КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Введення
|
|
|
|
У динаміці вивчаються механічні рухи матеріальних об'єктів під дією сил. Найпростішим матеріальним об'єктом є матеріальна точка.
Матеріальна точка – це модель матеріального тіла будь-якої форми, розмірами якого можна знехтувати і прийняти за геометричну точку, що має певну масу.
Більш складні матеріальні об'єкти –- механічні системи і тверді тіла –, складаються з набору матеріальних точок.
Рух матеріальних об'єктів завжди відбувається в просторі відносно певної системи відліку і в часі. Простір вважається тривимірним евклідова простору, властивості якого не залежать від рухомих в у ньому матеріальних об'єктів.
Час в у класичній механіці не пов'язаний з простором і рухом матеріальних об'єктів. У всіх системах відліку, рухомих один до відносно одного, воно він протікає однаково.
Аксіоми класичної механіки
Перша аксіома або закон інерції. Матеріальна точка, на яку не діють сили або діє рівноважна система сил, має здатність зберігати свій стан спокою або рівномірного і прямолінійного руху щодо інерційної системи відліку.
| m |

|

|
| Рисунок 17.1 |
Рівномірний і прямолінійний рух точки називається рухом по інерції.
Друга аксіома, або основний закон динаміки. Прискорення матеріальної точки відносно інерційної системи відліку пропорційно пропорційнеприкладеногоій до точки силі і та направлено напрямлено по цій силі:.
 .
.
Позитивний коефіцієнт пропорційності m, характеризує інертні властивості матеріальної точки і називається масою точки.
Маса не залежить від характеристик руху точки і від природи сил. Маса вважається постійною величиною і залежить тільки від самої матеріальної точки.
Сила, прикладена до матеріальної точки, завжди має матеріальний матеріальне джерело у вигляді інших матеріальних тіл, які діють на точку шляхом контакту при безпосередньому зіткненні з нею або на відстані через посередництвом силових полів.
Третя аксіома, або закон про рівність сил дії і протидії. Сили взаємодії двох матеріальних точок рівні за величиною і протилежні за напрямком:.
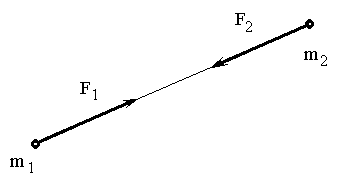
| Рисунок 17.2 |
 .
.
Четверта аксіома, або закон незалежної дії сил. При одночасовій одночасній дії на матеріальну точку декількох сил прискорення точки відносно інерційної системи відліку від дії кожної окремої сили не залежить від наявності інших, доданих до точки, сил та повне прискорення одно векторної сумі суми прискорень від дії окремих сил.
 ,
,  .
.
Аксіоми класичної механіки добре узгоджуються з результатами дослідів.
Системи одиниць
| СГС | Си | Техніическаяна | |
| [L] | см | м | м |
| [M] | г | кг | Т.е.м. |
| [T] | сек | сек | сек |
| [F] | дина | Н | кГ |
| [v] | см/сек | м/сек | м/сек |
| [a] | см/сек2 | м/сек2 | м/сек2 |
| [L] |
1 кГ = 9.8 Н, 36 км/час = 10 м/сек,
1 Т.е.м. = 9.8 кг
Диференціальні рівняння руху точки.
Основне рівняння динаміки  можна записати так
можна записати так  або так
або так  .
.
Проектуючи рівняння  на осі координат, отримуємо
на осі координат, отримуємо
 ,
,  ,
,  ,
,
так якоскільки  ,
,  ,
,  , то
, то
 ,
,  ,
,  .
.
Окремі випадки:
А) Точка рухається в площині. Вибираємо в площині координати xOy, отримуємо , ,  .
.
Б) Точка рухається по прямій. Вибираємо на прямий координату Ox, отримуємо ,  , .
, .
Основне рівняння динаміки  можна спроектувати на природні рухливі рухові осі.
можна спроектувати на природні рухливі рухові осі.

Ця форма рівнянь зручна для дослідження деяких випадків польоту снарядів і ракет:.
Основні задачі динаміки
| Рисунок 17.3 |
Відома Відомі маса точки і закон її руху, необхідно знайти діючу на точку силу, що діє на точку.
m 
 .
.
Обчислюємо другі похідні за часом від координат точки, множимо їх на масу і отримуємо проекції сили на осі координат:
 ,
,

 ,
,
Знаючи проекції сили на осі координат, визначаємо модуль сили та її на-напрямнихі косинуси:
 ,
,
 .
.
Приклад 1:. Рух точки в площині xOy визначається рівняннями:
 ;
;  ;
;  ;
;  час.
час.
Рішення:Розв’язання:
 ;
;
 ;
;
 ;
;  ;.
;.
 .
.
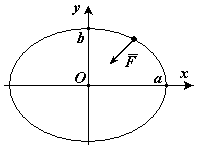
Рівняння траєкторії в координатній формі (еліпс):.
 ;
;
 ;
;
 .
.
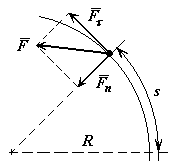
Приклад 2.: Крапка, що має масу  , рухається зі стану спокою по колу радіуса з постійним дотичним прискоренням
, рухається зі стану спокою по колу радіуса з постійним дотичним прискоренням  .. Визначити діючу на точку силу,що діє на точку в момент, коли вона пройде по траєкторії відстань.
.. Визначити діючу на точку силу,що діє на точку в момент, коли вона пройде по траєкторії відстань.  .
.
РішенняРозв’язання: Застосовуючи диференціальні рівняння руху точки в проекції на природні вісіосі, маємо:
| Рисунок 17.4 |
 ;
;
 ;
;
 ;
;
Так якОскільки  , то
, то  ,
,  ;
;
;  ;
; 
 ;
;
отже  ;
;  ; отже
; отже

 .
.
Друга задача або зворотне зворотна завданнязавдача:
Відома Відомі маса точки і діюча на точку сила, що діє на точку, необхідно визна-чити закон рух цієї точки.
Розглянемо рішення розв’язання цієї задачі в декартовій системі координат. Сила залежить від часу, координат точки, її швидкості та інших причин:.
 ,
,  ,
,  .
.
З теорії звичайних диференціальних рівнянь відомо, що рішення розв’язання одного диференціального рівняння другого порядку містить дві довільні постійністалі. Для випадку системи трьох звичайних диференційних рівнянь другого порядку є шість довільних постійнихсталих:  .
.
Кожна з координат  рухається, точки після інтегрування системи рівнянь залежить залежать від часу і всіх шести довільних постійнихсталих, тобто
рухається, точки після інтегрування системи рівнянь залежить залежать від часу і всіх шести довільних постійнихсталих, тобто
 ,
,
 ,
,

До цих рівнянь необхідно додати початкові умови:
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Використовуючи ці початкові умови можна отримати шість алгебраїчних рівнянь для визначення шести довільних постійнихсталих.
.
Основні види прямолінійного руху точки
Диференціальне рівняння прямолінійного руху точки вздовж осі Оx має вигляд:
 , Початкові умови: ,
, Початкові умови: ,
.
Найбільш важливі випадки.
1. 1.Сила постійна.
 ,
,  ,
,  .
.
Маємо рівнозмінний рівно змінюваний рух (рух із постійним прискоренням).
2. 2.Сила залежить від часу 
 ,
,
 ,
,  .
.
3. 3.Сила залежить від координати або швидкості.
Силу, що залежить від координати х  ,, створюють пружні тіла при їх деформації (наприклад, стиснута або розтягнута пружина). .
,, створюють пружні тіла при їх деформації (наприклад, стиснута або розтягнута пружина). .
Сила, що залежить від швидкості руху  , – це сила опору (повітря, води і т. д.)
, – це сила опору (повітря, води і т. д.)
У цих випадках рішення завданнярозв’язання задачі спрощується.
Лекція 18
Короткий зміст: Вільні коливання без опору. Поняття про фазову площину. Вільні коливання в полі постійної сили. Паралельне включення пружних елементів. Послідовне включення пружних елементів. Вимушені коливання без сопротивленияопору. Резонанс. Вільні коливання з в'язким опором. Вимушені коливання з в'язким опором.
Вільні коливання без опору
Існують пристрої (пружні елементи), які створюють силу, пропорційну їх подовженню.  ., Цю силу називають поновлюючою поновлювальну або центральною силою. Коефіцієнт пропорціональності називається жорсткістю пружного елементуелемента.
., Цю силу називають поновлюючою поновлювальну або центральною силою. Коефіцієнт пропорціональності називається жорсткістю пружного елементуелемента.
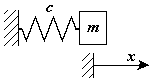
| Рисунок 18.1 |
 або
або  ,
,  .
.
Початкові умови мають вигляд: при 
 ,
,  .
.
Це диференційне диференціаль рівняння вільних коливань матеріальної точки без опору.
Характеристичне рівняння має вигляд:  .
.
Корені характеристичного рівняння рівні:  .
.
Рішення Розв’язок має вигляд:  ,
,
 ,
,
 ,
,  ,
,


 – амплітуда коливань;
– амплітуда коливань; 
 - – кругова колова, або циклічна частота коливань (власна частота). Вимірюється в:
- – кругова колова, або циклічна частота коливань (власна частота). Вимірюється в:
 - фазовий кут (чи просто фаза);.
- фазовий кут (чи просто фаза);.
 – період коливань;.
– період коливань;.
 – частота коливань (1 кол./cек=1 Гц).
– частота коливань (1 кол./cек=1 Гц).
| Рисунок 18.2 |
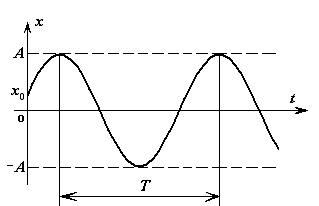
Рух матеріальної точки - – це вільні гармонійні гармонічні коливання з постійною амплітудою. Амплітуда коливань залежить від початкових умов і кругової колової частоти.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 633; Нарушение авторских прав?; Мы поможем в написании вашей работы!