КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приклад
|
|
|
|
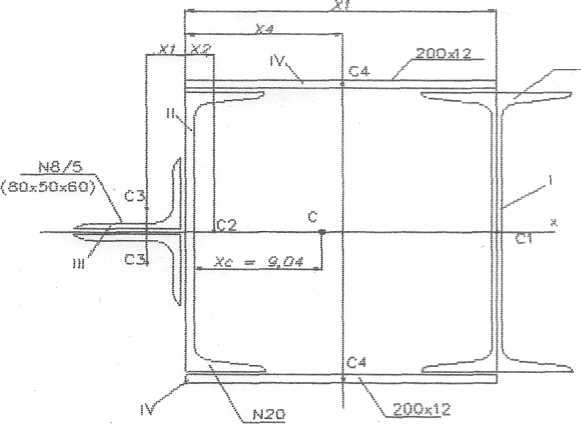
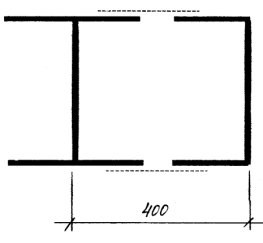
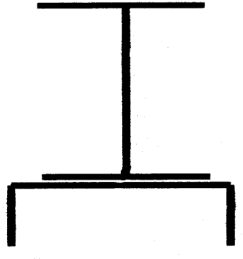
Визначити положення центра ваги складного перерізу, показаного на рис. 10. (використовувати таблиці сортаменту прокатних профілів).
Рішення:
1. Розіб'ємо перетин на профілі прокату.
|
Рис. 10
І - двотавр № 20
ІІ - швелер № 20
ІІІ - два неравнобоких кутки 80*50*6
ІV - дві смуги 12x200 мм
2. Укажемо центри ваги кожного профілю.
І - двотавр із центром ваги С1
ІІ - швелер із центром ваги С2
ІІІ - два неравнобокі кутки із центром ваги СЗ
ІV - дві смуги із центром ваги С4.
3. Оберемо систему координатних осей.
Положення координатних осей приймаємо в такий спосіб: вісь X сполучаємо з віссю симетрії перетину; вісь У проводимо перпендикулярно осі X по зовнішній грані стінки швелера.
4. Визначимо координати центра ваги всього перерізу.
Координата ус = 0, тому що вісь X збігається з віссю симетрії. Необхідно визначити лише координату центра ваги хс по формулі хс = Sy/A, де Sy - статичний момент щодо осі Y. Визначаємо з відповідних таблиць сортамента площі профілів і, використовуючи розміри, знаходимо абсциси їхніх центрів ваги;
І – А1=26,8 см2 х1=Іполоси=20см
ІІ – А2=23,4 см2 х2=z0=2,07см
ІІІ – А3=27,55 см2 x3=y0=-2,65см
ІV – А4=2х(1,2х20)=48 см2 x4= Іполоси/2=10см
5.Повна площа перетину:
А = А1+А2+А3 х2+А4х2 = 26,8 + 23,4 + 15,2+ +48 = 113,3 см2
6.Знаходимо статичний момент перетину:
Sy = А1х1+А2х2+А3х3+А4х4 =
= 26,8*20 + 23,4*2,07 + 15,l*(-2,65) + 48*10 = 1024,42 см3
7.Визначаємо координати центра ваги
хс =Sу/A = 1024,42см3 /113,3см2 = 9,04см
8.Отже точка С має координати 9,04; 0.
Наносимо знайдений центр ваги на малюнок перерізу.
Питання для самостійного вивчення:
1. Рішення задач на визначення положення центра ваги перерізів, складених із простих геометричних фігур або стандартних профілів прокату.
Література:
1. Бычков Д.В., Миров И.О. Теоретическая механика, М.: Высшая школа, 1973 с.108-114
2. Сетков В.Я. Сборник задач для расчетно-графических работ по технической механике. М.: 1988 с. 22 – 30
3. Сортамент прокатних профілів
ПРАКТИЧНЕ ЗАНЯТТЯ№ 16
Дивись Методичні вказівки до розрахунково-графічних робіт
з дисципліни «Теоретична механіка»
РОЗРАХУНКОВО-ГРАФІЧНА РОБОТА№ 4
Тема: Визначення координат центру ваги перерізу,
складеного з прокатних профілів.
Мета: Закріпити теоретичні знання з теми «Центр ваги тіла». Навчитися розв’язувати задачі за допомогою формул для визначення центру ваги складних перерізів.
Теоретичне обґрунтування:
В будь-якій точці фізичного тіла діє сила тяжіння. Через невеликі розміри тіл, що розглядаються, у порівнянні з відстанню їх до центру Землі, сили тяжіння розглядають як систему паралельних сил. Рівнодіючу сил тяжіння точок тіла називають силою тяжіння, а точку її прикладання – центром тяжіння (або центром ваги тіла)
Координати центру тяжіння тіла визначають за формулами:
 ;
; 
Координати центру тяжіння тіла, що складається з площин, визначають за формулами:
 ;
; 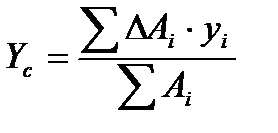
Добуток площі тіла на відстань від центра тяжіння цього тіла до осі зветься статичним моментом тіла відносно осі.
 ;
;  .
.
Література:
Сетков В.Я. Сборник задач для расчетно-графических работ по технической механике. М.: 1988. с.3-29, 124-127
ЛЕКЦІЯ № 17
Тема 1.7 Стійкість рівноваги
План лекції
1. Стійкість рівноваги. Види рівноваги.
2. Умови статичної рівноваги твердого тіла.
3. Момент перекидний і момент утримуючий. Коефіцієнт стійкості.
1. Стійкість рівноваги. Види рівноваги.
СТІЙКІСТЬ РІВНОВАГИ - здатність механічної системи, що
перебуває під дією сил в рівновазі, після незначного відхилення повертатися в положення рівноваги.
Стійкістю називається здатність споруд зберігати своє початкове
положення або первісну форму рівноваги в деформованому стані при дії зовнішніх сил.
Види рівноваги:
- стійка, при малому відхиленні тіла від положення рівноваги виникає сила, яка прагне повернути тіло в початковий стан.
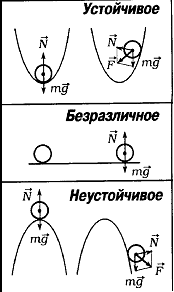
- нестійка, при малому відхиленні тіла з положення рівноваги виникають сили, які прагнуть збільшити це відхилення
- байдуже, при малому відхиленні тіло залишається в рівновазі.
Перехід споруди з стійкого стану до нестійкого називається втратою стійкості системи. Стан переходу називається критичним станом. А навантаження від зовнішніх сил, що діють на спорудження називаються критичними навантаженнями.
Розрізняють два види втрати стійкості:
- втрату стійкості положення (споруда не може далі зберігати своє положення, вимушено його змінити, наприклад, перекидання веж, гребель та т.ін)
- втрату стійкості, викликаної зміною форми рівноважного стану
(коли первісна форма деформації тіла стає нестійкою і тіло приймає іншу форму, яка суттєво відрізняється від первинної, наприклад, викривлення перерізів балки, випинання стиснутих стержнів і т.ін)
2. Умови статичної рівноваги твердого тіла.
Умовами рівноваги тіл є:
1) геометрична сума всіх сил, прикладених до тіла дорівнює нулю:

2) алгебраїчна сума моментів сил дорівнює нулю:

Важливі умови стійкої рівноваги:
1) принцип мінімуму потенціальної енергії
2) лінія дії сили тяжіння не повинна виходити за площу опори тіла
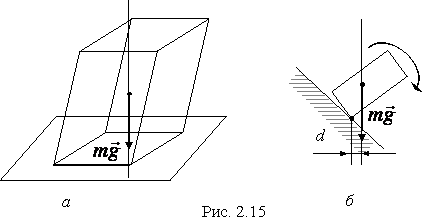
Однією з важливих умов стійкої рівноваги є принцип мінімуму потенціальної енергії – положенню стійкої рівноваги відповідає мінімальне значення потенціальної енергії порівняно з її значенням в найближчих сусідніх точках положення, які допускаються даними зв’язками.
Не менш цікавою та важливою умовою рівноваги системи (наприклад, будівлі – Пізанської вежі) є те, що тіло буде знаходитись у рівновазі, якщо лінія дії сили тяжіння не виходить за площу опори тіла (рис. а). В іншому випадку виникає обертальний момент сили та споруда може перекинутися (рис. б).
Розрахунок на стійкість за формулами Ейлера
Умови стійкості: σ = P/ F ≤ [σст] або P ≤ [P],
де [σст] – допустиме напруження на стійкість,
[P] - допустима стискувальна сила
[σст] = σкр / nст [P] = Ркр / nст
nст – коефіцієнт запасу на стійкість.
Для сталей nст = 1,8...3,0; для чавуну nст = 5,0...5,5
3. Момент перекидний і момент утримуючий. Коефіцієнт стійкості
Розглянемо умова збереження статичної стійкості тіла.
Припустимо, що фігура АВDЕ представляє перетин тіла вертикальною площиною, що проходить через його центр тяжіння С. Нехай Р, що лежить у цій площині і діє на тіло, прагне перекинути тіло навколо ребра Е.
Вага тіла G, очевидно, прикладена в центрі ваги С і направлена донизу. Так як G і Р – сили, що сходяться, то можна знайти їх рівнодіючу за правилом паралелограма. Якщо ця рівнодійна R пройде ліворуч від очки Е, то тіло буде зберігати статичну стійкість, якщо ж справа, то статична рівновага неможливо. У першому випадку момент рівнодіючої відносно точки Е буде негативний (обертає креслення проти годинникової стрілки), у другому - позитивний. Так як момент рівнодіючої дорівнює сумі моментів сил складових, то, отже, для рівноваги необхідно, щоб мало місце нерівність
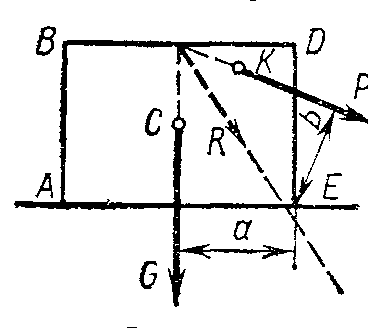
- Gа + Рb ≤ 0
де а і b - плечі сил G і Р відносно точки Е, звідки
Gа ً≥ Рb
Gа називається моментом стійкост і (утримуючим), Рb – моментом перекидним.
Отже, для збереження статичної стійкості тіла необхідно, щоб момент стійкості був більше перекидного моменту або в крайньому випадку дорівнює йому.
Відношення моменту стійкості до перекидного моменту, називається
коефіцієнтом стійкості
К = Gа ً/ Рb
Отже, коефіцієнт стійкості – це відношення суми всіх сил, які
утримують тіло у рівновазі, до суми усіх зрушувальних сил, що прагнуть вивести його з рівноваги.
Коефіцієнт стійкості, залежить від виду навантаження та граничних умов закріплення.
За коефіцієнтом стійкості можна судити про степені стійкості тіл під
дією даних сил. Тому визначення його значення є дуже важливим завданням, особливо при спорудженні таких будівель, як високі стіни, димові труби і пр.
Питання для самоперевірки
1. Що таке стійкість рівноваги?
2. Які існують види рівноваги?
3. Назвіть умови статичної рівноваги твердого тіла.
4. Формула Ейлера
5. Що є моментом перекидний і момент утримуючим7
6. Як визначити коефіцієнт стійкості?
Питання для самостійного вивчення:
1. Визначити коефіцієнт стійкості даного тіла
2. Виконання індивідуальних завдань.
Література:
Бычков В.Д. и Миров М.О. Теоретическая механика, с.120-125
ЛЕКЦІЯ № 18
Тема: Рішення задач. Підбиття підсумків по розділу
теоретичної механіки «Статика». Контрольна робота
План лекції
1. Модульний контроль по розділу теоретичної механіки «Статика»
2. Рішення задач
3. Контрольний мінімум знань з розділу «Статика»
4. Алгоритми рішення задач
5. Контрольна робота
1. Питання модульного контролю з розділу «Статика»
1. Дати визначення поняттю «механіка»
2. Назвіть приклади механічного руху.
3. Значення механіки в будівництві.
4. Назвіть видатних вчених з історії механіки.
5. Що називається статикою?
6. В чому полягає відносний спокій та відносна рівновага?
7. Що зветься силою та в яких одиницях вона вимірюється?
8. Чим характеризується сила?
9. Які сили відносять до зовнішніх, а які до внутрішніх?
10. Які системи сил називають еквівалентними?
11. Яка сила зветься рівнодіючою?
12. Яка сила зветься урівноважуючою?
13. Які тіла називають вільними, а які невільними?
14. Сформулюйте аксіоми статики.
15. Які тіла називають вільними, а які невільними?
16. Що називають зв’язком?
17. Що зветься реакцією зв’язку?
18. Які види зв’язків ви знаєте (укажіть напрямки їх реакцій)?
19. Що зветься плоскою системою збіжних сил.
20. Що таке рівнодіюча для плоскої системи збіжних сил?
21. Які способи складання сил ви знаєте? Охарактеризуйте кожний спосіб та можливість його використання.
22. В якому випадку силовий багатокутник замкнутий?
23. Чи має значення послідовність розташування сил при побудові силового багатокутника?
24. Сформулювати умови рівноваги системи збіжних сил в графічній формі.
25. Сформулюйте теорему про три непаралельні сили, що знаходяться в стані рівноваги.
26. Що таке пара сил та до якої дії вона приводить?
27. Що таке момент та від чого залежить знак моменту?
28. Які пари сил називають еквівалентними?
29. Які ви знаєте властивості пар сил?
30. Чому слова «пара сил» можна замінити словом «момент» та навпаки?
31. Як складаються пари сил? Доказ теореми складання пар.
32. Що називають моментом сили відносно точки?
33. Що зветься плечем сили?
34. Як визначити знак моменту сили відносно точки?
35. В якому випадку момент сили відносно точки дорівнює нулю?
36. Чи зміниться момент сили відносно точки, якщо цю силу перенести по лінії її дії?
37. Яка пара зветься доданою?
38. Що таке центр приведення?
39. Напишіть та сформулюйте рівняння рівноваги плоскої довільної системи сил.
40. Які відомі випадки приведення плоскої системи сил?
41. Класифікація балок.
42. Види опорів балок та їх реакції.
43. Класифікація навантажень.
44. Що називають центром ваги?
45. Положення центру тяжіння твердого тіла.
46. Як обчислюють координати центра паралельних сил?
47. Що називається силою тяжіння?
48. За визначають координати центру ваги тіла для об’єму, тонкої однорідної пластини, лінії.
49. Координати центру ваги складних фігур.
50. Що таке сортамент?
51.Назвіть основні прокатні профілі, та їх характеристики.
2. Рішення задач
Задача 1 Определить реакции идеальных связей аналитическим способом
Задача 2 Определить опорные реакции балки

Задача 3 Определить координаты центра тяжести

3 Контрольний мінімум знань з розділу «Статика»
4 Алгоритми рішення задач
ЛЕКЦІЯ № 19
Тема 2.1 Кінематика. Основні поняття кінематики.
План лекції
1. Основні поняття кінематики.
2. Засоби завдання руху.
1.Основні поняття кінематики
Кінематика - це розділ теоретичної механіки, в якому вивчається
механічний рух тіл протягом часу.
В кінематиці розглядається механічний рух, без урахування впливу діючих на тіло зовнішніх сил.
Основне завдання кінематики:
визначити положення рухомого тіла в будь-який момент часу.
Для опису руху використовуються такі кінематичні характеристики:
- спокій – стан спокою (стабільності) твердого тіла
- рух — зміна положення кого-, чого-небудь унаслідок обертання, коливання, переміщення
- простір
- час
- відстань
- траєкторія - лінія, вздовж якої рухається тіло
- шлях - довжина ділянки траєкторії, пройденої тілом за даний проміжок часу
- переміщення - напрямлений відрізок прямої, що сполучає початкове положення тіла з його наступним положенням
- швидкість - відношення переміщення до часу, протягом якого воно відбувається
- прискорення - швидкість зміни швидкості
3міна положення тіла (або його частин) відносно інших тіл називається
- механічним рухом.
Всякий рух є відносним, оскільки в світі не існує абсолютно
нерухомого тіла. Тому для опису руху потрібно вказати на тіло, відносно якого рух здійснюється.
Тіло відліку і пов'язана з ним система координат називається
системою відліку.
Для багатьох задач неважливі розміри і форма тіла. Тіло, при описі
механічного руху якого нехтують його розміром, називається матеріальною точкою.
Лінія (безліч положень рухомої точки), по якій рухається тіло в
просторі, називається траєкторією.
В залежності від форми траєкторії рух розподіляється прямолінійний та криволінійний.
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 2778; Нарушение авторских прав?; Мы поможем в написании вашей работы!