КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Моменты инерции тел правильной геометрической формы
|
|
|
|
Адаптивные системы управления. Классификация адаптивных САУ.
Адаптивные – приспосабливающ-ся. Задачи создания АСАУ по постановке близки к задачам оптимального управления, здесь так же требуется отыскать управ-щее возд-ее и алгоритм упр-ия, к-ый обеспечивает экстремальные значения выбранного критерия. Здесь так же ставится цель наилучшего управления. АСАУ могут рассматриваться как сис-мы с элементами искусственного интилекта. Назначение АСАУ состоит в том, чтобы заменить человека-оператора при принятии решений об улучшении характеристик сис. В процессе нормальной эксплуатации.
Некоторые объекты или технологические процессы отличаются тем, что их статические и динамические хар-ки изменяются в широких пределах непредвиденным заранее образом. Оптимальное упр-ие такими объектами возможно с помощью сис. В к-ых недостающая инф-ия автомотически пополняются самой сис-ой в процессе работы.
Классификация:
Системы дуального упр-ия - сис. в к-ых рабочий сигнал исп-ся двояко: для обеспечения функционирования; для приспособления к условиям внешней среды.
Самонастраивающиеся –(сис с парам-кой адоптацией) использую текущую инф-ию о хар-ах внешних воздействий и о динамических хар-ах объекта эти сис-ы осущ-ют контролируемые изменения пар-ов регулятора, что обеспецивает улучшения качества функц-ия сис-мы.
Самоорганизующиеся – (функционально-адаптивные) уменьшение априорной определенности достигается в них путем исп-ия инф-ии, получаемой в ходе непрерывного измерения доступных вх. И вых. Сигналов.
Самообучающиеся – информация о неизвестных хар-ах процесса и окр. Среды вырабатываются ими в ходе обучения, эта инф-ия в дальнейшем исп-ся для оценивания и принятия соответствующих решений с целью улучшения качества работы сис-мы.
Пассивные - в этих сис-х контролирование изменения пар-ов или хар-к осущ-ся программно, к-ая составляется на основе априорной инф-ии на стадии проектирования сис, априорная – инф-ия о внешних и внутренних воздействий.
Активные – в актив-х сис контролируемые изменение собственных хар-к осущ-ся не только на основе априорной информации но и в зависимости от текущей инф-ии об условиях работы сис-мы.
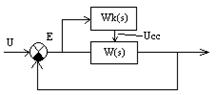 Разомкнутые – самонастройка проходит с учетом изменения хар-к сис и вх-го сигнала. Текущая инф-ия об этих изменениях получается на основе сигнала ошибки. Самонастройка выполняется дополнительным корректир-им устр-ом Wk(S), к-ый вкл-ся, например, когда сигнал ошибки превышает заданное пороговое значение, т.е. это сис обнаруживает изменения вх сигнала при наличии шумов или изменения парам-ов сис-мы.
Разомкнутые – самонастройка проходит с учетом изменения хар-к сис и вх-го сигнала. Текущая инф-ия об этих изменениях получается на основе сигнала ошибки. Самонастройка выполняется дополнительным корректир-им устр-ом Wk(S), к-ый вкл-ся, например, когда сигнал ошибки превышает заданное пороговое значение, т.е. это сис обнаруживает изменения вх сигнала при наличии шумов или изменения парам-ов сис-мы.
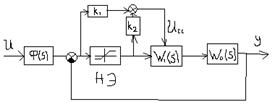 Замкнутые – (АСАУ с замкн. Циклом настройки) они отлич-ся от разомкн-х наличием допол-го замкнутого контура самонастройки, этот контур служит для анализа эффекта изменения качества Эта автокол-ая сис с НЭ в прямой цепи. Эта сис обладает способностью изменять передаточный коэф-т прямой цепи т.о. чтобы обеспечить оптимальный процесс управления.
Замкнутые – (АСАУ с замкн. Циклом настройки) они отлич-ся от разомкн-х наличием допол-го замкнутого контура самонастройки, этот контур служит для анализа эффекта изменения качества Эта автокол-ая сис с НЭ в прямой цепи. Эта сис обладает способностью изменять передаточный коэф-т прямой цепи т.о. чтобы обеспечить оптимальный процесс управления.
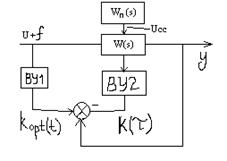 Аналитические – АСАУ, к-ая само подстраивается к изменению хар-к вх сигнала. Вх сигнал сумма полезного сигнала U и случ помехи f. Этот вх сигнал одновременно подается на вход вычислительного устр-ва ВУ1. пусть хар-ки составляющих вх сигнала заранее не известны, но априорные инф-ие о них имеются. Такая сис работает след образом вычисл устр-во ВУ1 оценив пар-ры полезного вх сигнала U(t) формирует имп-ую передат ф-ию (ИПФ) kopt(t). Эта ИПФ сравнивается с ИПФ сис, к-ая вырабатывается ВУ2. на основе этого сравнения происходит подстройка, т.е. формируется сигнал Ucc и на основе этого сигнала происходит сближение kopt(t) и k(t). Если неконтролир-ые пар-ры изменяются, то процесс самонастройки повторяются.
Аналитические – АСАУ, к-ая само подстраивается к изменению хар-к вх сигнала. Вх сигнал сумма полезного сигнала U и случ помехи f. Этот вх сигнал одновременно подается на вход вычислительного устр-ва ВУ1. пусть хар-ки составляющих вх сигнала заранее не известны, но априорные инф-ие о них имеются. Такая сис работает след образом вычисл устр-во ВУ1 оценив пар-ры полезного вх сигнала U(t) формирует имп-ую передат ф-ию (ИПФ) kopt(t). Эта ИПФ сравнивается с ИПФ сис, к-ая вырабатывается ВУ2. на основе этого сравнения происходит подстройка, т.е. формируется сигнал Ucc и на основе этого сигнала происходит сближение kopt(t) и k(t). Если неконтролир-ые пар-ры изменяются, то процесс самонастройки повторяются.
Поисковые – в этих АСАУ опред-ие значений контролируемых параметров осущ-ся в рез-те поиска, т.е. ищется экстремум ф-ии качества, при этом поиск осущ-ся в такой области, в к-ой положение рабочей точки обеспечивает требуемые статические и динамические хар-ки сис.
Момент инерции является мерой инертности тела при вращательном движении. Он играет такую же роль, что и масса при описании поступательного движения. Но если масса считается величиной постоянной, то момент инерции данного тела зависит от положения оси вращения
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 1289; Нарушение авторских прав?; Мы поможем в написании вашей работы!