КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЭП ДТП НВ с трехфазным управляемым преобразователем
|
|
|
|
Процесс рекуперации энергии в сеть
Если к двигателю не подводится механическая энергия с вала, то его скорость и ЭДС снижаются по мере превращения кинетической энергии в электрическую и возвращения последней в сеть. Для того, чтобы ток якоря оставался постоянным на протяжении всего процесса торможения, необходимо постоянно менять угол управления. Такое управление воз-можно в замкнутых системах управления ЭП, в которых вводится ОС по току.
На рис. 6.11 представлены схемы силовых цепей и диаграммы полностью управляемого преобразователя. Моменты включения тиристоров соответствуют углу управления  = 60°, тиристоры включаются через 60°, а частота напряжения якоря в 6 раз больше частоты сети. При большой частоте в полностью управляемых преоб-разователях создаются более благоприятные условия для поддержания непрерывного тока якоря, чем в полууправляемом преобразователе [12].
= 60°, тиристоры включаются через 60°, а частота напряжения якоря в 6 раз больше частоты сети. При большой частоте в полностью управляемых преоб-разователях создаются более благоприятные условия для поддержания непрерывного тока якоря, чем в полууправляемом преобразователе [12].
В момент  включается тиристор VS1. К этому времени тиристор VS6 уже открыт, поэтому на интервале
включается тиристор VS1. К этому времени тиристор VS6 уже открыт, поэтому на интервале  ток проходит через тиристоры VS1 и VS6, подключая к якорю напряжение фаз А и В, равное UЛ= UAB.В момент
ток проходит через тиристоры VS1 и VS6, подключая к якорю напряжение фаз А и В, равное UЛ= UAB.В момент  включается тиристор VS2, закрывая тиристор VS6 обратным напряжением (процесс естественной коммутации). Ток вместо тиристора VS6 проходит теперь через тиристор VS2, поэтому выводы якоря соединены с фазой А через тиристор VS1 и фазой С через тиристор VS2, что соответствует UЯ = UAC. Процесс повторяется через
включается тиристор VS2, закрывая тиристор VS6 обратным напряжением (процесс естественной коммутации). Ток вместо тиристора VS6 проходит теперь через тиристор VS2, поэтому выводы якоря соединены с фазой А через тиристор VS1 и фазой С через тиристор VS2, что соответствует UЯ = UAC. Процесс повторяется через  =60°, когда открывается следующий тиристор. Принятая нумерация тиристоров соответствует очередности их включения.
=60°, когда открывается следующий тиристор. Принятая нумерация тиристоров соответствует очередности их включения.
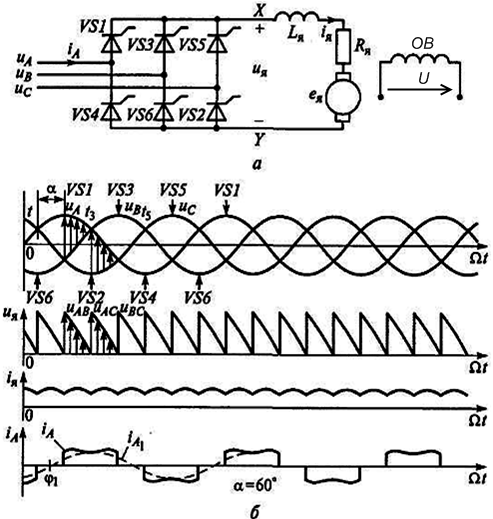
Рис. 6.11. Регулирование скорости ДПТ НВ с помощью преобразователя
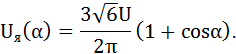
Для полностью управляемого преобразователя среднее напряжение на двигателе:

где UA и UB – фазные напряжения.
Решение уравнений (6.7) и (6.15) позволяет получить уравнение механической характеристики:
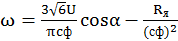 . (6.16)
. (6.16)
Первый член в правой части (6.16) представляет собой скорость идеального холостого хода (М = 0), которая зависит от UЯ. При непре-рывном токе якоря напряжение UЯзависит лишь от угла управления α и определяется уравнением (6.12), эти же кривые представляют зависи-мость скорости ХХ от угла управления. Второй член в правой части (6.16) соответствует изменению скорости с увеличением момента. Чем меньше сопротивление якорной цепи, тем это изменение меньше, т.е. выше жесткость характеристик и больше диапазон регулирования ско-рости. Для полууправляемого преобразователя среднее значение напря-жения равно
Вследствие односторонней проводимости преобразователя ток якоря не может изменить своего направления. Характеристики располагаются только в квадрантах I и IV.
Чтобы ЭП работал во всех четырех квадрантах, необходим второй управляемый выпрямитель (рис. 6.12). Образуется схема реверсивного управляемого выпрямителя, состоящая из двух нереверсивных выпря-мителей 3Ф1Н6П.
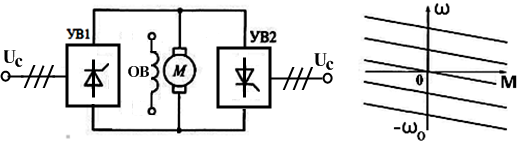
Рис. 6.12. ЭП постоянного тока с реверсивным выпрямителем
В реверсивных управляемых выпрямителях используют различные принципы управления комплектами тиристоров. Например, при раздельном управлении управляющие импульсы подаются только на один из тиристорных комплектов, который должен в данный момент проводить ток. На второй комплект импульсы не подаются, и он не работает – «закрыт».
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 804; Нарушение авторских прав?; Мы поможем в написании вашей работы!