КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Асинхронный двигатель с тиристорным регулятором напряжения
|
|
|
|
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления αа в функции внешнего сигнала Uy. Изменяя угол управления αа от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля. Форма напряжения статора является несинусоидальной.
Несинусоидальное напряжение представим как совокупность нес-кольких синусоидальных напряжений –— гармоник с определенной час-тотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1,ь а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.На рис.8.14,(б)показаны механические характеристики АД при изменении напряжения на его статоре.
Регулирование напряжения на статоре не приводит к изменению скорости ХХωw0 и не влияет на критическое скольжение sK, но изменяет значение критического (максимального) момента МKк. Критический момент пропорционален квадрату напряжения: МK к~ U2регU2РЕГ.
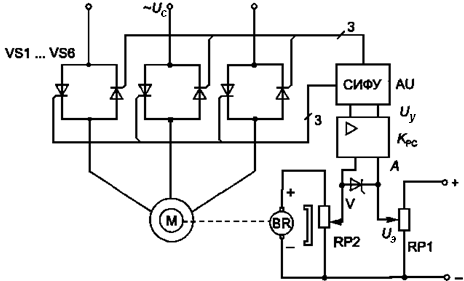
Рис. 8.11.Схема асинхронного ЭП с тиристорным пусковым устройством
Скольжение s определяется зависимостью, где ω0 – скорость идеаль-
ного холостого хода АД:
Скольжение sопределяется зависимостью
где w0 — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и венти-ляцию:
РМЕХ = Мω,
где М – — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ро-тору через воздушный зазор:
РЭМ = Мω0.
Разность мощностей  рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
 . (8.1)
. (8.1)
Часть электромагнитной мощности, пропорциональная скольжению s, рассеивается в виде теплоты в обмотке ротора, другая часть, пропор-циональная (1 - s), передается на вал двигателя, т.е.
 (8.2)
(8.2)
Т. о.,Способ регулирования скорости изменением напряжения является неэкономичным, так как потери в роторе при постоянном моменте наг-рузки возрастают пропорционально скольжению.
Из (8.1) получим выражение длямомент двигателя:
 , (8.3)
, (8.3)
где т –— число фаз статора; r2–— сопротивление ротора.
 .
.
В установившемся режиме работы момент двигателя М равен мо-менту сопротивления МсМС. Для вентиляторной нагрузки

Вывод. Токи АД  обратно пропорциональны
обратно пропорциональны  .
.
Продифференцировав последнее выражение, легко показать, что токи имеют максимальное значение при s = 1/3 или ωw = 2/Зωw0. Для постоянного момента нагрузки полу-чаем:
 .
.
| Рис. 8.12. Характеристика АД с повышенным сопротивлением статора |
Cопротивление ротора является важным параметром, влияющим на токи двигателя. Для получения удов-летворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу необходимо применять двигатели с повышенным сопротивлением ротора, обеспечи-вающим номинальное скольжение 10...12 %. При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше.
На рис. 8.12 приведены харак-теристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 8.11 показывает, что при применении двигателя с повышенным сопротив-лением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с пере-менным сопротивлением ротора. Обычные глубокопазовые или двух-кле-точные двигатели в этих случаях оказываются малоэффективными. Луч-шие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя.
Все перечисленные мероприятия не могут существенноо устранить потери в роторной цепи,что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, (см. рис.7.8,а) могут быть использованы 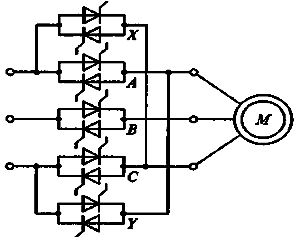 обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
| Рис. 8.13. Схема тиристорного регулятора напряжения для реверсивной схемы |
| Рис. 8.14. Схема несимметричного регулятора напряжения асинхронного двигателя |
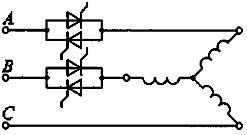 Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Схема регулятора напряжения может содержать только два тирис-тора, включенных в одну из фаз статора двигателя. Однако в несиммет-ричных схемах усугубляются проблемы, связанные с нагревом двига-теля, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Для несиммет-ричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае не равны друг другу

Если магнитная цепь АД не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих заменяется двумя системами симметричных напряжений прямой и обратной после-довательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях. Если принять угловую скорость прямого поля ωwпр = ωwо за положительную, то угловая скорость обратного поля ωwобр = -ωwо В соответствии с этим скольжение относительно поля прямой последовательности вычисляется по формуле

а последовательности:относительно поля обратной последовательности по формуле

Момент, развиваемый двигателем при асимметричной системе нап-ряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей::
 .
.
Поскольку каждая из рассматриваемых систем напряжений симмет-рична, для них справедливы известные формулы расчета момента АД.
Несмотря на все отмеченные недостатки, система ТРН-АД вследст-вие ее простого конструктивного исполнения, нашла широкое примене-ние в связи с тем, что она позволяет обеспечить плавный пуск и тормо-жение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные ре-версивные и нереверсивные контакторы для пуска, реверса и торможе-ния АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в ЭП насосных и вентиляторных установок.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 11539; Нарушение авторских прав?; Мы поможем в написании вашей работы!