КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Замкнутая система П-Д с отрицательной обратной связью по скорости двигателя постоянного тока независимого возбуждения
|
|
|
|
Замкнутые схемы управления электропривода с двигателямипостоянного тока
ЗАМКНУТЫЕ СХЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДА
| З |
амкнутые схемы управления ЭП применяются, когда требуется обеспечить движение исполнительных органов рабочих машин с высокими показателями качества – большим диапазоном регулирования координат и точностью их поддержания, заданным качеством переходных процессов, а также высокой экономичностью или оптимальным (наилучшим) функционированием технологического обо-рудования и самого ЭП.
Для обеспечения такого управления в структуру ЭП входит силовой управляемый полупроводниковый выпрямитель, регулятор напряжения, регулятор частоты, а схема управления строится с использованием об-ратных связей по регулируемым координатам (переменным). То есть, силовая часть такого ЭП имеет структуру «преобразователь – двига-тель», в которой двигатель питается от управляемого преобразователя.
Важной характеристикой большинства современных замкнутых сис-тем управления является возможность гибкой настройки их параметров, программирования и перепрограммирования алгоритмов управления ЭП, что обеспечивается применением микропроцессорных средств уп-равления. Использование МП средств позволяет повышать надежность функционирования ЭП и технологического оборудования за счет диаг-ностики при их работе, резервирования каналов управления и т.д.
Характеристики разомкнутых ЭП, построенных по системе «преобразователь – двигатель» (П-Д), имеют относительно невысокую жесткость из-за наличия внутреннего сопротивления преобразователя и самого двигателя. Кроме того, характеристики разомкнутой системы не обеспечивают точного регулирования (или ограничения) тока и момента. Для получения значительных диапазонов и высокой точности регу-лирования скорости требуется иметь более жесткие характеристики, которые можно подучить в замкнутой системе П-Д.
Основу системы составляет разомкнутая схема П-Д. На валу двига-теля находится датчик скорости ДС(рис.7.1,а), выходное напряжение ко-торого  , пропорциональное скорости двигателя, является сиг-налом ОС. Коэффициент пропорциональности носит название коэф-фициента ОС по скорости и может регулироваться за счет изменения тока возбуждения датчика скорости IВ. ДС
, пропорциональное скорости двигателя, является сиг-налом ОС. Коэффициент пропорциональности носит название коэф-фициента ОС по скорости и может регулироваться за счет изменения тока возбуждения датчика скорости IВ. ДС
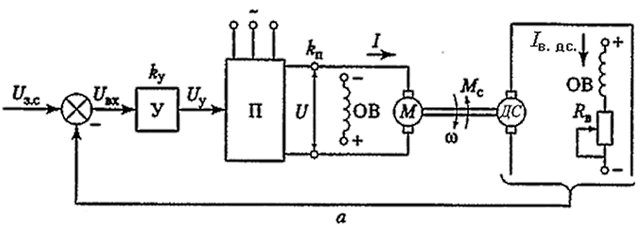
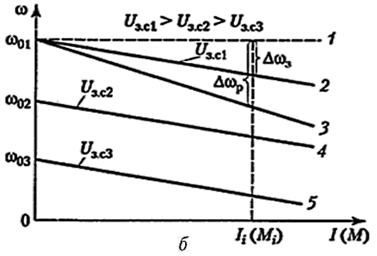
Рис. 7.1. Схема (а) и характеристики (б)замкнутой системы с обратной связью по скорости
Сигнал ОС UДС сравнивается с задающим сигналом скорости U3.С, и их разность в виде сигнала рассогласования (ошибки) UВХ подается на
вход усилителя У, который с коэффициентом kУ усиливает сигнал рас-согласования UВХ и подает его в виде сигнала управления UУ на вход преобразователя П, в качестве которого используется управляемый вып-рямитель. Усилитель в этой схеме является пропорциональным регуля-тором скорости.
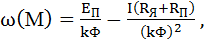
Для получения формул характеристик двигателя в замкнутой систе-ме воспользуемся выражениями для электромеханической ω(I) и меха-нической ω(М) характеристик двигателя в разомкнутой схеме и соот-ношениями, следующими из рассмотрения рис. 7.1,а:
 (7.1)
(7.1)
 (7.2)
(7.2)
 (7.3)
(7.3)
 (7.4)
(7.4)
 (7.5)
(7.5)
где Eп – ЭДС преобразователя; k – конструктивный коэффициент дви-гателя; Ф – магнитный поток двигателя; I – ток якоря двигателя; RЯ, Rn, – соответственно сопротивление якоря двигателя и преобразователя; М–момент двигателя.
Заменяя в (7.1) и (7.2) последовательно Enна ее выражение из (7.5), на его выражение из (7.4) и далее UВХ – на его выражение из (7.3), после несложных преобразований получаем следующие формулы для характе-ристик двигателя в замкнутой системе:
 (7.6)
(7.6)
 (7.7)
(7.7)
где  – общий коэффициент усиления замкнутой системы П-Д.
– общий коэффициент усиления замкнутой системы П-Д.
Для анализа жесткости получаемых характеристик сопоставим пере-пады скорости в разомкнутой ∆ωР и замкнутой ∆ω3 системах при одном и том же токе или моменте. Согласно (7.1), (7.2), (7.6) и (7.7), имеем
 , (7.8)
, (7.8)
 (7.9)
(7.9)
Так как kС>0, то ∆ω3<∆ωР, т.е. жесткость получаемых характеристик в замкнутой системе больше жесткости характеристик в разомкнутой системе. Характеристики, показанные на рис. 7.1,б,представляют собой прямые параллельные линии 2,4 и 5, расположение которых определя-ется уровнем задающего сигнала по скорости UЗ.С и соответственно ско-ростью ХХω0. Для сравнения приведена характеристика двигателя в ра-зомкнутой (прямая 3) системе.
Для нахождения предельной по жесткости характеристики устремим коэффициент усиления системы kС в бесконечность. Из (7.9) видно, что при  , т.е. в пределе может быть получена абсолютно жес-ткая характеристика рис. 7.1,б штриховая линия1.
, т.е. в пределе может быть получена абсолютно жес-ткая характеристика рис. 7.1,б штриховая линия1.
Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что двигатель работает под нагрузкой в установившемся режиме и по каким-то причинам увеличился момент нагрузки МС. Так как развиваемый двигателем момент стал меньше момента нагрузки, его скорость начнет снижаться, и соответственно бу-дет снижаться сигнал ОС по скорости . Это, согласно (7.3) – (7.5), вызовет увеличение сигналов рассогласования UВХи управления Uy и приведет к повышению ЭДС преобразователя, а следовательно, напря-жения и скорости двигателя.
При уменьшении момента нагрузки ОС действует в другом направ-лении, приводя к снижению ЭДС преобразователя. Таким образом, благодаря наличию ОС осуществляется автоматическое регулирование ЭДС преобразователя и тем самым подводимого к двигателю напря-жения, за счет чего получаются более жесткие характеристики ЭП.
Для получения жестких характеристик в системе П-Д, кроме ОС, по скорости используются также отрицательная ОС по напряжению и положительная ОС по току двигателя и их сочетания.
Схема управления, обеспечивающая ограничение тока и момента ДПТ с помощью нелинейной отрицательной ОС по току
В качестве датчика тока в схеме (рис. 7.2,а) используется шунт с сопротивлением RШ, сигнал ОС по току
 .
.
Работа УТО в соответствии с его характеристикой UОТ (I) (рис. 7.2, а) происходит следующим образом. При токе в якоре, меньшем заданного тока отсечки, т.е. пока  сигнал ОС на выходе УТО равен нулю. Схема в диапазоне тока 0... IОТС является разомкнутой и двигатель имеет характеристики рис. 7.2,б в зоне I.
сигнал ОС на выходе УТО равен нулю. Схема в диапазоне тока 0... IОТС является разомкнутой и двигатель имеет характеристики рис. 7.2,б в зоне I.
При I>IОТС на выходе УТОпоявляется сигнал ООСUО.Т = βI. ЭП становится замкнутым и начинает работать в зоне II (рис. 7.2,б). Для пояснения вида характеристик ЭП в этой зоне запишем выражение для сигнала рассогласования
 . (7.11)
. (7.11)
Из (7.11) видно, что при увеличении тока I сигнал UВХ уменьшается, что в соответствии с (7.4) и (7.5) вызовет уменьшение сигнала UУи Еn. Это приведет к уменьшению напряжения на двигателе Uи соответствующему снижению тока в якоре двигателя. Характеристики двигателя становятся крутопадающими (мягкими), что и отражает эф-фект регулирования (ограничения) тока и соответственно момента. При увеличении коэффициента усиления системы характеристики в зоне II

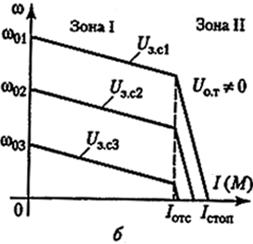
Рис. 7.2. Схема (а) и характеристики (б)замкнутой
системы с ОС по току
все ближе приближаются к вертикальным линиям. Уровень ограничения тока определяется задающим сигналом (уставкой) UЗ.С. Ток при нулевой скорости двигателя получил название тока стопорения IСТОП.
Замкнутая схема ЭП с ДПТ и обратными связями по скорости и току
Эта схема обеспечивает получение характеристик двигателя, име-ющих различную жесткость участков: высокую для точного поддер-жания скорости на заданном уровне и малую, что требуется для ограни-чения тока и момента двигателя в переходных процессах. Это опре-деляется использованием в схеме двух нелинейных обратных связей по скорости и току (рис. 7.3, а). Для создания нелинейности цепей обрат-ных связей использованы рассмотренный ранее узел УТО и узел огра-ничения скорости УСО, характеристики которых показаны внутри соот-ветствующих условных изображений. Нелинейность ОС приводит к разделению области механических характеристик (рис. 7.3,б) на три зоны: I, II и III.
В зоне I в диапазоне токов 0...IОТС действует только ОС по скорости, обеспечивая жесткие характеристики ЭП. В зоне II при I>IОТС вступает в действие ОС по току и характеристики становятся мягче. При дальней-шем увеличении тока и уменьшении скорости ниже скорости отсечки ωОТС перестает действовать ОС по скорости и за счет действия ОС по то-ку характеристики становятся еще мягче (зона III), обеспечивая требу-емое ограничение тока и момента.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 9901; Нарушение авторских прав?; Мы поможем в написании вашей работы!