КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пневмогидравлические приводы
|
|
|
|
Пневмогидравлические системы позволяют использовать быстродействие пневматических приводов и возможность устойчивой стабилизации скорости, свойственную гидравлическим приводам. Комбинированные пневмогидравлические приводы используются в основном для перемещения золотников распределителей. В этих приводах энергия, получаемая приводом от сети сжатого воздуха, при необходимости точного регулирования скорости, преобразуется в энергию потока жидкости под давлением.
Пневмогидравлические приводы применяют в тех случаях, когда необходимо получить хорошие регулировочные характеристики и есть возможность использовать подведенную сеть сжатого воздуха. Основным элементом таких приводов является пневмогидравлический преобразователь (вытеснитель), представляющий собой одно- или двухпоршневой бесштоковый цилиндр.
На рис. 3.13 показана принципиальная схема электро-пневмогидравлического усилителя (ЭПГУ) мощности. Рассматриваемый усилитель мощности двухкаскадный: первый каскад ЭПГУ представляет собой вспомогательный дросселирующий пневмораспределитель Р1 с управлением от электромагнитов ЭМ1 и ЭМ2. Вторым каскадом является основной дросселирующий гидрораспределитель Р2 с управлением от сильфонных пневмоцилиндров Ц1 и Ц2, которые подсоединены пневмолиниями к распределителю Р1. Принцип работы ЭПГУ заключается в следующем: при подаче электрического сигнала управления на один из электромагнитов ЭМ1 и ЭМ2 золотник распределителя Р1 перемещается в ту или иную сторону. При этом сжатый воздух под давлением поступает к одному из двух цилиндров Ц1 или Ц2, благодаря которым и осуществляется требуемое управление основным гидрораспределителем Р2.[5]
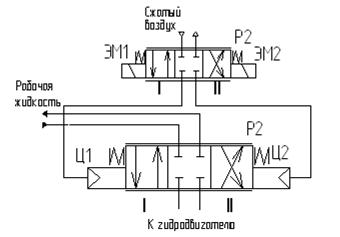
Рис. 3.13. Электропневмогидравлический усилитель мощности.
На рис. 3.14 показана принципиальная схема пневмогидропривода подъема. Привод состоит из направляющего пневмораспределителя Р, гидровытеснителей ВТ1 и ВТ2, гидроклапана «ИЛИ» К, гидрозамка ЗМ и гидроцилиндра Ц. Распределитель Р подключен к пневмомагистрали 1. Пневматические полости Г и Д гидровытеснителей ВТ1 и ВТ2 подключены к пневматическому распределителю Р, а их гидравлические полости В и Е заполнены рабочей жидкостью. При расположении золотника распределителя Р в исходной позиции пневмолинии подвода сжатого воздуха в вытеснители ВТ1 и ВТ2 перекрыты. При перемещении золотника распределителя вправо (поз. I) сжатый воздух подается в полость Г вытеснителя ВТ1, поршень ВТ1 перемещается, рабочая жидкость из полости В через гидрозамок ЗМ начинает поступать в поршневую полость Б и одновременно через клапан К в штоковую полость А цилиндра. Из-за разницы рабочих площадей поршень цилиндра Ц в этом случае перемещается вверх. При перемещение золотника распределителя влево (поз. II) сжатый воздух поступает в вытеснитель ВТ2 и вытесняет из него рабочую жидкость через клапан К в штоковую полость А цилиндра, одновременно с этим жидкость от линии 2 поступает в полость управления гидрозамка ЗМ, который соединив поршневую полость Б цилиндра Ц с вытеснителем ВТ1, дает возможность рабочей жидкости вытесняться из этой полости в полость В вытеснителя ВТ1.[5]
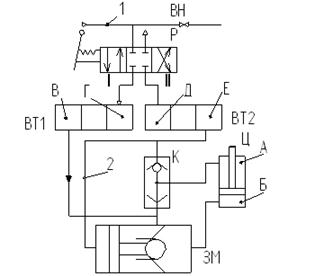
Рис. 3.14. Пневмогидравлический привод подъема.
3.9.Обеспечение безопасности эксплуатации
пневматических систем.
В пневмопривод должны входить устройства, препятствующие распространению шума, устройства для полного снятия давления воздуха. Если снижение давления воздуха или напряжения в электрической сети может создать опасность для работающих или вызвать аварию, должна быть предусмотрена блокировка, обеспечивающая автоматическое прекращение работы машины с подачей сигнала. При этом не должны отключаться устройства (захватные, тормозные), перерыв в работе которых может привести к травмированию рабочих.
Не допускаются скручивание и изломы гибких пневмолиний, трение их о подвижные элементы. Детали и узлы пневмопривода должны быть испытаны на прочность под действием максимального рабочего давления и пробного давления не менее 1,5 от номинального.
Пневмоприводы перед началом работы должны быть испытаны вхолостую, на прочность, под нагрузкой.
В приводе необходимо предусматривать блокирующие и предохранительные устройства для обеспечения безопасности обслуживающего персонала в случае падения давления или повышении его выше допускаемого по условиям работы, а также произвольного срабатывания привода.
Схема, приведенная на рис. 3.15, предназначена для устранения перегрузки, которая может произойти при заклинивании поршня, рабочих органов механизма или по другим причинам. При кратковременном включении распределителя Р1 происходит сброс давления из левой полости управления распределителя Р2, который переключается и сообщает поршневую полость пневмоцилиндра с линией питания, а штоковую с атмосферой. Шток выдвигается и в конце хода упором включает распределитель Р3, который сообщает правую полость управления распределителя Р2 с атмосферой. Переключение распределителя Р2 приводит к реверсу цилиндра. Если при перемещении штока вправо произойдет заклинивание, то давление в поршневой полости повышается, и клапан с пневмовыходом КП подаст сигнал на включение распределителя Р4. Последний соединит правую полость управления распределителя Р2 с атмосферой, и шток цилиндра возвратится в исходное положение. Клапан КП должен быть настроен на более высокое давление, чем требуется для нормальной работы, в том числе и при перемещении поршня.
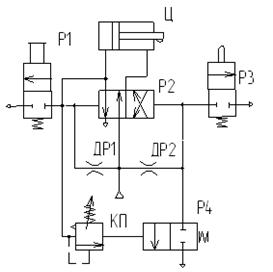
Рис. 3.15. Схема для устранения перегрузки.
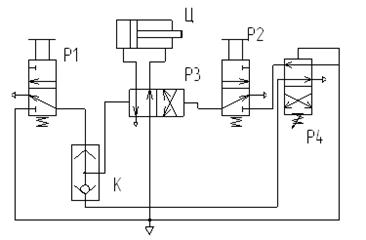
Рис. 3.16. Схема, обеспечивающая прекращение выполнения цикла при падении давления.
Схема на рис. 3.16 обеспечивает прекращение цикла при падении давления в сети ниже допустимого. При нормальном рабочем давлении в сети сжатый воздух через распределитель Р4 поступает на вход распределителя Р2. При кратковременном включении распределителя Р2 воздух попадает в правую полость управления распределителя Р3, переключая его, что приводит к выдвижению штока цилиндра. По завершении перемещения штока оператор нажимает на кнопку распределителя Р1, который направляет сжатый воздух в левую полость управления распределителя Р3, переключая его, что приводит к втягиванию штока цилиндра. По завершении перемещения штока оператор нажимает на кнопку распределителя Р1, который направляет воздух в левую полость управления распределителя Р3, и шток цилиндра возвращается в исходное положение. Если при выдвижении штока цилиндра давление в пневмосети падает ниже допустимого значения, определяемого настройкой усилия возвратной пружины распределителя Р4, последний переключается и подает сигнал через клапан ИЛИ К на переключение распределителя Р3 и возврат штока цилиндра в исходное положение.
Глава. 4. Основы расчета параметров
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 2634; Нарушение авторских прав?; Мы поможем в написании вашей работы!