КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Замкнутый ЭП с параметрическим частотным управлением
|
|
|
|
Замкнутые ЭП с использованием преобразователей частоты
ЭП с импульсным регулированием сопротивления в роторной цепи
Работа этого ЭПхарактеризуется при регулировании скорости двига-теля увеличением в цепи ротора потерь мощности, пропорцио-нальных скольжению, что должно учитываться при выборе двигателя и добавоч-ного резистора.
В общем случае частотное управление двигателем, реализуемое с помощью ПЧ, может быть осуществлено по трем вариантам:
1) параметрическое управление, при котором управляющим воздействием на двигатель являются частота и действующее значение на-пряжения;
2) частотно-токовое управление, при котором управляющим воздей-ствием на двигатель являются частота и действующее значение тока двигателя;
3) векторное управление, связанное с регулированием мгновенных значений питающих напряжений и токов с целью формирования элект-ромагнитного момента двигателя нужной величины.
Сиспользованием этого принципа построены многие частотно-регулируемые асинхронные ЭП. В них за счет использования различных ОС и функциональных блоков формируются жесткие рабочие участки механических характеристик двигателя для качественного регулиро-вания его скорости, ограничиваются ток и момент и обеспечивается требуемое соотношение между регулируемыми частотой и напряже-нием. Обобщенная схема такого ЭП представлена на рис.9.3,а.
Используется ПЧ со звеном постоянного тока, состоящий из неуп-равляемого выпрямителя В и инвертора напряжения, выполненного на шести силовых модулях, состоящих из транзистора и диода. Между выпрямителем и инвертором включен фильтр, состоящий из реактора Lи конденсатора С, обеспечивающий сглаживание выходного напряжения выпрямителя и необходимую циркуляцию реактивной энергии в силовой части схемы.
Инвертор работает в режиме ШИМ и преобразует нерегулируемое напряжение постоянного тока на выходе фильтра в регулируемое по частоте и амплитуде напряжение на статоре двигателя М. Силовая схема ЭП нереверсивная и не предусматривает электрического торможения.

Рис.9.3,а. Схема асинхронного ЭП при частотном управлении
Управление инвертором осуществляется сигналами fyи Uy, опреде-ляющими значения выходных частоты и напряжения ПЧ. Формирование этих сигналов осуществляется СУ, в состав которой входят регулятор скорости PC, регулятор тока РТ, датчики скорости ТГ и тока ДТ, суммирующие усилители (пропорциональные регуляторы)  и
и  , блок ограничения БО сигнала PC, функциональный преобразователь ФП, за-датчик интенсивности ЗИ. Регулятор скорости PC в совокупности с задатчиком интенсивности ЗИ и сумматором обеспечивают требу-емое регулирование скорости и ускорения двигателя в установившемся и переходных режимах работы ЭП с помощью сигнала fy.
, блок ограничения БО сигнала PC, функциональный преобразователь ФП, за-датчик интенсивности ЗИ. Регулятор скорости PC в совокупности с задатчиком интенсивности ЗИ и сумматором обеспечивают требу-емое регулирование скорости и ускорения двигателя в установившемся и переходных режимах работы ЭП с помощью сигнала fy.
Ограничение тока статора и момента двигателя производится регулятором тока РТ. Когда ток статора двигателя меньше тока уставки Iм, сигнал на выходе РТ равен нулю и схема управления обеспечивает ре-жим поддержания заданной скорости. Когда ток статора превысит устав-ку тока Iм, резко увеличивается сигнал на выходе РТ, из-за чего резко снижается и сигнал на выходе сумматора . Это приводит к умень-шению частоты и напряжения на статоре двигателя и тем самым к огра-ничению тока статора и момента двигателя. Функциональный преобразо-ватель ФП, характеристика которого в виде ломаной линии 0 аbс показа-на над его условным изображением на рис. 9.3,а, обеспечивает требу-емое соотношение между частотой и выходным напряжением ПЧ. От-резком 0а создается начальное напряжение на выходе преобразователя, необходимое для преодоления падения напряжения на обмотке статора двигателя при малых частотах напряжения. Участок аb обеспечивает пропорциональное изменение частоты и напряжения (закон частотного управления U  f = const), при котором магнитный поток двигателя под-держивается постоянным. На участке bсвеличина напряжения на статоре остается неизменной, хотя при этом его частота может увеличиваться.
f = const), при котором магнитный поток двигателя под-держивается постоянным. На участке bсвеличина напряжения на статоре остается неизменной, хотя при этом его частота может увеличиваться.
Для уменьшения влияния падения напряжения в цепи статора на величину магнитного потока двигателя и тем самым на его момент предусмотрена положительная ОС по току (IR-компенсация), сигнал которой поступает на вход сумматора  . При увеличении нагрузки двигателя возрастает его ток и увеличивается сигнал Uу, за счет чего возрастает выходное напряжение преобразователя, и тем самым компен-сируется падение напряжения в обмотке статора.
. При увеличении нагрузки двигателя возрастает его ток и увеличивается сигнал Uу, за счет чего возрастает выходное напряжение преобразователя, и тем самым компен-сируется падение напряжения в обмотке статора.
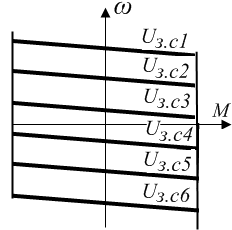
В ЭП этого типа реализация блоков управления схемы рис. 9.3,а, осуществляется МП средствами, а настройка их параметров и характе-ристик производится программным путем. Получаемые в этой схеме ме-ханические характеристики двигателя при различных сигналах задания скорости Uз.с показаны на рис. 9.3,б.
|
| Рис.9.3,б. Характеристики асинхронного ЭП при частотном управлении |
Без ОС по скорости в схеме отсутствуют PCи ТГ, а сигнал с выхода ЗИ непосредственно поступает на вход сумматора ; во всем остальном схема остается без изменения. Сигнал Uз.с задает частоту переключения тиристоров инвер-тора и тем самым частоту тока статора двигателя М. После вычитания из сигнала Uз.с сигнала ОС по скорости Uω получается сигнал Uβ, пропорциональный относитель-ной частоте ротора  .Величину β на-зывают также абсолютным скольжением двигателя.
.Величину β на-зывают также абсолютным скольжением двигателя.
Схема частотно-токового управления АД
Схема ЭП представлена на рис.9.4. Тиристоры VS1-VS6 образуют схему управляемого выпрямителя УВ, а тиристоры VS7 – VS12 – схему автономного инвертора тока АИТ. Между этими блоками включен реак-тор L большой индуктивности с тем, чтобы придать инвертору свойства источника тока.
Конденсаторы С1 – С6 с диодами VD1 – VD6 образуют цепи искус-ственной коммутации тиристоров VS7 – VS12. Остальные элементы схемы имеют следующее назначение: СУВ и СУИ – схемы управления тиристорами выпрямителя и инвертора; РТ, ДТ – соответственно регу-лятор и датчик тока статора; ДС –- датчик скорости; УО – усилитель-ограничитель; ФП – функциональный преобразователь. Схема работает следующим образом.
Она связана со скольжением sдвигателя следующим соотношением:
β = as, где  .
.
Сигнал Uβ, пройдя через УО, вместе с сигналом Uω поступает на вход СУИ. Частота на выходе инвертора определяется сигналом  ; СУИ настроена таким образом, что пока УО работает в линейной зоне, частота на выходе инвертора будет постоянной и независимой от нагрузки. Двигатель при этом имеет жесткие механи-
; СУИ настроена таким образом, что пока УО работает в линейной зоне, частота на выходе инвертора будет постоянной и независимой от нагрузки. Двигатель при этом имеет жесткие механи- 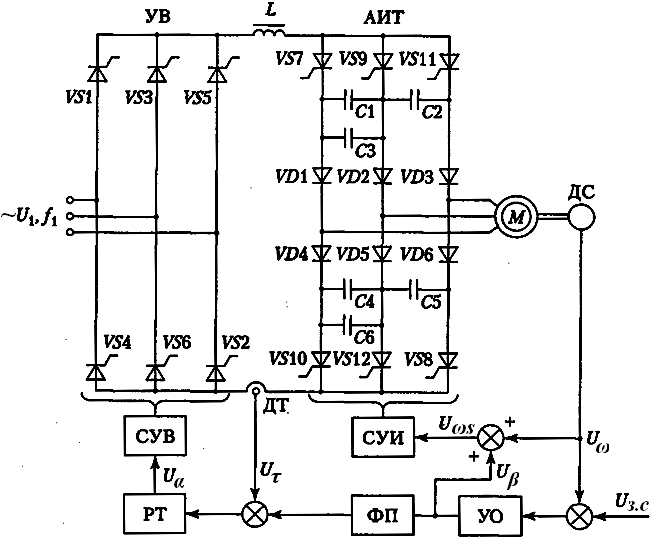 ческие характеристики.
ческие характеристики.
Рис. 9.4. Схема асинхронного ЭП при частотно-токовом управлении
Сигнал Uβ после прохождения через ФП является также сигналом для контура регулирования тока. Так как этот сигнал пропорционален абсолютному скольжению, то и ток двигателя при всех частотах будет ему пропорционален.
При резких изменениях задающего сигнала или при значительных перегрузках двигателя УО входит в зону ограничения (постоянства) сво-его выходного сигнала Uβ, ограничивая тем самым на требуемом уровне и задание для тока. Двигатель при этом работает при любой скорости с постоянными значениями абсолютного скольжения и тока, т.е. механическая характеристика становится абсолютно мягкой, анало-гичная показанным на рис. 9.3,б.
Схема позволяет осуществлять торможение двигателя с рекупе-рацией (отдачей) энергии в сеть, для чего инвертор переводится в режим выпрямления, и выпрямитель – в режим инвертирования тока.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1864; Нарушение авторских прав?; Мы поможем в написании вашей работы!