КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Особенности пневматических приводов, достоинства и недостатки
|
|
|
|
Под пневмоприводом понимается комплект аппаратуры, включающий в себя один или несколько объемных пневмодвигателей, которые служат для приведения в действие машин и механизмов с помощью находящегося под давлением газа (воздуха).Область и масштабы применения пневматического привода обусловлены его достоинствами и недостатками, вытекающими из особенностей свойств воздуха. В отличие от жидкостей, применяемых в гидроприводах, воздух, как и все газы, обладает высокой сжимаемостью и малой плотностью в исходном атмосферном состоянии (около 1,25кг/м3), значительно меньшей вязкостью и большей текучестью, причем его вязкость существенно возрастает при повышении температуры и давления. Отсутствие смазочных свойств воздуха и наличие некоторого количества водяного пара, который при интенсивных термодинамических процессах в изменяющихся объемах рабочих камер пневмоаппаратов может конденсироваться на их рабочих поверхностях, препятствуют использованию воздуха без кондиционирования.
К достоинствам пневмопривода в сравнении с гидро- и электроприводами относятся:
1. Простота конструкции и технического обслуживания. Изготовление деталей пневмоаппаратов не требует такой высокой точности изготовления и герметизации соединений, как в гидроприводе, т.к. утечки воздуха не столь существенно снижают эффективность работы и КПД системы. Внешние утечки воздуха экологически безвредны и относительно легко устраняются. Затраты на монтаж и обслуживание пневмопривода несколько меньше из-за отсутствия возвратных пневмолиний и применения в ряде случаев более гибких и дешевых пластмассовых или резиновых (резинотканевых) труб. В этом отношении пневмопривод не уступает электроприводу. Кроме того, пневмопривод не требует специальных материалов для изготовления деталей, таких как медь, алюминий и т.п., хотя в ряде случаев они используются исключительно для снижения веса или величины силы трения в подвижных элементах.
2. Пожаро- и взрывобезопасность. Благодаря этому достоинству пневмопривод не имеет конкурентов для механизации работ в условиях, опасных по воспламенению и взрыву газа и пыли, например в шахтах с обильным выделением метана, в некоторых химических производствах, на мукомольных предприятиях, т.е. там, где недопустимо искрообразование.
3. Надежность работы в широком диапазоне температур, в условиях пыльной и влажной окружающей среды. В таких условиях гидро- и электропривод требуют значительно больших затрат на эксплуатацию, т.к. при температурных перепадах нарушается герметичность гидросистем из-за изменения зазоров и изолирующих свойств электротехнических материалов, что в совокупности с пыльной, влажной и нередко агрессивной окружающей средой приводит к частым отказам. По этой причине пневмопривод является единственным надежным источником энергии для механизации работ в литейном и сварочном производстве, в кузнечно-прессовых цехах, в некоторых производствах по добыче и переработке сырья. Благодаря высокой надежности пневмопривод часто используется в тормозных системах мобильных и стационарных машин.
4. Значительно больший срок службы, чем гидро- и электропривода. Срок службы оценивают двумя показателями надежности: гамма-процентной наработкой на отказ и гамма-процентным ресурсом. Для пневматических устройств циклического действия ресурс составляет от 5 до 20 млн. циклов в зависимости от назначения и конструкции, а для устройств нециклического действия около 10-20 тыс. часов. Это в 2-4 раза больше, чем у гидропривода, и в 10-20 раз больше, чем у электропривода. Таким образом срок службы пневмосистем достигает 10-15 лет при круглосуточной работе автоматизированного оборудования в межремонтный период, который может составлять 8-12 месяцев.
5. Высокое быстродействие. Поступательное движение штока пневмоцилиндра возможно со скоростью до 15 м/с, а частота вращения выходного вала некоторых пневмомоторов доходит до 100 000 об/мин. Это достоинство в полной мере реализуется в приводах циклического действия, особенно для высоко-производительного оборудования, например, в манипуляторах, прессах, в тормозных и фиксирующих устройствах, причем увеличение количества одновременно срабатывающих пневмоцилиндров практически не снижает время срабатывания. Высокая скорость вращательного движения используется в приводах сепараторов, центрифуг, шлифовальных машин, бормашин и др. Реализация больших скоростей в гидроприводе и электроприводе ограничивается их большей инерционностью (масса жидкости и инерция роторов) и отсутствием демпфирующего эффекта, которым обладает воздух.
6. Возможность передачи пневмоэнергии на относительно большие расстояния по магистральным трубопроводам и снабжение сжатым воздухом многих потребителей. В этом отношении пневмопривод уступает электроприводу, но значительно превосходит гидропривод, благодаря меньшим потерям давления рабочего тела в протяженных магистральных линиях. Расстояние передачи пневмоэнергии экономически целесообразно до нескольких десятков километров, что реализуется в пневмосистемах крупных горных и промышленных предприятий с централизованным питанием от компрессорной станции. Для сравнения, максимальная протяженность гидросистем составляет около 250-300м в механизированных комплексах шахт для добычи угля, причем в них используется в качестве рабочей жидкости обычно менее вязкая, чем масло водно-масляная эмульсия.
7. Отсутствие необходимости в защитных устройствах от перегрузки давлением у потребителей. Требуемый предел давления воздуха устанавливается общим предохранительным клапаном, находящимся на источниках пневмоэнергии. Пневмодвигатели могут быть полностью заторможены без опасности повреждения и, могут находиться в этом состоянии длительное время.
8. Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро- и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов.
Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается в основном экономическими соображениями из-за больших потерь энергии в компрессорах и пневмодвигателях, а также следующими недостатками:
1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70% и 90%, то КПД пневмопривода обычно составляет 5-15% и очень редко доходит до 30%. По этой причине пневмопривод не применяется в машинах с длительным режимом работы и большой мощности, кроме случаев, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу).
2. Относительно большой вес и габариты пневмоаппаратов из-за низкого рабочего давления. Если удельный вес гидромашин, приходящийся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такой же вес и габариты, как последние.
3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке и фиксации привода в промежуточном положении. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством.
4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно- циклического действия. Наиболее шумные гидроприводы (к ним относятся приводы с шестеренными машинами) создают шум на уровне 85-104 дБ, а обычно уровень шума гидравлического привода значительно ниже, примерно как у электромашин, что позволяет работать без специальных средств шумопонижения.
5. Малая скорость передачи сигнала (управляющего импульса), что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360м/с. В гидроприводе и электроприводе скорость сигнала, соответственно, около 1000 и 300 000м/с.
Перечисленные недостатки могут быть частично устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов.
1.2 Свойства воздуха как рабочего тела передачи. Способы преобразования энергии в пневматических приводах.
Пневматическим приводом называется пневматический механизм, в котором рабочий газ находится под давлением, с одним или более объемными пневмодвигателями.
В качестве рабочего тела в пневмоприводах применяют воздух. Воздух представляет собой сжимаемую среду, и при его движении появляются силы трения. Движение воздуха может быть установившимся и неустановившимся. При установившемся движении величины, определяющие состояние воздуха, не меняются во времени, а при неустановившемся меняются.
Основными физическими параметрами воздуха, представляющими интерес для технических систем, являются давление, температура, плотность (или удельный объем), вязкость и сжимаемость.
Под давлением р воздуха понимается абсолютное давление, влияющее на физические свойства воздуха. Единицей измерения давления является Паскаль (1Па=1Н/м2). Также существуют и другие единицы для измерения давления (1бар=0,1МПа≈1атм). Давление атмосферного воздуха на находящиеся в нем предметы и на земную поверхность называют атмосферным. Среднее значение атмосферного давления ратм=0,101325МПа. В пневматических системах используют сжатый воздух, абсолютное значение давления которого рабс в несколько раз превышает атмосферное давление (наиболее распространенным номинальным давлением в пневмоприводах является р=0,4 - 0,63 МПа). В технике также используют понятие избыточное давление: ризб= рабс - ратм.
Температуру Т воздуха определяют по абсолютной шкале Кельвина. Под нормальными условиями состояния газа понимают его состояние при Т=273 К или при t=0’C. При расчетах промышленных пневмоприводов принимают температуру Т=290 К.
Плотностью газа r называется отношение его массы к занимаемому объему: r=m/V. Величина обратная плотности называется удельным объемом газа Vуд=V/m.
Вязкость n воздуха (свойство жидкостей и газов оказывать сопротивление сдвигу) по сравнению с вязкостью жидкости весьма мала, и при повышении температуры увеличивается незначительно. Кинематическая вязкость воздуха находится в пределах 0,007 – 0,014 см2/с.
Сжимаемость b воздуха характеризуется уменьшением его объема при увеличении абсолютного давления: b=DV/(Dp*V), где DV – изменение объема, Dp – увеличение абсолютного давления,V – первоначальный объем.
Удельная теплоемкость с воздуха представляет собой отношение количества теплоты, сообщаемого единице массы воздуха, к соответствующему изменению температуры, различают удельные теплоемкости при постоянном давлении и постоянном объеме (теплоемкость – количество энергии, необходимое для нагревания газа массой 1кг на 1К). При температуре 273…373К можно принять теплоемкости при постоянном давлении cp=1,01*103Дж/(кг×К) и постоянном объеме cV=0,72*103Дж/(кг×К).
При сжатии и расширении воздуха изменяются его энергия и параметры. Различают процессы:
1. изохорный (при постоянном объеме: p/T=const, р1/р2=Т1/Т2),
2. изобарный (при постоянном давлении: V/T=const, V1/V2=T1/T2),
3. изотермический (при постоянной температуре: pV=const, р2V1=p2V2)
4. адиабатический (при отсутствии теплообмена с окружающей средой: pVk=const, где k=cp/cv - показатель адиабаты, для воздуха k=1,4),
5. политропный (учитывается теплообмен между газом и внешней средой: pVn=const, где n=(cp-c)/(cv-c) показатель политропы, для наиболее распространенных пневмоприводов n=1,25…1,35).
Расчет процессов в пневмоприводах основывается на законах и уравнениях газовой динамики и термодинамики. Уравнение состояния воздуха определяется зависимостью Менделеева-Клайперона: рV=mRT, где р – давление, V – объем, T – температура, m – масса газа, R – газовая постоянная (R - это работа расширения, совершаемая 1кг воздуха при нагревании его с постоянным давлением на 1К, R=cp-cv=287 Дж/(кг*К)).
В силовых пневмоприводах давление и объем в рабочих полостях чаще всего величины переменные, поэтому изохорный и изобарный процессы используются для расчета в редких случаях. При работе пневматического привода энергия к рабочей среде извне не подводится, однако в результате работы сил аэродинамического сопротивления выделяется тепло, часть которого воспринимается воздухом, заключенным в рабочем пространстве привода, а часть – передается корпусным деталям и окружающей среде. Т.о. реальные процессы не соответствуют ни изотермическому, ни адиабатическому, а находятся где-то между ними. Реальные процессы считают политропическими, описывающимися зависимостью pVудn=const или p/rn=const, где n – показатель политропы (1<n<k), который зависит от работы сил аэродинамического сопротивления и величины тепловой энергии, получаемой воздухом.[2]
Расход – величина, определяемая отношением массы (массовый) или объема (объемный) вещества, равномерно перемещаемого через сечение, перпендикулярное направлению скорости потока, к промежутку времени, за который это перемещение происходит:
Объемный расход:  , м3/с
, м3/с
где V – объем, м3; t – время, с; v – средняя по сечению скорость потока, м/с; S – площадь поперечного сечения трубопровода, м2. Как видно из приведенной формулы объемный расход можно представить как произведение площади поперечного сечения трубы на среднюю по сечению скорость движения газа в ней.
Массовый расход:  , кг/с
, кг/с
где ρ – плотность газа, кг/м3.
Между объемным и массовым расходами существует следующая зависимость:  .
.
Воздух также как и жидкость является текучей средой и может передавать давление в одинаковой степени во всех направлениях. Воздух всегда занимает весь предоставленный ему объем даже при давлениях ниже атмосферного. У воздуха нельзя в отличие от жидкости считать плотность постоянной величиной при заданной температуре. С увеличением давления плотность воздуха возрастает, с уменьшением ‑ снижается. При сжатии воздух разогревается, а при расширении – охлаждается. С повышением температуры вязкость воздуха увеличивается, в отличие от жидкостей.
Ламинарный режим движения воздуха характеризуется упорядоченным движением (т.е. слоями) газа, причем, скорости внешних слоев меньше, чем внутренних. Когда скорость движения превысит некоторую критическую величину, слои начинают перемешиваться, образуются вихри, течение становится турбулентным.
Критическая скорость, при которой происходит переход от ламинарного течения к турбулентному:
vкр=Reкр*n/d, м/с
где n - кинематическая вязкость жидкости, м2/с, d – внутренний диаметр трубы, м2, Reкр – критическое число Рейнольдса, б/р. При Re < Reкр – ламинарный режим, Re > Reкр – турбулентный. (Для труб круглого сечения Reкр»2300).
Зная скорость движения потока, вязкость газа и внутренний диаметр трубы, можно расчетным путем найти число Рейнольдса и, сравнив его с величиной Reкр, определить режим течения газа.
Потери давления воздуха в пневмосистеме связаны с трением его о стенки труб и с потерями на местных сопротивлениях. Потери давления в линиях зависят от режима течения жидкости, определяемого числом Рейнольдса Re. В трубопроводах систем режим течения обычно ламинарный, в соединениях трубопроводах и в аппаратах – турбулентный.
Потери давления в трубах круглого сечения:
 , Па
, Па
где L – длина участка трубопровода, м; l - коэффициент трения (при р=0,4МПа и Т=303К l»(1,5…2)×10-7); d – диаметр трубопровода, м; v – средняя скорость потока, м/с; r - плотность воздуха, кг/м3.
Потери давления на местном сопротивлении (при расширении или сужении потока, повороте труб, перекрытии труб аппаратурой управления и регулирования):
 , Па
, Па
где x - коэффициент местного сопротивления (приводится в справочниках для различных типов аппаратуры), b – поправочный коэффициент (учитывает зависимость потерь от числа Рейнольдса при ламинарном течении), v – средняя скорость потока, м/с, r - плотность воздуха, кг/м3.
Общие потери в приводе рассчитываются по формуле:
Dробщ=SDртр+SDрм.сопр+SDра,
где SDра - потери давления на пневмоаппаратах (обычно указываются в технической документации на конкретную аппаратуру).
Расход газа через отверстие – зависит от различных факторов, но, прежде всего, от температуры и соотношения давлений на входе pвх и выходе рвых. Расход вычисляется по формуле Сен-Венана:
 , где f- площадь отверстия; p и T – давление и температура воздуха на входе в отверстие;
, где f- площадь отверстия; p и T – давление и температура воздуха на входе в отверстие;  ; j(s) - функция расхода при адиабатическом процессе.
; j(s) - функция расхода при адиабатическом процессе.

|
|
|
|
Рис. 1.1. Функция расхода.
Таким образом, при истечении газа через отверстие могут быть два режима:
1) надкритический режим, при этом расход газа (рис. 1.1) определяется зависимостью (1) и не меняется с изменением давления окружающей среды;
2) докритический режим, при котором расход газа определяется зависимостью (2) и величина расхода зависит от относительного давления s.
Потери энергии потока в конструкциях устройств учитываются коэффициентом расхода m, т.е. отношением действительного расхода к теоретическому. Этот коэффициент меньше единицы (0,1…0,6) и зависит от конфигурации рассматриваемого местного сужения потока и режима течения газа.
1.3. Особенности применения пневматических приводов в промышленных роботах и на путевых машинах.
В промышленных роботах (ПР) пневматический привод выбирают при наличии централизованной пневмосети и сравнительно несложных технологических требованиях, когда не требуется промежуточное позиционирование звеньев робота, при потребляемой мощности 60 – 800 Вт. Промышленные роботы с пневмоприводом обычно имеют небольшие (до 20 – 30 кг) грузоподъемности, высокие скорости движения исполнительных звеньев (до 15м/с), и могут эксплуатироваться в тяжелых условиях окружающей среды. При автоматизации несложных технологических процессов применяют роботы с 1-3 степенями подвижности, при перепрограммируемых технологических процессах с 5-6 степенями подвижности. В ПР пневматические приводы применяются для выполнения операций, как с поступательным, так и с поворотным движением звеньев привода, а также для управления захватным устройством. Логические элементы пневмопривода позволяют реализовать многие функции программного управления приводом без применения электронных систем (устройства пневмоавтоматики). К недостаткам ПР с позиционным пневмоприводом можно отнести необходимость применения при организации робототехнических комплексов конструктивно сложных и трудоемких в изготовлении подающих и приемо-передающих устройств, которые должны обеспечивать ориентированную подачу заготовок или полуфабрикатов для их захвата ПР.
Областью применения позиционных пневмороботов являются холодная листовая штамповка, механообработка, литье под давлением и ряд других производств, связанных с загрузкой/выгрузкой различного технологического оборудования и выполнением элементарных сборочных операций. Остановка подвижных элементов робота на жестких упорах дает возможность обеспечить достаточно высокую точность позиционирования: ± (0,5 …0,1) мм у роботов грузоподъемностью от 5 до 15 кг и до ±0,05 мм у роботов грузоподъемностью от 0,5 до 2кг.[8, 3]
Пневматический привод как привод исполнительных механизмов на путевых машинах (ПМ) не получил такого широкого распространения, как в робототехнике, что связано с большими усилиями на рабочих органах ПМ и свойствами энергоносителя привода. Тем не менее пневмопривод применяют на выправочно-подбивочно-рихтовочных машинах, снегоочистителях, снего- и землеуборочных машинах, путевых стругах, путеизмерителях, рельсошлифовальных поездах. Пневмопривод на ПМ используется для приведения в рабочее или транспортное положение рабочих органов машины, подачи звукового сигнала, приведения в действие стеклоочистителей и тормозов.
Если ПМ не является автономной, то сжатый воздух в пневматическую систему поступает от компрессора локомотива или через разобщительный кран от тормозной магистрали. Для снижения давления в рабочей магистрали привода рабочих органов ПМ по сравнением в питательной магистрали локомотива с 0,8¸0,85 МПа до 0,6¸0,65 МПа на ней устанавливают редукционные клапаны. Пневматические системы ПМ комплектуются из унифицированных элементов, но имеют различия по составу пневмоустройств с приводами ПР в связи с конструктивными особенностями. Пневматические рабочие системы ПМ включают в себя аппаратуру: подготовки воздуха, контрольно-регулирующую, распределительную, пневмодвигатели управления исполнительными органами, звуковые сигналы, воздухопроводы и соединительную арматуру. Пневмоаппаратура подготовки воздуха и контрольно-регулирующая находится в кабине водителя и оператора и включает в себя, те же пневматические аппараты, что и блок подготовки сжатого воздуха ПР. Распределительная система включает в себя распределители дискретного действия и переключательные клапаны, выполняющие функцию ИЛИ. В отличие ПР на ПМ используются в основном распределители с ручным управлением. В качестве пневмодвигателей в приводах рабочих органов ПМ используют пневмоцилиндры двустороннего и одностороннего действия с возвратной пружиной и без нее. Поворотные и ротационные пневмодвигатели на ПМ не используют. На крышках пневмоцилиндров большого объема (в пневмоприводах снегоочистителей) устанавливают клапаны быстрого выпуска воздуха, что позволяет ускорить срабатывание механизмов. На стругах-снегоочистителях рабочие органы закрепляются в определенных положениях пневматическими стопорами. Пневматическая рабочая система выправочно-подбивочных и рихтовочных машин приводит в рабочее положение подбивочные блоки, механизмы подъема и сдвига пути, контрольно-измерительные тележки, подает звуковые сигналы и обдувает приборы, расположенные в запыленной зоне.[7, 10]
1.4. Структура пневматического привода.
Пневмопривод в общем случае состоит из компрессора, преобразующего механическую энергию в энергию сжатого газа, пневмоемкости, пневмоаппаратуры управления и контроля, двигателя, пневмолиний и различного вспомогательного оборудования. Структурная схема пневматического привода показана на рис. 1.2.
Функционально пневмопривод можно разделить на следующие узлы: 1) блок подготовки воздуха,; 2) блок распределения сжатого воздуха; 3) блок исполнительных двигателей; 4) систему передачи сжатого воздуха между устройствами привода.
Обычно блок подготовки является общим для всех приводов степеней подвижности механизма и включает в себя фильтр-влагоотделитель, маслораспылитель и редукционный клапан. В пневмопривод одной степени подвижности входят двигатель, распределительное устройство и регулятор скорости.
Распределительные устройства служат для управления подачей воздуха в двигатель, к ним относятся обратные клапаны и распределители. Выполняют их из золотников или клапанов обычно с электромагнитным или пневматическим управлением, сигналы на распределители поступают от устройства управления приводом.

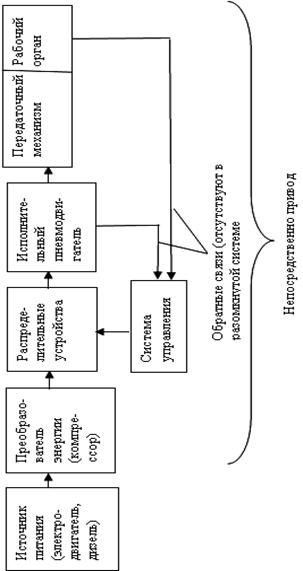
В качестве исполнительных двигателей в пневмоприводах с цикловой системой управления используются пневмоцилиндры, поворотные и ротационные пневмодвигатели (пневмомоторы). Наиболее широкое распространение в качестве пневмодвигателей получили двусторонние поршневые пневмоцилиндры из-за их простоты, надежности и возможности создания больших рабочих усилий.
Регулятор скорости привода поддерживает заданную скорость его движения путем стабилизации расхода воздуха, подаваемого в двигатель. Для пневматических приводов характерна переменная скорость перемещения поршня в цилиндре вследствие сжимаемости энергоносителя (воздуха). Как отмечалось ранее, это затрудняет возможность стабилизации скорости и определяет специфичность пневмопривода по сравнению с гидроприводом. Для регулирования скорости в пневмосистемах применяют дроссельный способ (т.е. частичное открытие рабочего проходного сечения с помощью регулирующей аппаратуры), при этом дросселирование на выходе является наиболее распространенным и эффективным.
Схема управления двусторонним двигателем с начальным перепадом давления с помощью двухпозиционного трехлинейного распределителя изображена на рисунке 1.3. После переключения управляющего устройства(например, конечного переключателя), срабатывает распределитель 1 и магистраль соединяется через соответствующую полость распределителя слевой полостью рабочего цилиндра, начальное давление в которой равно атмосферному. Т.к. в начальный момент р1/р2<sкр, то наполнение левой полости цилиндра будет сначала происходить в надкритическом режиме. После того как давление воздуха в левой полости достигнет критического значения, а поршень из-за наличия сил сопротивления еще не тронулся с места, наполнение будет продолжаться при постоянном объема левой полости, но уже при подкритическом режиме.
Момент начала движения соответствует моменту достижения равенства всех приложенных к поршню усилий: p1F1=p2F2+Ртр+Ри
где р1 и р2 – давление сжатого воздуха в рабочей и выхлопной полостях, Па; F1 и F2 – площади поршня цилиндра со стороны рабочей и выхлопной полостей, м2; Ртр – сила трения, Н; Ри – сила инерции, Н.

Рис. 1.3. Схема управления двусторонним пневмоцилиндром.
Т.е. когда перепад давления достигнет величины, необходимой для преодоления всех сил Р сопротивления привода, поршень 4 начинает перемещаться. При движении поршня или после его остановки соединенное со штоком устройство выполняет технологическую операцию, для которой оно предназначено (например, подачу изделий или их зажатие). В конце рабочего хода срабатывает конечный выключатель, распределитель 1 переключается и сжатый воздух из магистрали поступает в правую полость рабочего цилиндра исполнительного устройства, поршень 4 движется в обратном направлении. Таким образом, при обратном ходе, как и при прямом, в одной полости давление атмосферное, а в другой — магистральное, т. е. имеет место начальный перепад давлений воздуха по обе стороны поршня. Дроссели 2 и 3 служат для регулирования скорости поршня.[11]
Глава 2. Элементная база пневмоприводов.
2.1. Источники сжатого воздуха.
Наиболее распространен способ получения сжатого воздуха при помощи компрессора, работающего совместно с аккумулятором. По физическому принципу работы различают компрессоры объемного и динамического типов. В объемных компрессорах, работающих по принципу вытеснения, воздух замыкают в рабочей камере и затем уменьшают его объем, после чего рабочая камера соединяется с отводящим (нагнетательным) трубопроводом, т.е. за цикл у компрессора происходит всасывание воздуха и сжатие. Процесс сжатия на основании законов термодинамики сопровождается выделением большого количества тепла, для отвода которого применяются различные радиаторы охлаждения. В динамических компрессорах воздух поступает на рабочий орган, сообщающий ему кинетическую энергию, которая на выходе компрессора преобразуется в потенциальную.
Объемные компрессоры, применяемые в пневмоприводах, бывают поршневыми, одно- и многоступенчатыми, ротационными, диафрагменными. В пневматических приводах машин наибольшее распространение получили поршневые и ротационные компрессоры.
2.2. Устройства подготовки сжатого воздуха.
Основными загрязняющими компонентами сжатого воздуха являются вода, масло (в жидком и газообразном состоянии) и твердые включения. Элементы и устройства пневмопривода могут нормально работать при условии, что к ним подводится воздух, очищенный от механических частиц и влаги. Кондиционеры служат для стабилизации в заданных пределах свойств рабочего газа, к ним относятся – фильтры, влагоотделители, маслоотделители, холодильники и пневмоглушители. Принципы действия и конструкции этих устройств рассмотрены в главе 2.7.
Для очистки сжатого воздуха используются фильтры-влагоотделители. Если требуется более тщательная очистка воздуха от влаги, после фильтра-влагоотделителя устанавливается осушитель, в котором оставшаяся влага адсорбируется окисью алюминия или силикагелем. Для задержания пыли, содержащейся в самом адсорбенте, применяют сетки и фильтры из фетра или батиста.
В воздухе всегда имеется некоторое количество водяного пара, который при определенных условиях может выделяться из воздуха и конденсироваться на рабочих поверхностях пневмоустройств. С повышением температуры относительная влажность (отношение массы водяного пара в единице объема к максимально возможной его массе в том же объеме при той же температуре и при том же давлении) уменьшается, а при понижении температуры – увеличивается. Если при уменьшении температуры относительная влажность будет больше 100%, то из воздуха выпадет конденсат. Повышение давления воздуха сопровождается увеличением его влажности и повышением температуры. При расширении сжатого воздуха не только понижается температура, но и увеличивается возможность выделения конденсата.
Для улучшения условий работы различных распределителей и исполнительных механизмов, имеющих трущиеся поверхности, к ним необходимо подводить смазку. В большинстве промышленных систем смазка элементов пневмопривода осуществляется при помощи сжатого воздуха, насыщенного масляным туманом. Этот процесс протекает в маслораспылителе, работы которого напоминает работу пульверизатора.
В общую систему подготовки воздуха (рис 2.1) входят компрессор 1, на всасывающей линии которого установлен фильтр 2 с целью предохранения компрессора от преждевременного изнашивания в результате попадания пыли. Воздухозаборник 3 устанавливают вдали от источников загрязнения воздуха. Сжатый компрессором воздух охлаждается обычно водяным холодильником 4. При охлаждении из воздуха выделяется 70 – 80% влаги и сжатый воздух собирается в ресивере. Ресивер аккумулирует запасы сжатого воздуха, сглаживает пульсации давления. Объем ресивера выбирают в зависимости от режима работы компрессорной установки, и величина его должна составлять не менее половины объема воздуха, всасываемого компрессором в течение одной минуты. В ресивере также конденсируется некоторое количество влаги, которое по мере накопления автоматически удаляется через вентиль 6. Предохранительный клапан 7, установленный на ресивере, ограничивает повышение давления в ресивере при выходе из строя системы автоматики 8, которая управляет работой электродвигателей 10 компрессоров.
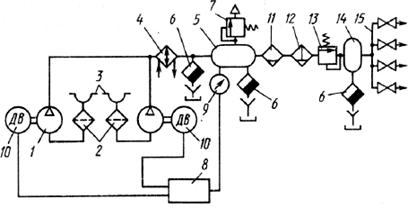
Рис. 2.1. Система подготовки воздуха.
При достижении верхнего установленного давления контактный манометр 9 отключает двигатель 10 и включает их при уменьшении давления до нижнего установленного предела. За ресивером установлены маслоотделитель 11 и влагоотделитель 12, в которых отделяются из воздуха масло и влага, оставшиеся после конденсации их большей части в холодильнике и ресивере. Давление в воздушной линии устанавливается и поддерживается с помощью регулятора давления 13. Часто перед распределительным коллектором 15, направляющим воздух к потребителям, устанавливается дополнительный ресивер 14 меньшей емкости, чем ресивер 5 [4].
Блок подготовки воздуха – это совокупность устройств кондиционирования воздуха, которые должны располагаться на каждой автономной машине или на каждом механизме. В него обычно входят фильтр-влагоотделитель, редукционный клапан, манометр и маслораспылитель (рис. 2.2).
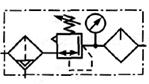

Рис. 2.2. Детальное и упрощенное обозначение БПВ.
2.3. Пневматические двигатели,
конструкция и параметры.
Пневмодвигатели подобны гидродвигателям по принципу действия и конструкции, за исключением того, что в качестве рабочей среды в них используется газ (воздух). Рабочая полость – пространство двигателя, в которое поступает воздух из пневмосети, выхлопная полость – пространство двигателя, соединенное со средой, в которую происходит выброс воздуха.
Пневмодвигатели по характеру движения выходного звена делятся на двигатели поступательного действия (пневмоцилиндры), пневмомоторы (ротационные пневмодвигатели) и поворотные пневмодвигатели. В зависимости от конструкции рабочей камеры цилиндры подразделяют на поршневые, плунжерные, телескопические, мембранные и сильфонные (рис. 2.3). Поршневым называется цилиндр, в котором рабочие камеры образованы рабочими поверхностями корпуса и поршня со штоком. Поршневые цилиндры разделяют по следующим признакам: 1) по направлению действия сжатого – одностороннего и двустороннего действия; 2) по числу штоков – с односторонним и двусторонним штоком; 3) по виду выходного звена – с подвижным штоком и подвижным корпусом. Плунжерным цилиндром называется цилиндр одностороннего действия с рабочей камерой, образованной рабочими поверхностями корпуса и плунжера (поршень без штока, одинакового диаметра по всей длине).
В пневматических приводах в качестве пневмодвигателей наиболее широкое распространение получили двусторонние поршневые пневмоцилиндры из-за их простоты, надежности и возможности создания больших рабочих усилий. Мембранные и сильфонные пневмоцилиндры применяют при ограниченных перемещениях штока в различных устройствах типа захватов, зажимов, фиксаторов и т.п.
В промышленности для получения вращения выходного вала широко используются пластинчатые пневмомоторы (ручные пневмодрели и высокооборотные шлифовальные машинки). Конструктивная схемы пластинчатых и шестеренных пневмомоторов практически не отличаются от схем соответствующих гидромашин.
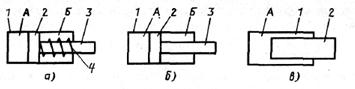
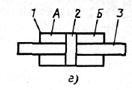
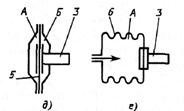
Рис. 2.3. Схемы цилиндров: а—поршневого с односторонним штоком одностороннего действия; б — поршневого с односторонним штоком двустороннего действия; в — плунжерного; г — поршневого с двусторонним штоком двустороннего действия; д — мембранного; е — сильфонного. 1 – корпус, 2 – поршень или плунжер, 3 – шток, 4 – пружина,5 – мембрана, 6 – сильфон.

а) б)
Рис. 2.4. Поворотные пневмодвигатели: а) с реечной передачей, б) шиберный.
Поршневой поворотный пневмодвигатель с реечной передачей (рис. 2.4 а) выполняют на базе передачи «шестерня — рейка». Шестерня 3 устанавливается на выходном валу 4 и входит в зацепление со штоком-рейкой 2, которая жестко связан с поршнями 1 двух разнонаправленных цилиндров одностороннего действия.[6]
При подаче сжатого воздуха в рабочую полость одного из пневмоцилиндров поршни вместе со штоком-рейкой совершают прямолинейное движение, которое посредством реечной передачи преобразуется во вращательное (в пределах одного оборота) движение вала 4.
Очевидно, что поршневые пневмодвигатели можно выполнить таким образом, чтобы в конце рабочего хода происходило демпфирование, а поршни были снабжены магнитными вставками с целью обеспечения возможности бесконтактного опроса их положения. В некоторых конструкциях предусматривается также регулирование угла поворота. Максимальный крутящий момент, развиваемый поршневыми поворотными пневмодвигателями, составляет 150Н×м (при диаметре поршней 100мм).
В шиберном поворотном пневмодвигателе (рис. 2.4 б) воздух воздействует на шибер 1 - жестко закрепленную на выходном валу 2 пластину. Но эти устройства не нашли широкого применения, т.к. они отличаются большим моментом трения, сложностью уплотнения камер управления и выходного вала.Шиберный поворотный пневмодвигатель (рис. 2.4, б) устроен таким образом, что сжатый воздух воздействует на шибер 1 — жестко закрепленную на выходном валу 2 пластину, расположенную внутри цилиндрической расточки 3 в корпусе 4. Чтобы предотвратить перетекание воздуха из одной рабочей полости двигателя в другую пластину выполняют с резиновым либо пластмассовым покрытием. Угол поворота шибера зависит от размеров корпусного ограничителя 5 и в стандартных конструкциях составляет 90, 180 или 270 градусов. Для установки произвольного угла поворота шиберные пневмодвигатели снабжают внешними передвижными упорами. Такого типа пневмодвигатели развивают крутящий момент до 250 Н-м.
При выборе поворотного двигателя или пневмомотора значение моментов инерции приводимых во вращательное движение технологических объектов должны быть меньше указываемых в промышленных каталогах предельно допустимых значений моментов для выбранного типоразмера пневмодвигателя.
Конструкция пневмоцилиндра двустороннего действия показана на рис. 2.5 [3]. Основными деталями цилиндра являются поршень 6, шток 1, крышки 4 и 8, гильза 5. В передней крышке 4 шток установлен в бронзовой втулке 3. Уплотнение неподвижных соединений осуществляется резиновыми кольцами 9 О-образного сечения. Подвижными соединения уплотняются резиновыми манжетами 2 и 7. Капроновая наплавка на поршень 6 практически исключает износ зеркала гильзы 5 и уменьшает потери на трение при работе цилиндра. Для повышения коррозионной стойкости и уменьшения трения внутренняя поверхность гильзы 5 и шток 1 хромируются.
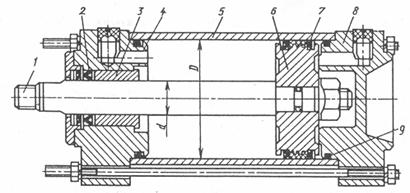
Рис. 2.5. Конструкция пневмоцилиндра.
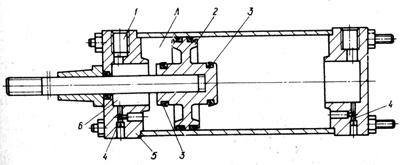
Рис. 2.6. Конструкция пневмоцилиндра с демпфированием.
Торможение при помощи встроенных демпфирующих устройств является наиболее распространенным и считается одним из компактных и эффективных способов при невысоких требованиях к плавности торможения и скоростях пневмопривода, не превышающих 35-40 м/мин. При движении поршня 2 (рис. 2.6) влево воздух из полости А цилиндра выходит через отверстие 1 в трубопровод и далее в атмосферу. При подходе поршня к крышке цилиндра манжета 3 входит в полость 6 крышки 5 и отсекает объем воздуха в полости А. Торможение поршня, а вместе с ним и привода происходит за счет сжатия воздуха в полости А и продавливания его через дроссель 4. Регулированием дросселя подбирается его постоянное сечение таким образом, чтобы торможение происходило без ударов о крышку и без резкой остановки поршня при входе манжеты в полость крышки.[4]
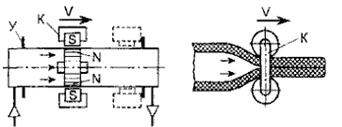
В ряде случаев возникает потребность в перемещении рабочих органов на большие расстояния (до 10…20м) по прямолинейной или искривленной траектории, а применение обычных штоковых пневмоцилиндров ограничено рабочим ходом до 2м. В таких случаях применяют бесштоковые пневмоцилиндры, конструкции которых показаны на рис. 2.7.
а) б)
в)
Рис. 2.7. Схемы бесштоковых пневмодвигателей поступательного движения
На рис. 2.7 а) показан длинноходовой пневмоцилиндр с передачей усилия через сильный постоянный магнит. Абсолютно герметичная гильза цилиндра выполнена из немагнитного материала, а ее внутренняя полость разделяется поршнем на две камеры, к которым подводится сжатый воздух. В поршне и каретке К, соединенной с рабочим органом, встроены противоположные полюса магнита S и N, взаимодействие которых обеспечивает передачу движущего усилия на каретку, скользящую по направляющим на внешней поверхности гильзы. Ход каретки ограничивается конечными упорами У.
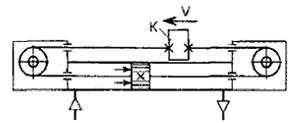
Практически неограниченную длину хода имеют пневмоцилиндры с эластичной гильзой (рис.2.7 б), охватываемой двумя роликами, соединенными кареткой К. Такие пневмоцилиндры очень эффективны для перемещения штучных грузов по сложной траектории в приводах с небольшими рабочими усилиями.
Пневмоцилиндр с гибким штоком показан на схеме рис. 2.7 в). В такой конструкции тяговое усилие передается на каретку К от поршня через гибкий элемент (обычно стальной трос, облицованный эластичной пластмассой), охватывающий обводной и натяжной ролики, расположенные на крышках цилиндра.
Пневмоцилиндры выпускают с креплением на удлиненных стяжках, на переднем, заднем фланце, на проушине, лапах, цапфах.
Основные параметры поршневых пневмоцилиндров:
1) номинальное давление рном, МПа;
2) диаметр поршня D, мм (главный параметр, по которому создаются типоразмеры цилиндров);
3) диаметр штока d, мм;
4) ход поршня L, мм;
5) масса цилиндра m, кг.
2.4. Тормозные устройства пневматических приводов.
Исполнительные механизмы пневмоприводов вследствие высоких скоростей перемещения развивают большую кинетическую энергию, которая должна быть погашена в конце их хода. Пневматические способы торможения можно разделить на 1) торможение методом противодавления, создаваемого в выхлопной полости путем управления процессом опоражнивания или подключения на определенное время выхлопной полости к пневмомагистрали; 2) торможение сбросом движущей силы, путем соединения полости нагнетания с атмосферой или отключения питания и соединения полостей между собой, и 3) торможение при помощи внешних по отношению к пневмоприводу (автономных) устройств (демпферов). Схемы торможения противодавлением и с помощью встроенных устройств эффективны в пневмосистемах лишь при небольших инерционных нагрузках и стабильных параметрах и режимах работы. Часто используются пневматические тормозные устройства, в которых открытие дроссельной щели тормозного клапана регулируется в конце хода при действии упора, связанного со штоком пневмоцилиндра. Используются тормозные устройства (рассмотрены в предыдущем разделе), в которых сам поршень в конце хода перекрывает отверстие, через которое воздух выходит из камеры противодавления, а оставшаяся в полости часть воздуха проходит через дроссель. [7]
Для гашения скорости и амортизации удара движущихся масс в конце хода в пневмоприводах широко применяют гидравлические или пневматические демпферы (амортизаторы), а для маломощных приводов используют более простые пружинные демпферы. Демпферы являются механическими тормозными устройства – сила сопротивления движению создается деформацией рабочих элементов (упругие) или трением (фрикционные). В качестве упругих элементов часто применяются обычные цилиндрические пружины сжатия, резиновые и резино-металлические упругие элементы различной конфигурации. Простейшими тормозными устройствами могут служить одна или несколько цилиндрических пружин, которые устанавливаются непосредственно между рабочими органами и упорами параллельно оси движения либо оформляются в виде отдельного конструктивного узла.
В приводах с позиционированием по упорам при небольших значениях движущихся масс эффективными оказываются автономные пневматические тормозные устройства.
По принципу работы пневматические тормозные устройства могут быть с постоянной массой заключенного в полости цилиндра воздуха или с истечением воздуха из рабочей полости. В зависимости от того, связана или не связана рабочая полость с источником сжатого воздуха, пневматические тормозные устройства можно разделить на устройства без подпитки, в которых сжатие воздуха начинается с атмосферного давления (рис. 2.8 а), и устройства с подпиткой, в рабочие полости которых различным образом подается воздух под давлением (рис. 2.8 б). Для возврата поршня в исходное положение при истечении и отсутствии подпитки предусматриваются возвратная пружина и обратный клапан. При подпитке через регулятор давления РД в рабочей полости пневмоцилиндра создается начальное давление, которое обеспечивает также возврат поршня в исходное положение.[7]
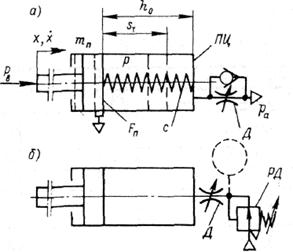
Рис. 2.8. Пневматические демпферы.
Гидродемпферы (гидроамортизаторы) обычно состоят из гидроцилиндра (с поршнем и одно- или двусторонним штоком), заполненным какой-либо жидкостью. При перемещении штока поршень вытесняет рабочую жидкость из рабочей полости цилиндра 1 через дроссельную систему 2 во вспомогательную камеру компенсатора 3 или в полость цилиндра за поршнем (рис. 2.8 б). В последнем случае компенсатор и обратный клапан предназначены для восполнения утечек рабочей жидкости из полостей гидроцилиндра. Вследствие повышения давления в рабочей полости при сжатии жидкости появляется сила торможения поршня, обусловленная гидравлическим сопротивлением. Потеря кинетической энергии в гидродемпферах обусловлена потерями давления на преодоление гидросопротивлений, управляя этими сопротивлениями, можно обеспечить требуемое изменение силы торможения и тем самым заданный закон торможения.[7]

|
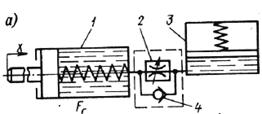

Рис. 2.9. Принцип работы и конструкция гидродемпфера.
На рис. 2.9 в) показана конструкция гидроамортизатора серии SA компании Camozzi. Полости амортизатора заполнены рабочей жидкостью. Перемещающийся объект воздействует на наконечник 1. Усилие через шток 2 передается на поршень 3, вызывая его перемещение. Жидкость перетекает из сжимаемой бесштоковой полости в штоковую через отверстия 5 в аккумуляторе 6. Аккумулятор, представляющий собою трубку из пористого материала, компенсирует разницу объемов полостей за счет изменения собственного объема. Возврат гидроамортизатора в исходное состояние после снятия усилия производится за счет пружины 4 и обратного клапана 7.
2.5. Направляющие и регулирующие аппараты пневматических приводов.
Пневмоаппаратом называют устройство, которое выполняет хотя бы одну из следующих функций управления: изменяет или ограничивает направление потока сжатого воздуха, открывает или перекрывает поток воздуха, изменяет параметры потока (расход или давление) или поддерживает их заданное значение.
По конструкции запорно-регулирующего элемента пневмоаппараты разделяют на клапанные, золотниковые, крановые (рис. 2.10).Для конструкции любого аппарата характерно наличие запорно-регулирующего элемента, которым является подвижная деталь (клапан, золотник, кран), при перемещении частично или полностью перекрывающая рабочее проходное сечение аппарата. Рабочее проходное сечение создается в клапанах (рис. 2.10 а) между кромкой седла 1 и клапана 2 (запорно-регулирующие элементы могут выполнятся в клапанах в виде шарика, иглы, конуса, «тарелки»), в золотниковом аппарате (рис. 2.10 б) - между острыми кромками цилиндрической расточки корпуса 2 и цилиндрического пояска золотника 1, в крановом аппарате (рис. 2.10 в) – между острыми кромками каналов корпуса 2 и крана 1.
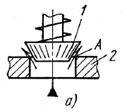
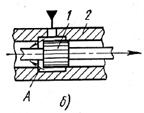

Рис. 2.10. Типы запорно-регулирующих элементов: а) клапанные; б) золотниковые; в) крановые.
По принципу действия аппараты разделяются на клапаны и аппараты неклапанного действия. В клапане размеры рабочего проходного сечения изменяются от воздействия проходящего через него потока рабочего тела, т.е. он является устройством автоматического действия. В аппарате неклапанного действия размеры рабочего проходного сечения изменяются в зависимости от внешнего управляющего воздействия, т.е. от перемещения рабочего органа (вручную, с помощью электромагнита и т.п.).
По характеру открытия рабочего проходного сечения пневмоаппараты разделяют на регулирующие и направляющие. Регулирующим называется аппарат, управляющий расходом или давлением потока сжатого воздуха путем частичного открытия рабочего проходного сечения. Это клапаны давления, аппараты управления расходом и дросселирующие распределители. Направляющие аппараты управляют пуском, остановкой или направлением потока воздуха путем полного открытия или закрытия рабочего проходного сечения. К ним относятся направляющие распределители, клапаны выдержки времени, клапаны последовательности, обратные клапаны. Направляющий аппарат предназначен только для изменения направления потока рабочего воздуха, давление и расход не изменяются.
Основные параметры пневмоппаратов:
1) условный проход Dy, мм;
2) номинальный расход Q, м3/с;
3) номинальное давление рном – наибольшее избыточное давление рабочей среды, поступающей на вход аппарата, при котором он должен работать в течение установленного ресурса с сохранением параметров в пределах установленных норм, МПа;
4) перепад давлений на аппарате Dр, МПа;
5) площадь рабочего проходного сечения S, мм2;
6) масса m, кг.
Под характеристикой аппарата понимают функциональную зависимость между определенными параметрами (например, величиной сигнала управления и давлением на выходе аппарата).
Пневматические аппараты с точки зрения принципа действия не отличаются от соответствующих гидравлических аппаратов. По конструктивному исполнению они также близки к гидроаппаратам, но они многообразнее, потому что небольшие давления в пневмосетях позволяют выполнять аппараты как с плунжерными затворами, так и с клапанными и торцовыми затворами.
2.5.1. Регулирующая аппаратура. Принцип действия и основные параметры.
а) б) в)
Рис. 2.11. Пневматический предохранительный клапан: а) устройство, б) конструкция, в) условное обозначение.
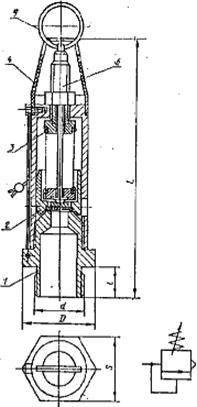
На рис. 2.11 б) показана конструкция предохранительного клапана типа П-КАП. При повышении давления под клапаном сверх давления, определяемого настройкой пружины 3, клапан 2 отходит от седла, находящегося в верхней части штуцера 1, и открывает свободный выход воздуха из пневмосистемы. Сила струи сжатого воздуха поддерживает клапан 2 в поднятом положении до тех пор, пока давление в системе не станет ниже давления настройки, после чего клапан закрывается. Клапан настраивают с помощью винта 6. Для исключения перенастройки клапана служит защитный колпачок 4 с пломбой.
Приспособление для принудительного открывания клапана предназначено для проверки исправности клапана продувкой, для чего необходимо потянуть вверх за кольцо 5. При этом пружина 3 сжимается, и клапан 2 освобождается от ее воздействия. Если клапан не заклинен, то он отходит от седла и открывает выход сжатому воздуху.

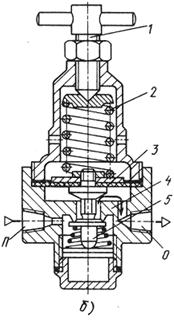
Рис. 2.12. Редукционные клапаны: а) с поршневым и б) мембранным запорно-регулирующим элементом.
Редукционные клапаны (регуляторы давления) предназначены для снижения давления воздуха и автоматического поддержание его на заданном уровне перед поступлением к потребителю.
На рис. 2.12 а) и б) представлены редукционные клапаны с поршневым и мембранным запорно-регулирующим элементом 3. Сжатый воздух подводится к отверстию П клапана. Клапан настраивается с помощью винта 1, действующего через пружину 2 на клапан 5. При повышении давления на выходе пружина 2 сжимается, приподнимая клапан 5 и закрывая проход для воздуха между седлом клапана 4 и клапаном, в результате расход воздуха уменьшается, и давление на выходе восстанавливается. При понижении давления на выходе запорно-регулирующий элемент 3 вместе с клапаном 5 под действием пружины 2 перемещается вниз и открывает проход для воздуха в отверстие О.[3]
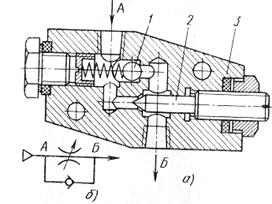
2.13. Пневмодроссель с обратным клапаном: а) конструкция; б) условно-графическое обозначение.
Изменение расхода воздуха в пневмоприводе осуществляется настройкой площади проходного сечения дросселя. Дроссель с обратным клапаном на рис. 2.13 состоит из корпуса 3, в котором размещены игольчатый затвор 2 дросселя и шариковый обратный клапан 1 с пружиной. Если сжатый воздух поступает в канал А, то он подходит к дросселю, проходит через щель между иглой 2 и конической поверхностью отверстия в корпусе и выходит в канал Б. Если же воздух подводится к каналу Б, то он минуя дроссель, открывает обратный клапан и выходит в канал А. Заворачивая игольчатый затвор, можно изменять площадь проходной щели и расход воздуха. Запорный элемент в пневмодросселе может быть также выполнен и в виде плунжера, и в виде прорези.
К регулирующей аппаратуре относятся и дросселирующие распределители. В отличие от дискретных (направляющих) распределителей с электромагнитным управлением (которые рассмотрены в разделе 2.6.2 пособия) в дросселирующих распределителях запорно-регулирующий элемент во всем диапазоне своего перемещения может занимать любое промежуточное положение, определяя тем самым расход воздуха, протекающего через распределитель. Такое управление положением запорно-регулирующего элемента осуществляется посредством регулируемого (пропорционального) магнита, перемещение якоря которого прямо пропорционально силе постоянного электрического тока или напряжению, подаваемому на магнит. Использование пневмораспределителей с пропорциональным управлением позволяет не только позиционировать выходное звено исполнительного механизма привода, но и обеспечить его перемещение со скоростью, значение которой может изменяться по заданному закону.
2.5.2. Направляющая аппаратура.
Эта аппаратура предназначена для изменения направления потока сжатого воздуха путем полного открытия или закрытия рабочего проходного сечения.
Пневматические распределители обеспечивают направление потока воздуха по необходимым трубопроводам.
Пневмораспределители предназначены для изменения направления или пуска и останова потоков сжатого воздуха в двух или более внешних пневмолиниях в зависимости от внешнего управляющего воздействия. Число внешних линий определяет линейность распределителя. По числу фиксированных положений распределительного органа различают двух-, трех- и многопозиционные распределители. Двухпозиционные распределители (наиболее распространенные) могут иметь одностороннее (для переключения распределительного элемента управляющее воздействие прикладывается только к одному чувствительному элементу и в одном направлении, а возврат в исходное положение происходит под действием сил механической или пневматической пружины) и двустороннее управление (трехпозиционные – только двустороннее). Пневматические распределители по конструкции запорно-регулирующего элемента, так же как и гидравлические, разделяются на цилиндрические, плоские и клапанные; по количеству рабочих окон – на одно-, двух-, четырехщелевые. Для уменьшения потерь энергии от непроизводительных утечек золотники в пневмосистемах целесообразно применять с положительным перекрытием.
По виду управления различают распределители с ручным, механическим, электромагнитным, пневматическим, электропневматическим управлением.
Наиболее распространены в пневмоприводах клапанные распределители и распределители с плоским золотником. Клапанный распределитель образуется парой клапан-седло. В распределителях с плоским золотником потоки воздуха распределяются парой плоский золотник-плита. Такие распределители не допускают установки дросселя на выхлопе, т.к. это может приводить к отрыву золотника от плоскости примыкания. Распределители золотникового типа с цилиндрическим золотником в качестве распределительно элемента имеют цилиндрический золотник, перемещающийся вдоль оси в корпусе.
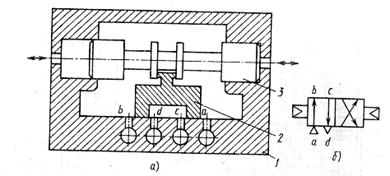
Рис. 2.14. Распределитель с плоским золотником: а) конструкция, б) условно-графическое обозначение.
Распределители с плоским золотником (рис. 2.14) – несложны в изготовлении, просты в обслуживании и надежны в работе. В корпусе 1 таких распределителей перемещается плоский затвор 2, который поджимается к распределительной плоскости и соединяет или разъединяет каналы а, b, c, d, выполненные в корпусе распределителя. При подаче воздуха в один из торцов толкателя 3 он перемещает затвор 2 из одного крайнего положения в другое. При крайних положениях затвора осуществляется определенная коммутация каналов в соответствии с позициями, показанными на рис. 2.14 б.
Клапанный пневмораспределитель, показанный на рис. 2.15, - двухпозиционный трехлинейный с ручным управлением. В отключенном положении, когда пружиной 2 пробка 3, а пружиной 4 клапан 5 прижаты к стенке корпуса 1, канал b соединен с каналом d, связанным с атмосферой. При нажатии на рукоятку управления 6 торец клапана 5 прижимается к торцу пробки 3 и смещает ее вправо. При этом канал d перекрывается, а канал b соединяется с каналом питания сжатым воздухом.
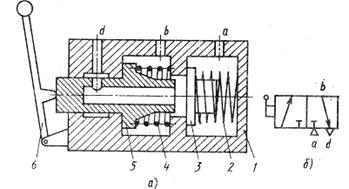
Рис. 2.15. Клапанный распределитель: а) конструкция; б) условно-графическое обозначение.
Золотниковый распределитель с односторонним пневматическим управлением показан на рис 2.16. При подаче воздуха в канал Х поршень 1 перемещается и приводит в движение золотник 2 – происходит переключение распределителя и соединение канала Р с каналом А.
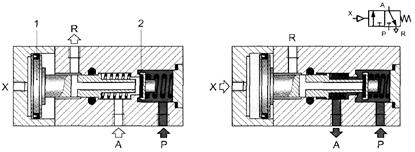
Рис. 2.16. Золотниковый распределитель.
Обратные клапаны предназначены для пропускания сжатого воздуха только в одном направлении. По исполнению запорного элемента выпускают с конусным, плоским и сферическим запорным элементом. Обратные клапаны с конусным и сферическим запорным элементами обеспечивают меньшее сопротивление потоку воздуха, но более трудоемки в изготовлении по сравнению с клапанами с плоским запорным элементом.
Разновидности обратных клапанов представлены на рисунке 2.17. В корпусе 1 обратного клапан размещен затвор 2, поджимаемый к седлу пружиной 4 (в клапанах с коническим а) и плоским б) затвором) или собственным весом (рис. 2.17 в). При подаче воздуха на вход А аппарата поднимается затвор и воздух проходит на выход Б. Если же подавать воздух в канал Б, то он не сможет пройти в канал А. Клапан на рис. 2.17 в) наиболее прост в изготовлении, но его можно эксплуатировать только в вертикальном положении. Для ограничения хода шарика 2 и предотвращения возможного перекрытия им канала Б устанавливают диафрагму 5 (рис. 2.17 и) с отверстиями или другие ограничители хода шарика.
Клапаны могут иметь более сложный уплотнительный элемент, который необходимо менять при изнашивании. В клапане на рис. 2.17 а) центрирование клапана 2 осуществляется цилиндрическим пояском с пазами К для соединения полости перед манжетой 3 с каналом А или с наружной цилиндрической поверхностью самого клапан 2. Пружина 4 (рис. 2.17 а, б) обеспечивает закрытое состояние клапанов при отсутствии подачи воздуха и в любом их положении, поэтому ее рассчитывают по силе собственного веса клапана 2 с учетом сил трения.

2.17. Обратные клапаны.
Пневмоклапаны быстрого выхлопа служат для повышения быстродействия привода путем уменьшения сопротивления выхлопной линии. Схема на рис. 2.18 б)обеспечивает увеличение скорости втягивания штока цилиндра под действием пружины. Здесь клапан обеспечивает быстрый выпуск воздуха из поршневой полости цилиндра при движен
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 14919; Нарушение авторских прав?; Мы поможем в написании вашей работы!