КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Процедура регулировки на примере механизма РЗГ
|
|
|
|
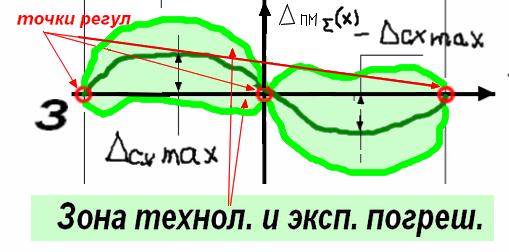
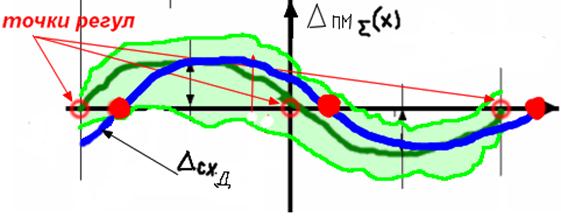
Регулировка по краям диапазона.
Оптимальное соотношение схемных параметров чувствительности k, нелинейности x и диапазона Дх (Dx):
Выражение для DCX(х) с учетом (*)

Экстремальны е значения
DCX мах= 0,048 (x /z) Dx2
Точки регулировки (точки, в которых функция погрешности DCX(х) принимает значение равное нулю) находятся на краях диапазона и в центре диапазона:

Среднеквадратическое значение погрешности схемы:
Максимальная относительная нелинейность:
1. Задать перемещения входного звена, соответствующие значениям точек регулировки
2. Сравнить положения выходного звена (указателя) с отметками на шкале, соответствующим середине и краям диапазона ± Dx/2.
3. Определить несоответствия (погрешности регулировки ПМ) и определить источник погрешности и выполнить регулировку.
Пример. Для Dx = 0.1 мм(±0,05) и регулировки по краям.
Для «эталонных» перемещений х применяем концевые меры длины (КМД) и блоки КМД с размерами х1=10, х2= 10,05, х3=10,1мм.
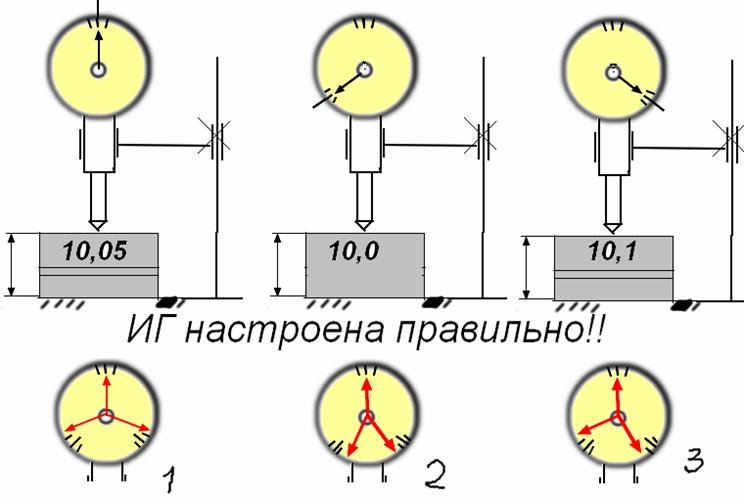
1) чувствительность Кд < К ном
2) чувствительность Кд > К ном
3) чувствительность Кд @ К ном, положение точек регулировки смещены в «плюс».
4) и т.п.
ЧАСТЬ 4. Рычажные передаточные механизмы.
Назначение: преобразование движений, (поступ-вращ, вращ-вращ, поступ-вращ и т.п.).
Достоинства РПМ:
- простота структуры ПМ
- простота конструкции контактирующих элементов РМ с высшими КП (сфера - плоскость, цилиндр-цилиндр);
– возможна высокая точность изготовления элементов РМ.
Недостатки РПМ:
- схемная (теоретическая) нелинейность ФП;
- ограниченный диапазон движений (Dx и Dy).
- силовые РПМ – проблемы с КП (высшие КП работают с низкими нагрузками, конструкция низших Кинематических Пар менее точная и сложная).
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 657; Нарушение авторских прав?; Мы поможем в написании вашей работы!