КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Третье началоКТД известно как теорема Нернста [77,78], следствием которой является так называемый принцип недостижимости нуля абсолютной температуры. 2 страница
|
|
|
|
|
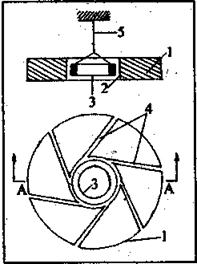
Рис. 28
Угол поворота зависит от упругости нити подвеса и материалов, из которых изготов-лено кольцо.
Таким образом, для объяснения экспериментов, фиксирующих отличную от законов Ньютона, напряженность гравиполя тел при перемещении по высоте или различное ускорение при «свободном» падении, нет необходимости привлекать гипотезу о «пятой силе». Эти различия обусловливаются неодинаковым сжатием перемещаемых по высоте тел или соответствующим торможением их в падении гравиполем Земли.
Отмечу еще раз, что всякое перемещение тела по высоте сопровождается изменением напряженности внешнего гравиполя, деформацией тела, а также изменением его энергетического состояния. Возникающая деформация увеличивает кинетическую энергию тела при опускании (тело, деформируясь, уменьшается, кинетическая энергия накапливается, потенциальная убывает). При подъеме же тела происходит его раздеформация, процесс накопления энергии меняется на противоположный. Именно взаимное превращение кинетической и потенциальной энергии при подъеме и опускании тела, связанное с деформацией, обусловливает механизм возвратно-поступательного движения маятника (рис. 29).
Маятник, тело-груз, подвешенное на невесомой нити в гравиполе Земли с неподвижной точкой закрепления О, при максимальном отклонении в точке А и симметричной ей точке В имеет наименьшую деформацию, а следовательно, и максимальную потенциальную энергию.
Рассмотрим структуру колебания маятника с неподвижной точкой подвеса О. На рис. 29 схематично показано движение маятника за один период. Оно складывается из двух одинаковых полупериодов АД и ВА. На схеме путь АВ разбит на 10 участков. Точки 1...11 первого полупериода показывают место нахождения маятника в каждую последующую единицу

|
Рис. 29
времени при движении от точки А в точку В. И соответственно, точки 11.... 21при движении от В к А. Из рис. 29 видно, что АВ и ВА полностью симметрич-ны. Так же симметричны АО1 и O1B. Маятник, выходя из точки А, за полный период проходит через все точки дважды (кроме точки 11). В каждой точке (кроме 1 и1l)маятник два раза имеет одинаковую по модулю скорость движения. Таким образом, структура движения маятника в обоих полупериодах одинакова. Она сохраняется при колебании в любой плоскости. Время колебания во всех последующих периодах равно первому.
Это внешняя картина наблюдаемого движения. Если же рассматривать колебания маятника как процесс взаимодействия грузика с гравитационным полем Земли, то каждый полупериод необходимо разделить на два такта, соответствующих стадиям деформации и раздеформации тела грузика в движении.
I такт. Когда в точке А грузик отпускается, то под действием внешнего гравиполя и нити в падении он начинает двигаться к точке О1. Движение определяется деформацией тела-грузика и накоплением кинетической энергии, которая в точке О1, достигает максимума. Здесь первый такт — деформация — заканчивается и начинается второй — раздеформация.
II т а к т. Перейдя точку О1 грузик, используя накопившуюся, кинетическую энергию, продолжает движение с раздеформацией до тех пор, пока в точке В вся кинетическая энергия не перейдет в потенциальную. Второй такт — раздеформация — закончился, и процесс повторяется в обратном порядке.
Все параметры колебания маятника сохраняются симметричными до тех пор, пока напряженность внешнего гравиполя остается горизонтально однородной, вертикально уменьшающейся с высотой. Само колебание маятника по своему характеру аналогично колебанию, вызываемому механическим растяжением пружины.
Равномерное или ускоренное перемещение подвеса с маятником в любом направлении нарушает однородность воздействия внешнего гравиполя на маятник, обусловливает асимметрию его колебания. Характер асимметрии определяет-ся процессом перемещения, вызывающим деформацию или раздеформацию как тела, маятника, так и окружающего гравитационного поля. А это означает, что состояния маятника с непод вижным или движущимся подвесам качественно различаются между собой, и это различия будет фиксироваться приборами, находящимися, например, внутри закрытой тележки. Ниже я использую асимметрию колебания для доказательства абсолютности всякого движения. Здесь же приведу описание и объяснения одного очень интересного эксперимента с маятником, проведенного И.М. Крюковым.
Почти четверть века назад И.М. Крюков сформулировал простенькую задачу о движении маятника, которая до настоящего времени ставит в тупик специалистов механиков, как теоретиков, так и экспериментаторов, своей кажущейся неразрешимостью. И это притом, что процесс колебания маятника представляется наиболее изученным механическим процессом, а элементы ответа на вопрос излагаются во всех учебниках физики.
Задача может быть сформулирована в следующей форме:
Как значительно (на десятки процентов) изменить эмпирический период колебания маятника, не изменяя длину его подвески и напряженности внешнего гравитационного поля?
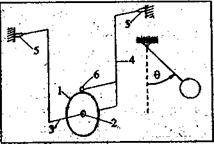
Если, согласно механике, принять что период колебания маятника определяется только этими двумя параметрами, то никаких способов его значительного изменения просто не может быть. И именно к такому выводу чаще всего приходят специалисты, рассматривая эту задачу. Однако такой вывод нельзя признать удовлетворительным, поскольку кроме вышеуказанных физических параметров существует и возможность изменения взаимного положения подвески и грузика маятника. Другими словами, грузик может быть неподвижным относительно подвески (иметь одну степень свободы) или свободно двигаться относительно ее, превращаясь в некоторое подобие ротора (иметь две степени свободы). И именно эта возможность оказывается фактором значительного варьирования периода колебания маятника. Рассмотрим, что происходит с периодом при колебании с одной и двумя степенями свободы. Имеем грузик 1на подшипнике 2установленном на оси 3(см. рис. 30). Подшипник 2обеспечивает возможность свободного поворота грузика относительно подвески 4, а сама подвеска 4 вращается в подшипниках 5. Устройство 6 – замок, который может заклинивать грузик, обусловливая ему в движении одну или две степени свободы. Покажем, в полном соответствии с ньютоновской механикой, что частота колебания при одной степени свободы будет значительно отличаться от частоты колебания того же маятника с двумя степенями свободы. Рассмотрим колебания маятника с одной степенью свободы. (Грузик заклинен, массой подвески пренебрегаем.) 1. Введем следующие обозначения: J – момент инерции грузика 1 относительно оси 3; m – масса грузика: l – длина подвески (расстояние от центра оси 3 до центра оси 5-5); Q – угол отклонения маятника; g – напряжённость внешнего грави- Рис. 30. тационного поля (ускорение свободного падения); Т3 – кинетическая энергия маятника с одной степенью свободы; Тn – кинетическая энергия маятника с двумя степенями свободы.
|
Отметим, что при колебании с одной степенью свободы грузик маятника участвует как в падении (изменение положения по высоте), так и в повороте вместе с подвеской 2 относительно гравиполя Земли и его кинетическая энергия определя-ется уравнением:
Т3 = JQ2/ 2 + тl2Q/ 2. (3.42)
Тогда функция Лагранжа будет равна:
L = (J + ml2) Ò /2 + mglсosO. (3,43)
Для O (t) имеем уравнение:
(J + ml2) Ö = – mglsinO. (3/44)
Если угол O мал, то уравнение (3.43) может быть записано иначе:
Ö + g/l·O/ (1 + J/ml2) = 0. (3.45)
И частота малых колебаний ω3 равняется:
ω3 = √(g/l (1 +J/ml2)] = (1 + J/mll2) 1/2√ g / l (3.46)
Это хорошо известное уравнение движения физического маятника.
2. При двух степенях свободы незакрепленный грузик в своем падении независим от вращения подвески (не поворачивается относительно гравиполя), следствием чего становится другая величина его кинетической энергии, потому будет иметь место иная частота колебания. Обозначим угловую скорость поворота грузика на оси 3 через к. Тогда кинетическая энергия Тк равна:
Тк = ml2Ò2/ 2 + J/ 2 к2, (3.47)
а функция Лагранжа;
L = ml2Ò2/ 2+ J/ 2 k2 + mglcosO. (3.48)
И для угла О получаем уравнение:
ml2Ö = mglsinO. (3.49)
Откуда находим частоту малых колебаний ω:
ωк = √g//l. (3.50)
А это (3.50) не менее известное уравнение движения математического маятника.
Однако в современной механике никакой физической связи между уравнениями (3.46) и (3.50), кроме подобия в форме записи, не просматривается и потому предполагается, что они описывают как бы различные виды движения. Что касается поворота грузика вокруг оси 3, то для угла поворота ω имеем уравнение:
d(Jк)/dt = 0.
Откуда, при угловой скорости поворота грузика равной углу поворота подвески, получаем: к = const.
Превращение маятника из физического в математический только за счет изменения степени свободы грузика, сопровождаемой изменением кинетической энергии колебания, при неизменной потенциальной энергии возможно только в том случае, если период колебания маятника определяется силовым взаимодействием с каким-то внешним полем и величина взаимодействия зависит от формы закрепления маятника.
Из формул (3.46) и (3.50) явствует, что единственным внешним силовым полем, которое может влиять на период колебания маятника, является гравитационное поле. В формулы входит напряженность гравитационного поля и, следовательно, только она определяет период колебания маятника при неизменной длине подвески, но с изменением способа его закрепления.
По логике рассуждения, принятой в ньютоновской механике, мы не можем перейти от (3.46) к (3.50), что и обусловливает как бы независимое существование в физике математического и физического маятников. Но такой переход должен наличествовать. Ибо это не две независимые формулы, отображающие различные движения маятника, а формализация одного процесса протекающего в различных условиях, определяемых формой его закрепления, а, следовательно, и взаимодействие маятника с гравитационным полем окружающего пространства. Формулы (3.46) и (3.50) отличаются на величину к, равную:
к = (1 +J/ml2)-1/2.
И создается впечатление, что эта величина к = const является постоянным параметром, поскольку включает в себя неизменные величины m, l, r. Поэтому предполагается, что между физическим и математическим (?) движением маятника существует некий необъяснимый скачок, например типа квантового.
Однако более вероятно, что механизм взаимодействия маятника с гравиполем обусловливает возможность постоянного изменения к в зависимости от движения подвески и грузика относительно осей 3 и 5. Исходя из этого можно провести преобразования, изменяющие формализацию коэффициента к, и получить следующую зависимость:
к = (1 + r2/ l2)1/2. (3.51)
И в числителе и в знаменателе дроби правой части (3.51) стоят радиусы грузика r и подвески l. Так как скорость вращения обода грузика равна произведению его радиуса на частоту, то в общем случае будем иметь для него скорость v1:
v1 = rω.
Откуда:
r = v1 / ω. (3.52)
И для подвески:
l = v/ω1. (3.53)
Поскольку в формулах (3.52) и (3.53) частота ω имеет, в случае физического маятника, одинаковую количественную величину, то, подставляя (3.52) и (3.53) в (3.50), находим зависимость коэффициента к от скорости поворота обода ротора относительно поворота подвески:
к = (1+ v12/v2)-1/2. (3.54)
И окончательно формула (3.46) имеет вид:
ω = √ g/l ·(1 + v12/v2)-1/2. (3.55)
Формула (3.55) показывает, что период колебания маятника обусловливается отношением квадрата скорости его поворота v1 к квадрату скорости поворота подвески v, а потому при жестком закреплении грузика, когда его скорость относительно подвески v1 = 0, мы имеем дело с математическим маятником, который с началом свободного поворота грузика превращается в физический. А это позволяет посредством изменения жесткости закрепления грузика варьировать период колебания маятника, как в сторону возрастания, так и в сторону замедления, что кажется невозможным по механике Ньютона.
Эксперименты с изменяемой степенью свободы маятника (а это и названо маятником Крюкова), проведенные в 1988 г. в ЦАГИ В.П. Якуниным и Н.Г. Панферовым, показали, что изменение степени свободы с одной на две меняет частоту колебания маятника на величину, превышающую 30%.
Теоретически можно показать; что максимальный период достигается только тогда, когда коэффициент становится равным к = √2 = 1,414...
Формула (3.55) свидетельствует о безразличном положении подвески относительно горизонта, а потому эксперимент с изменением степеней свободы ротора-грузика может иметь множество разновидностей, как бы не имеющих никакого отношения к маятнику.
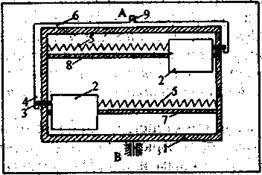
Один из вариантов вертикального закрепления роторов по обе стороны оси 5 описан в данной работе. Второй, не имеющий на первый взгляд никакого отношения к маятникам, предложен самим И. М. Крюковым и назван мною «Рамка Крюкова» [48]. Суть эксперимента заключается в следующем (рис. 31):
Внутри металлической рамки l, установленной на оси АВ в подшипниках, расположены планки 7 и 8 с грузиками 2, способными свободно перемещаться по планкам. Грузики с одной стороны прикреплены к боковинам рамки пружинами, а с другой имеют петли 3и, передвигаясь, растягивают пружины до крючков 4,которые и удерживают пружины в растянутом положении. Крючки 4 тягами 6 соединены со спусковой кнопкой 9. Если в таком положении (грузики имеют одну степень свободы) рамку раскрутить вокруг оси АВ (сообщить ей определенный момент количества движения) и оставить ее вращающейся, то до останова пройдет две-три минуты.
|
| Рис. 31 |
Если же после раскручивания, нажать кнопку 9 то освобожденные грузики 2 под действием пружин устремятся к оси АВ (грузики получают две степени свободы). Пока они сходятся к оси, рамка раскручивается в соответствии с «законом» сохранения количества движения. Но достаточно грузикам перейти ось АВ, как вращение рамки мгновенно тормозится почти до полной ее остановки. Грузики раздеформируются. Момент их импульса нейтрализуется, количество движения уменьшается и сохраняется только момент импульса рамки. «Закон» сохранения количества движения как бы нарушается, поскольку система останавливается за счет «внутренних» сил.
Все вышеописанное позволяет сделать следующие выводы:
• маятник является гравитационным прибором и характер его движения определяется способом деформации с гравитационным полем Земли:
• «физический и математический» маятники различаются эмпирически только количеством степеней свободы, а, следовательно, и способом взаимодействия с гравиполем.
3.4. Инерциальные и гравитационные
силы и массы
Провозглашение классической механикой эквивалентности инерциальной и гравитационной масс при распространении на взаимодействия логически приводит к заключению, что эффект, вызываемый ускорением, экспериментально невозможно отличить от аналогичного эффекта, вызываемого гравитационным притяжением. Этот эффект, используемый Д. Эйнштейном в построении теории гравитации, предполагает возможность рассмотрения в течение малого промежутка времени и в пределах небольшой области пространства гравитационного поля как приблизительно постоянного и однородного. Вот как иллюстрируется принцип эквивалентности в работе [61]:
«Предстают себе космическую ракету, пролетающую так далеко от гравитирующих тел — звезд или планет, что гравитационные силы, действующие на ракету, ничтожно малы. Пусть мощность ракетных двигателей подобрана так, чтобы ускорение, с которым движется ракета, в точности равнялось ускорению свободного падения g. На космонавта, который сидит в ракете, действует единственная сила — реакция опоры со стороны кресла N. Именно эта сила сообщает космонавту ускорение: согласно второму закону Ньютона N = mg, где т – инертная масса космонавта. Космонавт помнит, что перед стартом, когда ракета стояла неподвижно на Земле, на него со стороны кресла действовала сила N, уравновешивающая силу притяжения к Земле, т.е. N' = m'g. И в том, и в другом случае у космонавта создавалось ощущение, что какая-то сила вдавливает его в кресло. Если т = т', то N = N'. Значит, если гравитационная и инертная массы совпадают, то и в том и другом случае космонавт должен испытывать совершенно одинаковые ощущения: т.е. он, закрыв наглухо иллюминаторы, не смог бы угадать — неподвижна ли ракета, но вблизи есть тело, создающее гравитационное поле с напряженностью g, или гравитационное поле отсутствует, но ракета движется с ускорением g».
И далее следует сильный вывод: «никакой локальный эксперимент, т.е. эксперимент, проводимый в малой части пространства, в изолированной лаборатории, не позволяет отличить гравитационное поле от ускорения».
Уверенную аргументацию авторов, физиков-экспериментаторов по профессии, достаточно легко опровергнуть, предложив им провести простой эксперимент с маятником, помещенным вместо ракеты в обыкновенный лифт, движущийся с постоянным ускорением.
В своем движении лифт, изменяя положение точки закрепления маятника по высоте, а вместе с ней и напряженность внешнего гравиполя. воздействует на деформацию и раздеформацию тела-маятника, и, следовательно, на процесс перехода потенциальной энергии в кинетическую и наоборот. Отсутствие данного перехода приводит к быстрому затуханию колебания маятника. Поэтому в своем колебании тело маятника будет проходить один первый такт. Второй — раздеформация — зависит от количественной величины ускорения и при ускорении, превышающем проекцию амплитуды на вертикальную составляющую, наблюдаться не будет, что и зафиксирует наличие в кабине лифта инерциального поля. Таким простейшим способом не только космонавт, но и лифтер может достаточно быстро убедиться в том, что имеет дело не с мощным внешним гравитационным полем, а с движущейся ускоренно «изолированной» лабораторией.
Убеждение, что сила инерции и сила тяготения есть разные, но сводимые друг к другу силы, лежит в основе всех гравитационных теорий и сопровождается предложением иных мыслимых экспериментов, как бы подтверждающих принцип эквивалентности и способных создать условия, при которых силу тяготения невозможно отличить от силы инерции. Так в работе [62] предлагается следующий опыт по его подтверждению:
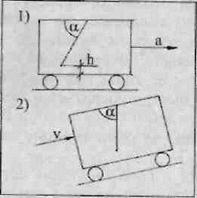
«Представим себе совершенно закрытый вагон, который движется по горизонтальному полотну дороги с постоянным ускорением (рис.32, 1). В таком вагоне отвес будет отклоняться от направления, которое мы на Земле называем вертикальным. Равнодействующая силы инерции и силы тяжести отклонит отвес к задней стенке вагона. В вагоне все будет так, как если бы вагон поднимался с постоянной скоростью в гору (рис. 32, 2). А величина силы тяжести равнялась бы сумме действительной сил тяжести и силы инерции в ускоренном, но горизонтально движущемся вагоне (понятно, что надо брать геометрическую сумму векторов). Так как в обоих случаях все тела получают совершенно одинаковые ускорения, нельзя узнать, что происходит с вагоном на самом деле: движется он равномерно в гору при увеличении силы тяжести или ускоренно по ровному месту, если пользоваться только приборами, регистрирующими вес, и не знать подлинной величины силы притяжения к Земле. Если за окнами будет темно, то никакого способа различить силы, нет. Сила притяжения к Земле и сила инерции проявят себя как физически тождественные».
|
Рис. 32
Данная задача сформулирована более хитро, чем эксперимент с ракетой, хотя заключение столь же категорично — нет способов различения инерции и гравитации. Автор задачи — теоретик помнит, что при движении с ускорением а вес тела меняется, и при длительном наблюдении в ускоренном вагоне это изменение буде зафиксировано. Вот почему нельзя пользоваться весами. По этой же причине второй вагон не стоит наклонно, а движется в гору с постоянной скоростью. В нем тоже будет наблюдаться эффект уменьшения веса.
Поскольку в классической механике свойства не зависят друг друга, то иных способов обнаружения состояния движения больше не предлагается, хотя таких способов множество. Простейший из них позволяет обнаружить движение вагона с ускорением с помощью обыкновенного метра. Для этого достаточно, оказавшись в вагоне, замерить расстояние h от пола до грузика отвеса. Подождав некоторое время, повторить замер, и если обнаружится изменение h, то, значит, вагон движется с ускорением. Если h осталось неизменным, вагон с равномерной скоростью поднимается в гору.
Более сложные эксперименты, например, с помощью зеркала и зайчика от направленного на него и отраженного на отдаленный экран луча света или с помощью интерферометра Майкельсона, позволяют, находясь в закрытом вагоне, визуально наблюдать его перемещение с ускорением в сантиметрах и даже в долях миллиметра, т.е. с меньшим, чем развивает улитка.
Чем же обусловлены столь серьезные заблуждения в понимании сути физических процессов, связанных с движением тел?
Эти заблуждения определяются постулативным характером начал механики, отсутствием системной взаимосвязи между ними, полным совпадением результатов теоретических расчетов элементов движения с экспериментальными данными и некоторой предсказательной способностью механики. В частности, при описании движения наличествуют следующие явные и неявные постулаты:
• рассматриваются отдельные свойства тел и их изменение при движении, а не взаимосвязанное изменение всех свойств;
• произвольно разделяются массы на инертную и гравитацион-ную, что искусственно раздваивает силы на инерциальные и гравитационные;
• предполагается тождественность тел в покое и движении;
• движение тела отрывается от эфирного пространства и гравитационного поля;
• постулируется неизменность и независимость пространства от тел, которые в нем движутся;
• предполагается возможность существования скорости без ускорения, отсутствие зависимости, как между ними, так и с движущемся телом;
• постулируется относительность прямолинейного и равномерного движения;
• вводятся искусственные инерциальные системы отсчета;
• и самое главное — отсутствует представление о том, что тело, неподвижное относительно пространства, качественно отличается от того же движущегося любым способом тела. И это отличие всегда можно зафиксировать приборами, находящимися внутри него.
Проиллюстрирую как, базируясь на вышеперечисленных постулатах, возникает неадекватное природе представление о сущности движения.
Сначала отмечу, что не все из перечисленных постулатов исторически принадлежат Ньютону. В частности, у него отсутствует понятие «инерциальные системы отсчета» как абстрактное «геометрическое и кинематическое определение, заключающее в себе нереалистическую идеализацию» [63] и описание событий в терминах этого понятия. В своей механике Ньютон использовал представление о коперниковой системе, отображающей реальное физическое пространство — вместилище, заполненное эфиром. Такое представление до некоторой степени напоминает понятие о месте Аристотеля. И именно поступательное движение тела относительно пространства, эфира и тел, находящихся в них без взаимодействия с первыми, становится у него движением по инерции. Неинерциальным оставалось движение с ускорением, и только потому, что оно обусловливалось либо воздействием внешних сил, либо вращением.
Введение последователями Ньютона представления об инерциальных системах отсчета стало деформацией ньютоновской механики, превращало эти системы в самостоятельные сущности, делало излишним представление о физическом пространстве и совсем ненужным понятие «эфир». Первым это заметил и сразу же отбросил эфир, как и эфирное пространство — Эйнштейн, сначала заменив пространство как реальность пустотой и координатными мнимостями, а затем инерциальными системами отсчета. И поэтому в современной физике вещественное пространство описывается не как телесное образование, взаимодействующее со всеми телами, а как абстрактное пустое вместилище, заполненное не взаимодействующими с пространством полями и телами.
В теории функции инертного пустого пространства приписаны мыслимым инерциальным системам отсчета. Прямым следствием введения инерциальных систем оказался произвольный отрыв движения тела от вещественного пространства и превращение последнего в инерциальную, первичную систему отсчета (в которой можно поместить неподвижного наблюдателя), а тела - во вторичную систему отсчета (в нее усаживается движущийся наблюдатель). Наблюдателей, как дополнение к инерциальным системам отсчета, впервые использовал Мах.Естественно, что наблюдатель понимает наблюдаемое событие не таким, каким оно происходит в природе, а таким, каким оно должно быть по той теории, приверженцем которой является ученый, посадивший этого наблюдателя (не случайно А.А Денисов наименовал их «зеваками» [64]). Являясь исполнителями субъективных устремлений ученого, они как бы выполняют функцию «независимого прибора», подтверждающего предлагаемые посылки, и потому наблюдатель в тележке не должен замечать взаимодействия движущегося тела с веществен-ным пространством, что до него и за него делает автор теории, превращая субъективные домыслы в «реальную» действительность и демонстрируя кажущуюся относительность этого движения.
Приведу еще один пример описания поступательного движения с ускорением тележки (вторичной системы) относительно инерциальной коперниковой первичной системы отсчета. По горизонтальным рельсам с пренебрежительно малым трением катится тележка (вторичная система отсчета), увлекаемая закрепленном на блоке грузом (рис. 33). На тележке массой т установлен отвес массой т'. Опускаемое под действием притяжения Земли тело М сообщает тележке постоянное ускорение. При этом отвес отклоняется в сторону, противоположную ускорению на угол α. Величина отклонения угла α определяется однозначно ускорением тележки относительно инерциальной системы отсчета и остается неизменной в последующем (?).
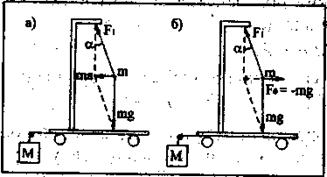
Рис. 33.
В этом рассуждении замаскирована ошибка. Она заключается в том, что тележка движется не относительно инерциальной системы отсчета, а относительно Земли. И если относительно мыслимой системы отсчета, с которой тележка, естественно, не взаимодействует, она кажется движущейся с постоянным нараста-нием скорости, не влияющей на ее физическое состояние (не меняющей ее качество). То при движении с постоянным ускорением по поверхности Земли изменение скорости движения сопровождается реальным изменением взаимодействия тележ-ки с Землей, которое и вызывает соответствующее изменение угла отклонения отвеса α, т.е. фиксируется новое качество тележки.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 398; Нарушение авторских прав?; Мы поможем в написании вашей работы!