КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Точность работы САУ в установившемся режиме
|
|
|
|
Лекция 20
В общем случае на САУ оказывают влияние задающее воздействие v(t), возмущающее воздействие f(t) и шум измерения s(t). При этом изображение по Лапласу у(р) выходной величины y(t) линейной системы может быть записано в виде
y(p)=Ф(p)v(p)+Фf(p)f(p)+Фs(p)s(p), (1)
где
Ф(р) – передаточная функция замкнутой системы,
Фf(p) – передаточная функция по возмущению f(p)=L{f(t)},
Фs(p) – передаточная функция по шуму измерения s(p)=L{s(t)},
v(p)=L{v(t)} - изображение по Лапласу задающего воздействия v(t).
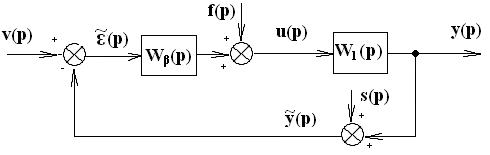
Заметим, что для системы с одной степенью свободы (см. рисунок ниже) у(р) можно выразить как
y(p)=T(p)[v(p) - s(p)]+ W1(p)S(p)f(p),
используя передаточную функцию объекта W1(p), функцию чувствительности S(p) и дополнительную функцию чувствительности T(p).
Задачей САУ является обеспечение в любой момент времени равенства величин: y(t)=v(t). Однако реальная система выполняет эту задачу с некоторой ошибкой
εп(t)=v(t) -y(t) (2)
равной разности между заданным v(t) и действительным y(t) значениями управляемой величины. Изображение по Лапласу этой ошибки с учетом (1) равно
εп(р)=v(p)-y(p)= ε(p)+ εf(p)+ εs(p), (3)
где
ε(p)=[1-Ф(p)]v(p), (4)
εf(p)=-Фf(p)f(p), (5)
εs(p)=-Фs(p)s(p). (5,а)
Для системы с одной степенью свободы
ε(p)=S(p)v(p),
εf(p)= -W1(p)S(p)f(p),
εs(p)=-T(p)s(p),
и полная ошибка
εп(р)= S(p)v(p) - W1(p)S(p)f(p)+ T(p)s(p)
зависит от функции чувствительности S(p) и дополнительной функции чувствительности S(p).
· Для хорошего воспроизведения сигнала v ( обычно низкочастотного ) требуется
| S(j )| было малым
)| было малым  0
0 .
.
· Для снижения влияния шума измерения (шума датчика) s ( обычно высокочастотного) требуется
|T(j)| было малым  .
.
Т.к. T(p)+ S(p)=1 p, то мы не можем сделать так, чтобы обе T(p) и S(p) были малыми на тех же самых (одинаковых частотах) (см. рисунок ниже).
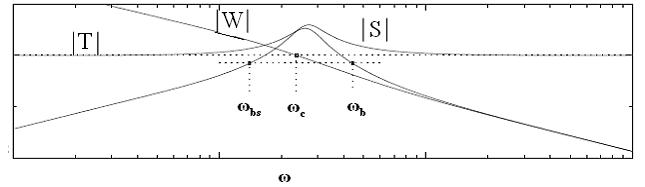
Это обстоятельство является фундаментальным ограничением при проектировании системы.
Таким образом, ошибка системы состоит из трех составляющих
εп(t)= ε(t)+ εf(t)+ εs(t), (6)
первая из которых ε(t)=L-1[ε(p)] называется ошибкой воспроизведения, вторая εf(t)=L-1[εf(p)] - ошибкой по возмущению, а третья εs(t)=L-1[εs(p)] – ошибкой по шуму измерения.
Ошибка воспроизведения показывает, как точно воспроизводит данная система задающее воздействие v(t) в отсутствие других внешних воздействий (f=s=0). Величина этой ошибки определяется инерционностью системы и видом задающего воздействия v(t).
Ошибки по возмущению и шуму измерения соответственно показывают, как влияют на управляемую величину возмущение и шум измерения при задающем воздействии v(t), равном нулю. Такое разделение ошибки на три составляющие возможно лишь в линейных системах, для которых справедлив принцип суперпозиции.
Выражение (6) для устойчивых систем определяет ошибку как в установившемся, так и в переходном режимах. Переходная составляющая ошибки обычно рассматривается при исследовании переходных процессов. Поэтому в данной главе остановимся на рассмотрении ошибки в установившемся режиме, который теоретически наступает при t→∞. Величина установившейся ошибки
(εп)уст(t)= εуст(t)+ (εf)уст(t)+ (εs)уст(t) (7)
характеризует точность работы САУ в установившемся режиме.
Рассмотрим методы вычисления установившейся ошибки воспроизведения εуст(t) и установившейся ошибки по возмущению (εf)уст(t).
Ошибка воспроизведения.
Установившееся значение ошибки воспроизведения в ряде случаев определяется с помощью известной в операционном исчислении теоремы о конечном значении, которая применительно к данному случаю может быть записана в виде
εуст=  . (8)
. (8)
Преобразование Лапласа ε(р) ошибки легко найти, если известны преобразование Лапласа v(р) входного сигнала и передаточная функция для ошибки Фε(р), связанная с передаточной функцией Ф(р) замкнутой системы соотношением
Фε(р)=1 - Ф(р). (9)
Действительно, согласно (4)
ε(р)=Фε(р)v(p). (10)
Принимая во внимание существующую для системы с одной степенью свободы связь между передаточными функциями замкнутой Ф(р) и разомкнутой W(р) систем
Ф(р)=T(p)=W(p)/(1+W(p)),
а также, что
 ,
,
на основании (9) имеем
Фε(р)=1-T(p)=S(p)= .
.
Поэтому передаточная функция по ошибке называется также функцией чувствительности.
Следовательно,
 . (11)
. (11)
Учитывая, что W0(p) обладает свойством W0(0)=1, получаем
 . (12)
. (12)
Выражение (12) имеет смысл, если ε(t) стремится к определенному пределу при t→∞. В противном случае выражение (8) неприменимо. Рассмотрим от каких факторов зависит ошибка εуст при типовых входных сигналах, для которых вышеуказанное требование соблюдается.
Входной сигнал – ступенчатая функция v ( t)=a01(t).
Операторное выражение такой функции v(p)=a0/p. При этом
 (13)
(13)
Если ν=0 (система не содержит интегрирующих звеньев), то
 (14)
(14)
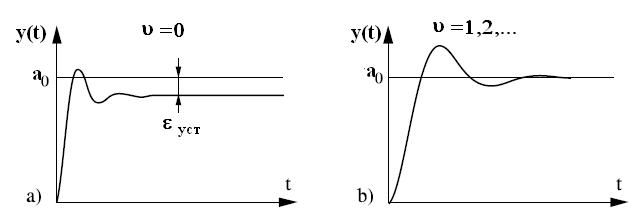
Следовательно, в такой системе, даже при постоянном входном сигнале, имеет место ошибка, называемая ошибкой по положению или статической ошибкой. Ошибка  при известном а0 определяется статизмом системы
при известном а0 определяется статизмом системы
 (15)
(15)
и она тем меньше, чем больше коэффициент усиления k ( рис. a ниже).
Системы, обладающие статической ошибкой, называются статическими системами. Коэффициент усиления k статических систем является безразмерной величиной, так как величины а0 и εуст имеют одинаковую размерность.
Отметим, что статическая ошибка, определяемая выражением (14), является принципиальной (методической) ошибкой и обусловлена принципом действия системы.
Если ν>1 (система содержит одно или несколько интегрирующих звеньев), то, как это видно из выражения (13), статическая ошибка равна нулю. Системы, обладающие нулевой статической ошибкой, называются астатическими системами (рис b ниже). При этом величина ν, как говорят, определяет порядок астатизма системы.
Астатическую систему можно рассматривать как статическую систему с бесконечно большим коэффициентом усиления k. Действительно, наличие интегрирующих звеньев приводит к тому, что при постоянном входе сигнал на выходе разомкнутой системы с течением времени растет до бесконечности.
Входной сигнал v(t)=a1t, изменяющийся с постоянной скоростью a1.
В этом случае v(p)=a1/p2, а установившаяся ошибка
 . (16)
. (16)
Если ν=0 (статическая система), то εуст=∞. Полученному результату легко дать объяснение, если учесть, что в установившемся режиме, т.е. при t→∞, на входе системы имеется бесконечно большой сигнал и поэтому при конечном коэффициенте усиления k, согласно (14), ошибка εуст равна бесконечности. Другими словами, данный случай можно рассматривать как предыдущий при v(t)=a0, если положить a0=∞.
Если ν=1 (система с астатизмом первого порядка), то
 . (17)
. (17)
При этом ошибка εуст обратно пропорциональна коэффициенту усиления и носит название скоростной ошибки. Так как входной сигнал v и ошибка ε имеют одинаковую размерность, то коэффициент усиления системы с астатизмом первого порядка имеет размерность [сек-1] и характеризует установившуюся скорость изменения выходной величины разомкнутой системы при постоянном входном сигнале.
Физический смысл полученного результата виден на примере простейшей следящей системы (рис. 1). Если на входе имеем сигнал v, изменяющийся с постоянной линейной скоростью a1, то установившийся режим будет иметь место лишь в случае, когда выходная величина у будет изменяться с той же скоростью а1.
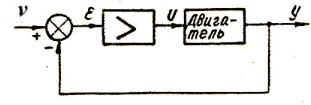
Рис. 1
Но для этого необходимо подвести к двигателю определенное напряжение u=a1/kдв, зависящее от коэффициента усиления двигателя kдв. Это напряжение может появиться только при наличии сигнала ошибки εуст. Чем больше коэффициент усиления усилителя kус, а следовательно, и всей системы – k=kусkдв, тем меньшее значение εуст=а1/k требуется для вращения двигателя со скоростью, равной скорости изменения входного сигнала.
Используя выражение (17), по заданным значениям скорости а10 и скоростной ошибки (εск)доп можно найти величину коэффициента усиления
 . (18)
. (18)
обеспечивающую требуемую точность воспроизведения сигнала v(t)=a10t.
Если ν≥2 (система с порядком астатизма выше первого), то скоростная ошибка равна нулю.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2758; Нарушение авторских прав?; Мы поможем в написании вашей работы!