КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Замкнутые системы частотного электропривода
|
|
|
|
Для регулирования частоты вращения АД в системе частотного привода (ЧЭП) необходимо изменять напряжение и частоту. Асинхронные двигателиАД в номинальном режиме (US,fH0M) работают с номинальным магнитным потоком, который невозможно увеличивать из-за насыщения магнитной цепи. Основная задача, возникающая в замкнутой системе ЧЭП, зак-лючается в стабилизации магнитного потока при изменении нагрузки. Поскольку непосредственное измерение магнитного потока затрудни-тельно, используются обратные связи по току (постоянному и перемен-ному), ЭДС, скорости и абсолютному скольжению.Для повышения жест-кости механических характеристик используется ОС по скорости с воздействием на частоту питания АД.
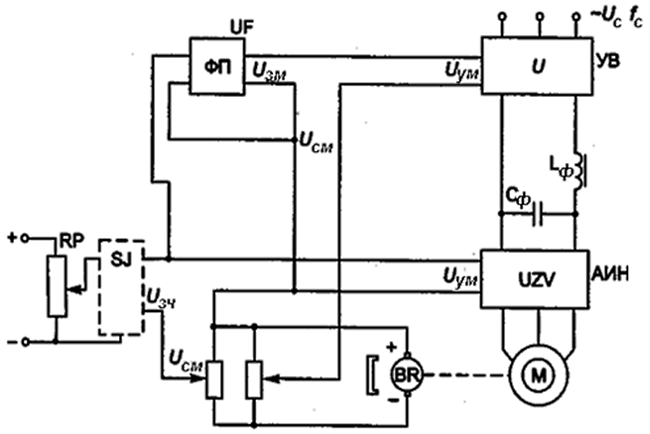
Рис. 8.269 а.Функциональная схема двухконтурной системы
частотногоЭП с АД
Замкнутые системы ЧЭП различаются видом обратных связей и зависят от типа преобразователей частоты (АИН, АИТ). Если в системе применена ОС по скорости, то ее используют и для стабилизации магнитного потока. Такой принцип реализуется в двухконтурной системе ТПЧ (АИН)-АД (рис. 8.262.82,а), где один сигнал управления по частоте UyM используется для задания как частоты, так и напряжения £4.„, через функциональный преобразователь (ФП).). На рис. 2.82,аобозначены сигналы управления частотой Uy.4, напряжением UyM;ОС в каналах управления напряжением £/с.н и частотой Uc.4- В таком ЭП контур регули-рования напряжения выпрямителя, который обеспечивает стабилизацию магнитного потока, и контур регулирования частоты питания, стабили-зирующий скорость двигателя при изменении нагрузки.
 Применение ОС по скорости вместо непосредственного измерения магнитного потока снижает точность его стабилизации, но тем не менее системы вида рис. 8.26, а, позволяют обеспечивать высокую жесткость механических характеристик и доста-точный для многих механизмов ди-апазон регулирования скорости.
Применение ОС по скорости вместо непосредственного измерения магнитного потока снижает точность его стабилизации, но тем не менее системы вида рис. 8.26, а, позволяют обеспечивать высокую жесткость механических характеристик и доста-точный для многих механизмов ди-апазон регулирования скорости.
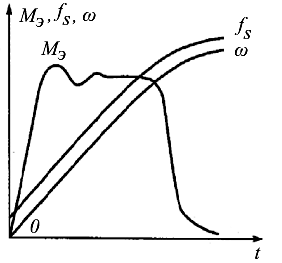
| Р Рис. 8.27. Переходные процессы при пуске АД в системе частного ЭП | |
Для стабилизации момента дви-гателя и соблюдения закона нараста-ния частоты питания в переходных процессах в структуру рис. 8.26,а, вводится отрицательная ОС по току статора или положительная ОС по скорости. Эти обратные связи явля-ются нелинейными (или задержанными) и в установившемся режиме должны быть отключены. Вместо этих ОС, называемых формирующими, применяется задатчик интенсивности SJ (в схеме на рис. 8.26,а обведен штриховой линией), который обеспечивает формирование требуемого закона изменения частоты U3M. Переходные процессы момента МэМЭ, час-тоты статора /fs и скорости при сопри пуске АД в такой системе приведены на рис. 8.28,б27. Система обеспечивает линейное нарастание частоты и пуск двигателя с постоянным ускорением.
Задача замкнутой системы регулирования с автономным инвер-тором тока (рис. 8.2289,а) – — формирование частоты переключения тиристо-ров VS1...VS6 (см. рис. 8.24) и тем самым частоты тока статора fS /s, а также регулирование амплитуды тока статора, для чего воздействие про-изводится на управляемый выпрямитель U.
Система содержит два контура:1) контур регулирования тока, со-держащий регулятор тока (РТ), функциональный преобразователь (ФП), датчик тока (RS) и СИФУ; 2) контур регулирования скорости вращения АД, состоящий из регулятора скорости (PC), датчика скорости (BR), регулятора частоты (РЧ) (генератора импульсов) и распределителя им-пульсов (РИ). Частота тока формируется инвертором АИТ таким обра-зом, что в любой рабочей точке справедливо соотношение:
ω0 = Znω+ω2, (8.26)
где ω2 –— частота тока в роторе.изменяется в зависимости от тока ХХ ω0 = (ОД.....0,5)ωshomдо номинального, т.е. в 2...3 раза. Поэтому ЭП с АИТ строится таким образом, что ток статора не сохраняется постоянным, а увеличивается с ростом нагрузки (частоты тока ротора ω2). Если, например, при регулировании скорости задаться условием постоянства потока двигателя Ф = const, то можно рассчитать зависимость f S = f(фФ), реализующую это условие. Зависимость f S является нелинейной функ-цией (рис. 8.3028,б), которая реализуется с помощью ФП. Величина р — это абсолютное скольжение электродвигателя в рабочей точке, равное отношению угловой частоты ЭДС ротора
Реализация соотношения (8.26) обеспечивается суммированием на входе РЧ двух сигналов, один из которых пропорционален измеренной скорости вращения ротора f/oc, а другой –— заданной частоте тока ротора ω2 £/32 (частоте скольжения ω2 = <»о - ю). Внешний контур регулирования скорости необходим для обеспечения требуемой жесткости механических характеристик. В соответствии с этим требованием выбирается коэффициент усиления PC. Выходной сигнал PC U-ц используется в качестве сигнала задания частоты тока ротора и для формирования сигнала задания тока статора U3i с помощью функционального преобразователя ФП.
, поскольку при изменении нагрузки от нуля до номинальной ток статора двигателя
В ряде случаев замкнутые системы сАИТ оказываются проще, чем с АИН, поскольку в них легче решается задача стабилизации момента, ко-торый пропорционален току, как в системах ЭП постоянного тока. Такие системы называются системами с частотно - токовым управлением.
ПЧ на основе АИТ позволяют создаватьЭП с высоким быстро-действием, работающие в напряженных повторно-кратковременных режимах. К их достоинствам относятся сравнительно небольшое число тиристоров, возможность рекуперации энергии в сеть, для чего УВ переводится в режим ведомого сетью инвертора. Недостатком является необходимость входного реактора большой индуктивности.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1747; Нарушение авторских прав?; Мы поможем в написании вашей работы!