КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Законы частотного управления
|
|
|
|
Частотное управление асинхронными двигателями
Возможность изменения частоты вращения АД при регулировании частоты fi питающего напряжения следует непосредственно из извес-тного в теории электрических машин выражения
,
где ω0 –— синхронная угловая скорость двигателя; р –— число пар полюсов.
При регулировании частоты fi возникает также необходимость в ре-гулировании напряжения источника питания. Объясняется это тем, что ЭДС обмотки статора АД пропорциональна частоте и потоку:
 , (8.10)
, (8.10)
где К0 –— обмоточный коэффициент; ωФ –— число витков фазы обмотки; Ф –— амплитуда потока.
Поток Ф пропорционален отношению E1  f1. Для эффективного ис-пользования двигателя необходимо поддерживать поток в воздушном за-зоре постоянным при всех частотах питания. Это достигается за счет поддержания постоянства E1 f1. Если полное сопротивление статора мало, то E1 примерно пропорционально U1, следовательно, поток в воздушном зазоре будет примерно постоянным при U1 f1 = const. Это отношение сохраняется постоянным, если АД питается от источника с постоянным напряжением и частотой. Порядок чередования фаз трех-фазного источника питания статорной обмотки определяет направление вращения поля, а следовательно, и направление вращения вала двига-теля. Двигатель вращается с угловой скоростью ω, которая обычно на несколько процентов меньше синхронной угловой скорости ω0.
f1. Для эффективного ис-пользования двигателя необходимо поддерживать поток в воздушном за-зоре постоянным при всех частотах питания. Это достигается за счет поддержания постоянства E1 f1. Если полное сопротивление статора мало, то E1 примерно пропорционально U1, следовательно, поток в воздушном зазоре будет примерно постоянным при U1 f1 = const. Это отношение сохраняется постоянным, если АД питается от источника с постоянным напряжением и частотой. Порядок чередования фаз трех-фазного источника питания статорной обмотки определяет направление вращения поля, а следовательно, и направление вращения вала двига-теля. Двигатель вращается с угловой скоростью ω, которая обычно на несколько процентов меньше синхронной угловой скорости ω0.
ЭДС ротора имеет частоту f2 = sf1, где s = f2 l f1 = (ω0–ω1) ω0–— сколь-жение двигателя. Ток ротора I2 отстает от ЭДС на угол φ2, а момент двигателя пропорционален активной составляющей тока ротора I2 cosφ2.
Момент АД также пропорционален магнитному потоку Ф в зазоре, т. е. в общем случае
 . (8.11)
. (8.11)
Если при неизменном напряжении источника питания U изменяется его частота имагнитный поток, то уменьшение частоты f1 приводит к возрастанию потока, насыщению двигателя и увеличению тока намагни-чивания. Последнее вызывает снижение энергетических показателей АД и его недопустимый нагрев, одна из причин которого –— ухудшение обдува АД при работе на низких скоростях.
Увеличение частоты f1 приводит к снижению потока двигателя, следствием которого является недоиспользование стали. Кроме того, снижается максимальный момент двигателя и его перегрузочная способ-ность.
Для надежной работы двигателя необходимо, чтобы его макси-мальный момент двигателя всегда был больше момента нагрузки, т.е. двигатель обладал бы достаточной перегрузочной способностью.
Поэтому при выборе соотношения между частотой и напряжением, подводимым к статору асинхронного двигателя, чаще всего исходят из условия сохранения перегрузочной способности асинхронного двигате-ля, т.е. кратности критического момента к номинальному. Для любой из электромеханических характеристик в этом случае должно выполняться соотношение:
Закон частотного управления из условия сохранения перегрузочной способности, устанавливающий оптимальное соотношение между часто-той, напряжением питания и моментом нагрузки асинхронного двига-теля, сформулирован академиком М.П.Костенко. Этот закон записыва-ется следующим образом:
 , (8.12)
, (8.12)
где UH0M., H0M— – номинальные напряжение и частота сети; U,,f –—напряжение и частота на выходе преобразователя частоты (ПЧ); МНОМ,.М –— номинальное и текущее значения момента АД.
Достоинство частотного управления двигателем в соответствии с соотношением (8.12) при ненасыщенной магнитной системе позволяет сохранять практически неизменным коэффициент мощности и абсолют-ное скольжение, при этом КПД системы не зависит от скорости.
В зависимости от видов нагрузки закон управления напряжением и частотой имеет различные формы. Например, при постоянном моменте нагрузки (МС = const) соотношение (8.12) приобретает вид Uf = const; при постоянной мощности  ; при вентиляторной нагрузке
; при вентиляторной нагрузке
 . Механические характеристики системы ПЧ-АД для трех видов нагрузки, при условии сохраняющегося постоянства перег-рузочной способности двигателя, приведены на рис. 8.17.
. Механические характеристики системы ПЧ-АД для трех видов нагрузки, при условии сохраняющегося постоянства перег-рузочной способности двигателя, приведены на рис. 8.17.
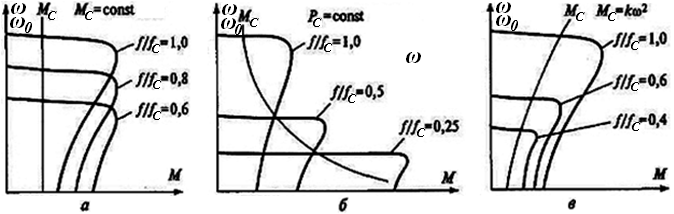
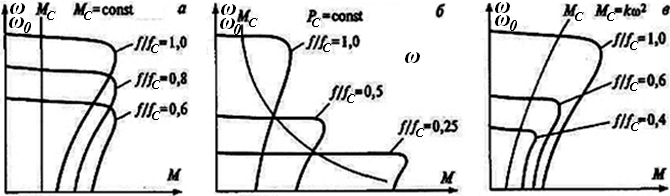
Рис. 8.17. Механические характеристики привода ПЧ-АД: а— – при постоянном моменте; б— – при постоянной мощности;
в— – при вентиляторной нагрузке
Для того чтобы реализовать принцип частотного управления асинхронным двигателемАД, необходимо в соответствии с выражением (8.12) и с учетом вида нагрузки управлять напряжением, подводимым к статору двигателя взаимосвязано с изменением частоты питания.
Если напряжение статора остается постоянным при изменении час-тоты питания, то магнитный поток в зазоре и критический момент уменьшаются с возрастанием этой частоты. Синхронная угловая скорость, соответствующая номинальной частоте, называется базовой ωб. Тогда для других частот она определится зависимостью
 , (8.13)
, (8.13)
где β – коэффициент пропорциональности.
Скольжение можно определить следующим образом:
 , (8.14)
, (8.14)
где ωМАХ –— угловая скорость при максимальном моменте.
Уравнение для момента имеет следующий вид:

где UФ –— фазное напряжение; r1, r'2— – активные сопротивления статора и ротора; х1, х'2— – индуктивные сопротивления статора и ротора.
Уравнение для максимального момента для базовой скорости имеет вид
 . (8.16)
. (8.16)
Максимальный момент для любой другой скорости:
 . (8.17)
. (8.17)
Максимальное скольжение определится зависимостью
 . (8.18)
. (8.18)
Из уравнений (8.16) и (8.17) можно получить
 . (8.19)
. (8.19)
Механические характеристики двигателя рис. 8.17, б. Эти характе-ристики аналогичны характеристикам двигателя постоянного тока независимого возбужденияДПТ НВ при ослаблении потока. Для того чтобы момент на валу двигателя оставался неизменным, необ-ходимо поддерживать постоянным поток в воздушном зазоре двигателя за счет работы при постоянном значении U fисточника питания. Этот вывод получен при пренебрежении сопротивлением обмотки статора, в действительности, при низких частотахпадение напряжения на сопро-тивлениях оказывается сравнимым с индуцированной ЭДС. Это приво-дит к уменьшению потока в воздушном зазоре и момента двигателя. Для того чтобы момент остался постоянным, при частотах менее 20 Гц значение U fнеобходимо увеличивать. Так как ω = βωб, а отношение напряжения к частоте постоянно, то
Ппри номинальном входном напря-жении и базовой угловой скорости
 . (8.201)
. (8.201)
Использовав (8.14) и (8.15)получиммаксимальное скольжение:
 . (8.212)
. (8.212)
Характеристики для этого случая приведены на рис. 8.17,а.
Пример 8.4. Трехфазный АД с обмоткой статора, соединенной в «звезду», имеет: Р2 = 11.2 кВт, п = 1500 мин-1, U = 380 В,f = 50 Гц и параметры: r1 = 0; r2’ = 0,38 Ом; х1 = 1,14 Ом; х'2 = 1,71 Ом;х12 = 33,2 Ом.
Двигатель регулируется изменением частоты питающего напря-жения. При условии, что двигатель работает с максимальным моментом Мmax = 35Н*м, необходимо рассчитать: 1) частоту напряжение питания, В; 2) угловую скорость ωт при максимальном моменте, рад/с; 3) частоту питания, рад/с..
Решение:

Определяем максимальный момент при номинальной частоте, Н/м:

При постоянном значении напряжения статора справедливо выра-жение
Определяем β:
Определяем частоту питания:

или
Скольжение при максимальном моменте определяем по формуле:

Угловая скорость при максимальном моменте
wm = 448(1 - 0,094) = 405,88 рад/с, или 3877,8 мин-1.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 3331; Нарушение авторских прав?; Мы поможем в написании вашей работы!