КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Математическое описание двигателя постоянного тока независимого возбуждения
|
|
|
|
Основные уравнения и режимы работы двигателей постоянного тока независимого возбуждения
Основные уравнения для ДПТ НВ.
Ток якоря ДПТ определяется его ЭДС еЯ, сопротивлением якоря RЯ и индуктивностью LЯ.
Электродвижущая сила якоря выражается зависимостью
 , (6.1)
, (6.1)
где с – коэффициент, определенный конструкцией; Ф – магнитный поток двигателя.
Среднее значение ЭДС якоря
 . (6.2)
. (6.2)
Электромагнитный момент
 . (6.3)
. (6.3)
Среднее значение момента
 . (6.4)
. (6.4)
Напряжение якорной цепи двигателя представляется как:
 . (6.5)
. (6.5)
Среднее значение напряжения якоря
 . (6.6)
. (6.6)
Из (5.2) и (5.6) находим выражение для средней угловой скорости двигателя:
 . (6.7)
. (6.7)
Согласно (6.7), скорость ДПТ можно регулировать тремя способами:
1) изменением подводимого напряжения;
2) изменением потока (тока возбуждения);
3) изменением сопротивления цепи якоря.
Рассмотрим регулирование скорости двигателя изменением подводимого напряжения. На рис. 6.8 показаны четыре квадранта меха-нической характеристики двигателя. Квадранты I и III характеризуют двигательный режим работы ДПТ и прямую передачу энергии. Элек-трическая энергия от сети поступает к электрической машине и через ее вал в виде механической энергии передается к приводному механизму. Квадранты II и IV соответствуют генераторному режиму работы ДПТ. В системе осуществляется обратная передача энергии: двигатель полу-чает механическую энергию от приводного механизма и отдает ее в виде электрической энергии в питающую сеть или другому потребителю.
Для вращения двигателя в прямом направлении (квадрант I) Uя, Ея и Iя должны быть положительными; скорость и момент также поло-жительными. При торможении из прямого вращения (квадрант II) дви-гатель вращается в прямом направлении, при этом ЭДС остается положительной. Для обеспечения отрицательного момента и рекуперации энергии ток якоря должен быть отрицательным. В этом случае питающее напряжение Uя должно поддерживаться меньше, чем ЭДС Ея.
При вращении в обратном направлении (квадрант III) Uя, Ея и Iя отрицательны. Чтобы момент также был отрицательным, и энергия пере-давалась бы от источника к двигателю, ЭДС должна удовлетворять условию |Uя| > |Ея|. Полярность Ея должна быть изменена на обратную путем изменения полярности тока возбуждения или переключением зажимов обмотки якоря. При торможении из обратного вращения (квадрант IV) Uя и Ея остаются отрицательными. Для создания положительного момента и передачи энергии от двигателя к источнику ток якоря должен быть положительным. Наведенная ЭДС Ея должна удовлетворять условию |Uя|< | Ея|.
Возможность работы ЭП в одном или нескольких квадрантах определяется выбранным преобразователем. Преобразователи для регу-лирования скорости ДПТ подразделяются на однофазные и трехфазные. Выбор схемы преобразователя зависит:
1) от числа фаз питающей сети;
2) мощности привода;
3) допустимых пульсаций напряжения;
4) необходимости изменения направления вращения и рекуперации энергии в сеть.
Полууправляемый преобразователь обеспечивает работу ЭП на ха-рактеристиках, расположенных в одном квадранте.
Полностью управляемый преобразователь обеспечивает работу в двух квадрантах, поскольку он дает возможность изменять по направ-лению напряжение на якоре двигателя, однако однонаправленная прово-димость тиристоров не позволяет изменить направление тока через якорь двигателя.
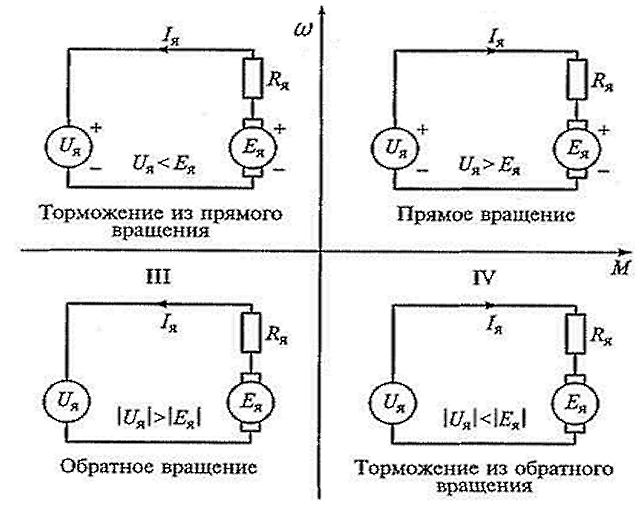
Рис. 6.8. Условия работы ДПТ НВ в различных режимах
Преобразователи с двумя комплектами тиристоров (реверсивные) позволяют регулировать скорость двигателя во всех четырех квадрантах. Двухкомплектные схемы с полууправляемыми мостами обеспечивают работу ЭП в двух квадрантах.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2411; Нарушение авторских прав?; Мы поможем в написании вашей работы!