КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Наблюдаемость
|
|
|
|
Наблюдаемость систем управления.
 Рассмотрим линейные системы, динамика которых описывается дифуранением n – порядка. В этом случае состояние системы будет определятся n – координатами. Эти координаты состояния системы не обязательно будут совпадать с физическими величинами, в т.ч. и с выходными координатами.
Рассмотрим линейные системы, динамика которых описывается дифуранением n – порядка. В этом случае состояние системы будет определятся n – координатами. Эти координаты состояния системы не обязательно будут совпадать с физическими величинами, в т.ч. и с выходными координатами.
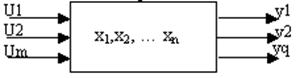
Система может описываться через входные и выходные величины или через координаты состояния.
В общем случае обозначение выходной управляющей величины через y от 1 до q.
Входные координаты обозначаются через U от 1 до m.
В качестве системы можно рассмотреть либо замкнутую САУ, тогда координаты U будут играть роль задающих воздействий G.
Либо сложно управляемые объекты, тогда величина U будет являться управляющим воздействием со стороны регулятора. Уравнение динамики линейной системы можно представить в виде:

c = cx (2) – в такой записи х – координата состояния системы.
Непосредственно наблюдается величинами, являющимися выходными величинами y, которые можно измерить.
Наблюдаемостью системы - называют такое её свойство, когда путём её наблюдения или измерения её выходные величины y(t) при заданных входных управлениях U(t) на интервале времени 0 £ t ³ T можно определить все координаты начального состояния системы х. В этом случае система будет полностью наблюдаемой.
Система будет не полностью наблюдаемой если через измерение выходной величины определяются не все координаты начального состояния системы.
Пусть система уравнений задана в формуле (1) и (2). Следуя теореме Калмана составляем матрицу n*nq.
Матрица имеет вид. Н = [CT |ATCT |(AT)2CT| …| (AT)n-1CT]
Система будет полностью наблюдаемой если ранг матрицы Н будет = n. n – порядок матрицы А.
Система будет не полностью наблюдаемой если ранг матрицы Н r<n. Можно выделить наблюдаемую часть которая будет иметь порядок r. В том случае, когда имеется одна измеряемая величина y матрица С будет иметь одну строку, а транспортируемая матрица – один столбец.
Для полной наблюдаемости требуется чтобы матрица состояла из одних нулей.
С точки зрения управляемости и наблюдаемости нельзя в передаточных функциях сокращать одноимённые сомножители и переставлять сомножители местами.
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 608; Нарушение авторских прав?; Мы поможем в написании вашей работы!