определим, положив, например,  при
при  , что соответствует началу вращения стержня из вертикального положения без толчка. В этом случае
, что соответствует началу вращения стержня из вертикального положения без толчка. В этом случае  , поэтому
, поэтому  , при заданных начальных условиях
, при заданных начальных условиях  . Поэтому значение угловой скорости стержня в любом его положении определяется равенством
. Поэтому значение угловой скорости стержня в любом его положении определяется равенством
 . (4.33)
. (4.33)
Используя связь (1.31), найдем теперь значения модуля скорости центра масс стержня
 , (4.34)
, (4.34)
а затем и проекций  на оси координат
на оси координат
 (4.35)
(4.35)
 (4.36)
(4.36)
Уравнения (4.30) и (4.31) позволяют определить проекции силы , для этого необходимо, соответственно, использовать (4.35) и (4.36):
 , (4.37)
, (4.37)
 . (4.38)
. (4.38)
Интересно отметить, что при вращении сила , вообще говоря, не направлена вдоль стержня, а составляет с вертикалью (с осью 0Y) угол
 . (3.39)
. (3.39)
Модуль силы равен
 (4.40)
(4.40)
и нигде в нуль не обращается.
Выводы: Свободное вращение стержня в вертикальной плоскости является неравномерным. Зависимости угловой скорости вращения, скорости его центра масс, а также реакции оси от положения стержня определяются формулами (4.33)-(4.40).
Контрольные вопросы.
4.9. Покажите, что равенство (4.33) является следствием из закона сохранения механической энергии стержня.
4.10. Определите, в каких положениях стержня (-?) реакция его оси направлена а) горизонтально; б) вертикально; в) вдоль стержня?
Рис. 4.7 Рис. 4.8 |
4.8. 

 Понятие о прецессии
Понятие о прецессии
 |
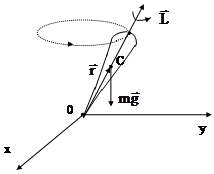
Рассмотрим здесь качественно характер движения симметричного твердого тела, имеющего одну неподвижную точку 0 (рис. 4.7), которая лежит на оси симметрии тела  . В динамике вращательного движения такое тело называется гироскопом или симметричным волчком. Примером такого тела является обыкновенный детский волчок (юла). Поставим волчок на горизонтальную опору и приведем его в быстрое вращение относительно оси симметрии , в результате волчок приобретет момент импульса
. В динамике вращательного движения такое тело называется гироскопом или симметричным волчком. Примером такого тела является обыкновенный детский волчок (юла). Поставим волчок на горизонтальную опору и приведем его в быстрое вращение относительно оси симметрии , в результате волчок приобретет момент импульса  , направленный вдоль оси .
, направленный вдоль оси .
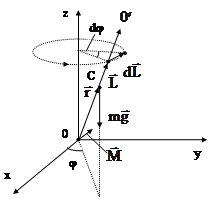
Дальнейшее движение волчка будет определяться результирующим моментом сил, действующих на волчок относительно неподвижной точки  , который равен
, который равен

и направлен перпендикулярно плоскости  (рис. 4.8). Заметим, что момент силы реакции опоры относительно точки равен нулю.
(рис. 4.8). Заметим, что момент силы реакции опоры относительно точки равен нулю.
Из-за действия момента силы тяжести  , в соответствии с уравнением моментов (3.52), за время
, в соответствии с уравнением моментов (3.52), за время  момент импульса волчка получит приращение
момент импульса волчка получит приращение  , равное
, равное
 .
.
Отметим, что  , а поэтому приращение направлено перпендикулярно плоскости . Таким образом, ось волчка за время повернется в направлении на некоторый угол
, а поэтому приращение направлено перпендикулярно плоскости . Таким образом, ось волчка за время повернется в направлении на некоторый угол  . Поскольку взаимная ориентация векторов , и плоскости в любой момент времени остается неизменной, то ось вращения волчка будет поворачиваться относительно вертикали
. Поскольку взаимная ориентация векторов , и плоскости в любой момент времени остается неизменной, то ось вращения волчка будет поворачиваться относительно вертикали  , описывая конусообразную поверхность.
, описывая конусообразную поверхность.
Подобный характер движения будет наблюдаться, когда симметричное твердое тело, имеющее одну неподвижную точку и вращающееся вокруг оси симметрии, подвержено действию постоянного по величине внешнего момента силы. При этом его ось вращения сама поворачивается относительно неподвижной оси - такое вращение называется прецессией.
Особое распространение в технике получили так называемые уравновешенные гироскопы, когда неподвижной точкой при вращении гироскопа является его центр инерции, а собственная ось вращения гироскопа может свободно поворачиваться в любом из трех взаимно перпендикулярных направлений. Таким образом, собственная ось вращения гироскопа является свободной. Это достигается с помощью так называемого карданова подвеса (рис. 4.9), в котором оси внешнего  и внутреннего
и внутреннего  колец и собственная ось гироскопа
колец и собственная ось гироскопа  пересекаются в одной точке: центре подвеса. Уравновешенные гироскопы являются основным элементом автоматического управления в навигационных приборах движущихся объектов (самолетов, кораблей, ракет и т.д.), а также используются в приборах для измерения угловых и линейных скоростей. Действие подобных приборов основано на главном свойстве гироскопа: при любых поворотах оси внешнего кольца,
пересекаются в одной точке: центре подвеса. Уравновешенные гироскопы являются основным элементом автоматического управления в навигационных приборах движущихся объектов (самолетов, кораблей, ракет и т.д.), а также используются в приборах для измерения угловых и линейных скоростей. Действие подобных приборов основано на главном свойстве гироскопа: при любых поворотах оси внешнего кольца,
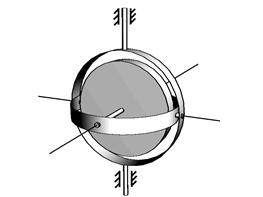
Рис. 4.9 |
неподвижной относительно движущегося объекта (например, самолета), собственная ось вращения гироскопа  не изменяет своей ориентации в пространстве. Это свойство непосредственно следует из закона сохранения момента импульса.
не изменяет своей ориентации в пространстве. Это свойство непосредственно следует из закона сохранения момента импульса.
|
|
Дата добавления: 2014-01-07; Просмотров: 649; Нарушение авторских прав?; Мы поможем в написании вашей работы!