КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пневмоприводов
|
|
|
|
Структурные схемы дискретных и позиционных
Классификация пневматических приводов.
Пневматические приводы можно классифицировать по следующим признакам:
1) по роду движения выходного звена – поступательные, вращательные и поворотные;
2) по способу регулирования – с ручным и автоматическим управлением;
3) по задачам регулирования – стабилизированные, программные и следящие;
4) по виду источника энергии - компрессорные, магистральные, аккумуляторные.
Наибольшее применение получили пневмоприводы поступательного движения, в которых имеются пневмоцилиндры. В приводах вращательного движения применяют пневмомоторы. Реже применяют приводы поворотного движения с поворотными пневмодвигателями.
В отличие от гидроприводов пневматические приводы относятся к системам с дроссельным регулированием, в которых регулирование скорости движения выходных звеньев пневмодвигателей осуществляется с помощью дросселей или дросселирующих распределителей, поскольку изменять расход за счет изменения производительности компрессора неперспективно из-за высокой сжимаемости газа. Пневмоприводы относятся к системам с разомкнутой циркуляцией рабочего тела, т.к. отработанный газ (сжатый воздух) отводится по выхлопным линиям непосредственно в атмосферу.
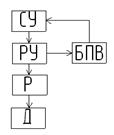
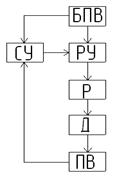
Дискретным пневмоприводом будем называть привод, двигатели которого работают в двухпозиционном режиме. В разомкнутой схеме дискретного пневмопривода (рис. 3.1) сжатый воздух из блока подготовки воздуха (БПВ) поступает на вход распределительного устройства (РУ), которое в соответствии с командами (сигналами) от системы управления (СУ) сообщает рабочие полости двигателя (Д) с источником давления или атмосферой. Скорость перемещения выходного звена пневмодвигателя изменяют с помощью устройства регулирования (Р). Путевой выключатель (ПВ) обеспечивает путевой контроль перемещения выходного звена двигателя или ведомого им рабочего органа механизма (рис. 3.1 а, б).
а) б) в)
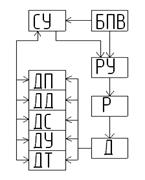
Рис. 3.1. Структурные схемы дискретных пневмоприводов: а) разомкнутая, б) с путевым контролем, в) с контролем закона движения и техническим диагностированием.
При необходимости контроля закона движения, положения выходного звена и технического диагностирования дискретный пневмопривод может быть оснащен комплектом датчиков (рис. 3.1 в): положения (ДП), давления (ДД), скорости (ДС), ускорения (ДУ), температуры (ДТ) или другими.
Существующие структурные схемы позиционных пневмоприводов можно разделить на два класса: разомкнутые позиционные приводы с упорами (рис. 3.2) и замкнутые позиционные приводы с датчиками перемещения (рис. 3.3). Поступающий из блока подготовки воздуха (БПВ) сжатый воздух в соответствии с сигналами от системы управления (СУ) через распределительное устройство (РУ) поступает в рабочие полости пневмодвигателя Д. Положение выходного звена двигателя определяется комбинацией выходных сигналов СУ, поступающих на входы блока упоров (БУ) (рис. 3.2). В замкнутом позиционном приводе энергией, подаваемой к двигателю (Д) из БПВ, управляет РУ в соответствии с входными сигналами от СУ, поступающим на входы распределительного устройства через сравнивающее устройство (УС). Последнее управляет распределительными устройствами при наличии рассогласования между сигналами управляющего устройства и датчика обратной связи (ДОС), связанного с выходным звеном пневмодвигателя или рабочим органом (РО) ведомого механизма (рис. 3.3).
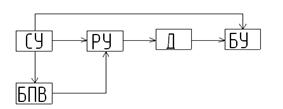
Рис. 3.2. Структурная схема разомкнутого позиционного пневмопривода.
Для повышения выходных характеристик позиционного привода в его состав вводят дополнительные системы позиционирования (СП). На рис. 3.3 структурные связи дополнительной системы позиционирования показаны штриховой линией. Дополнительные системы позиционирования по сигналам от СУ обеспечивают торможение, фиксацию или стопорение пневмодвигателя или РО в заданной точке.[8]
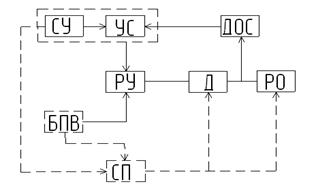
Рис. 3.2. Структурная схема замкнутого позиционного пневмопривода.
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 2581; Нарушение авторских прав?; Мы поможем в написании вашей работы!