КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Векторное управление асинхронным двигателем
|
|
|
|
Векторное управление (ВУ) основано на том, что контролируется не только величина (модуль) управляемой координаты, но и ее пространс-твенное положение (вектор) относительно выбранных осей координат.
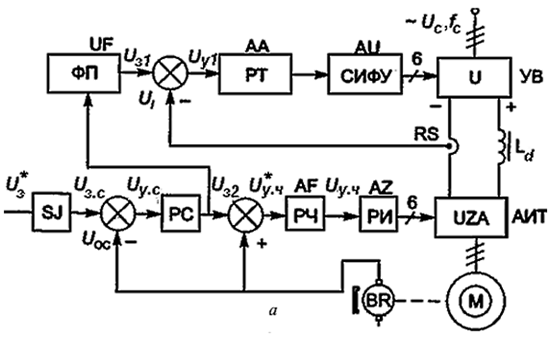
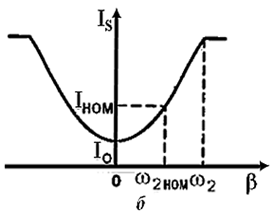
Рис. 8.28.Схема частотного ЭП на основе АИТ (а) и зависимостьтока статора от частоты тока в роторе (б)
Для реализации ВУ осуществляется контроль мгновенных величин напряжения, тока и потокосцепления. Путем математических преоб-разований асинхронный двигательАД, характеризуемый большим количеством нелинейных перекрестных связей, можно представить линейной моделью с двумя каналами управления –— моментом и потоком. Подобное удобство управления требует многократных преобразований координат ЭП, что не является препятствием, учитывая современный уровень развития МП техники.
Для понимания сущности ВУ воспользуемся принципиальной схемой двухфазной двухполюсной обобщенной машины (рис. 8.29), к которой может быть приведена симметричная машина, имеющая m-фазную обмотку статора и я-фазную обмотку ротора.
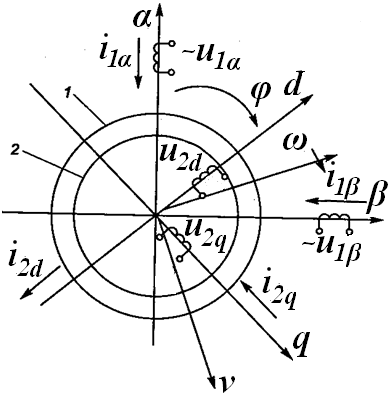
Рис. 8.29. Принципиальная схема двухполюсной двухфазной обобщенной машины: 1 –— статор; 2 –— ротор
Допустим, что система координат вращается в пространстве с произвольными действительнаядействительной,и— мнимой осями, уравнения будут иметь следующий вид:
 , (8.27)
, (8.27)
 , (8.28)
, (8.28)

где uS, Щ,iS, i2,ψS, ψ2 \j7-s>V2 —– соответственно векторы напряжений, токов и потокосцеплений статора 1 и ротора 2; j –— обозначение мнимой оси; Zn— – число пар полюсов; Lm–—взаимная индуктивность между обмотками статора и ротора; /2 — комплексно-сопряженный вектор i-i; 1т— мнимая часть комплексной переменной;ωюк –— угловая скорость ротора. Потокосцепления равны
 , (8.29)
, (8.29)
где Ls(Lsa+Lm) и L2(L2<, +Lm) – индуктивности фазных обмоток соответст-венно статора и ротора.
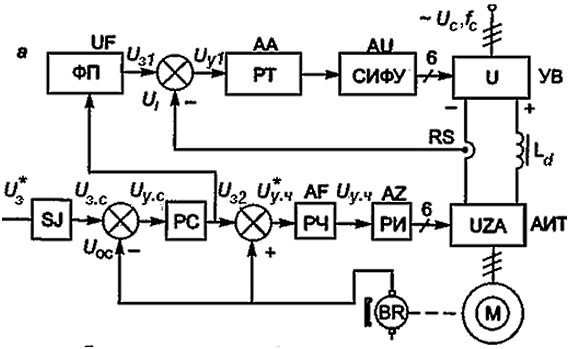
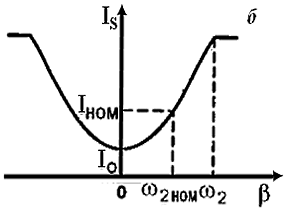
Рис. 8.30.Схема частотного ЭП на основе АИТ (а) и зависимостьтока статора от частоты тока в роторе (б)
Уравнения (8.27) можно записать, используя проекции обобщенных векторов на оси координат и, v, т.е. в скалярной форме:


 . (8.30)
. (8.30)
В зависимости от используемых переменных состояния АД уравне-ния момента могут иметь различную форму. Кроме приведенного урав-нения (8.28), применяют следующие выражения электромагнитного момента:
 , (8.31)
, (8.31)


Уравнения обобщенной машины для системы координат uv(8.27) могут быть записаны в любой системе координат. Выбор координатных осей зависит от типа машины (синхронная, асинхронная) и целей иссле-дования. Применение нашли следующие системы координат: непод-вижная система координат ар (©к = 0); синхронная система координат АУ (сок = соо) и система координатdq,вращающаяся вместе с ротором (сок = со). Взаимное расположение век-торов переменного АД приведено на рис. 8.30.
Переход от уравнений обобщенной машины (8.27), (8.28) к урав-нениям реального трехфазного АД осуществляется с помощью урав-нений координатных преобразованийе.9М — угол момента, q> — угол между векторами тока и напряжения). О,, = вм + ф — угол вектора напряжения (XY); 6«= 9„ + 8V — угол вектора тока. Формулы координатных преобра-зований получены при условии постоянства мощности обеих машин. Они могут быть получены для любых переменных, записанных в любых осях.
Преобразования реальной машины к обобщенной называются пря-мыми, а преобразования обобщенной машины к реальной – —обратными. Например, формулы прямого преобразования фазных напря-жений ста-тора usa, Щь, uscк уравнениям ит, и$ в осях ар векторной диаграммы имеют вид:
 . (8.32)
. (8.32)
Для рассмотрения векторного управления выбирается система координат XY, вращающаяся в пространстве со скоростью поля, т.е. о)к = соо, за последнюю принимается скорость вектора потокосцепления ротора. \j/2- Скорости вращения векторов напряжения, тока и потокосцепления одинаковы лишь в установившихся режимах, а в переходных процессах они различны. Принцип векторного управления заключается в том, что
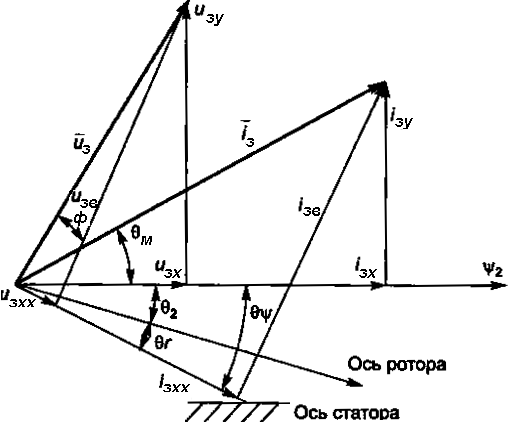
Рис. 8.30. Взаимное расположение векторов переменного АДВекторная диаграмма: % = 82 + вг— угол потока.
Формулы обратного преобразования
Usb =(~Usa+А/ЗU45)/ 2, Usc =(-Мю -л/ЗUф)/ 2. (8.33)
вектор переменной (тока, напряжения и т.д.) располагают в пространст-ве определенным образом. Наиболее эффективно расположить вектор потокосцепления vj72вдоль вещественной оси Xсинхронной системы коор-динат, вращающейся со скоростью поля тогда  . При этом уравнения АД с короткозамкнутым ротором имеют вид
. При этом уравнения АД с короткозамкнутым ротором имеют вид



0= -ω2 + R2 K 2 isy,
Mэ= 3/2 ZII K2 ψ2 isy. (8.34)
где К2 = Ls— Кг Lm; Кг = Ьт/Ьг, сог = соо — со — частота скольжения или частота тока ротора.Анализируя уравнения (8.34), можно заметить их некоторое сходствос уравнениями ДПТ: момент в (8.34) пропорционален потоко-сцеплению ротора и составляющей вектора тока статора isy, а потоко-сцепление пропорционально составляющей isx/и. Это дает возможность, подобно ДПТ, раздельно управлять потоком и моментом, т.е. принцип ВУ приближает АД с его синусоидальными переменными к ДПТ. ВУ позволяет использовать при синтезе методы подчиненного регули-рования, широко распространенные в ЭПх постоянного тока. Различие (не в пользу ВУ) состоит в том, что независимое управление потоком, моментом и скоростью осуществляется не реальными переменными двигателя, а преобразованными к иной системе координат.
2. При частоте вращения 810 мин-1:
Функциональная схема векторного управления АД рис. 8.31: з –— задание; У –— управление; ОС –— обратная связь по скорости; с –— скорость; / I –— ток; х, у – —принадлежность переменных к синхронной системе координат; αа, β р–— принадлежность переменных к неподвижной системе координат; ф – потокосцепление; а, Ьb,с – индексы фаз.
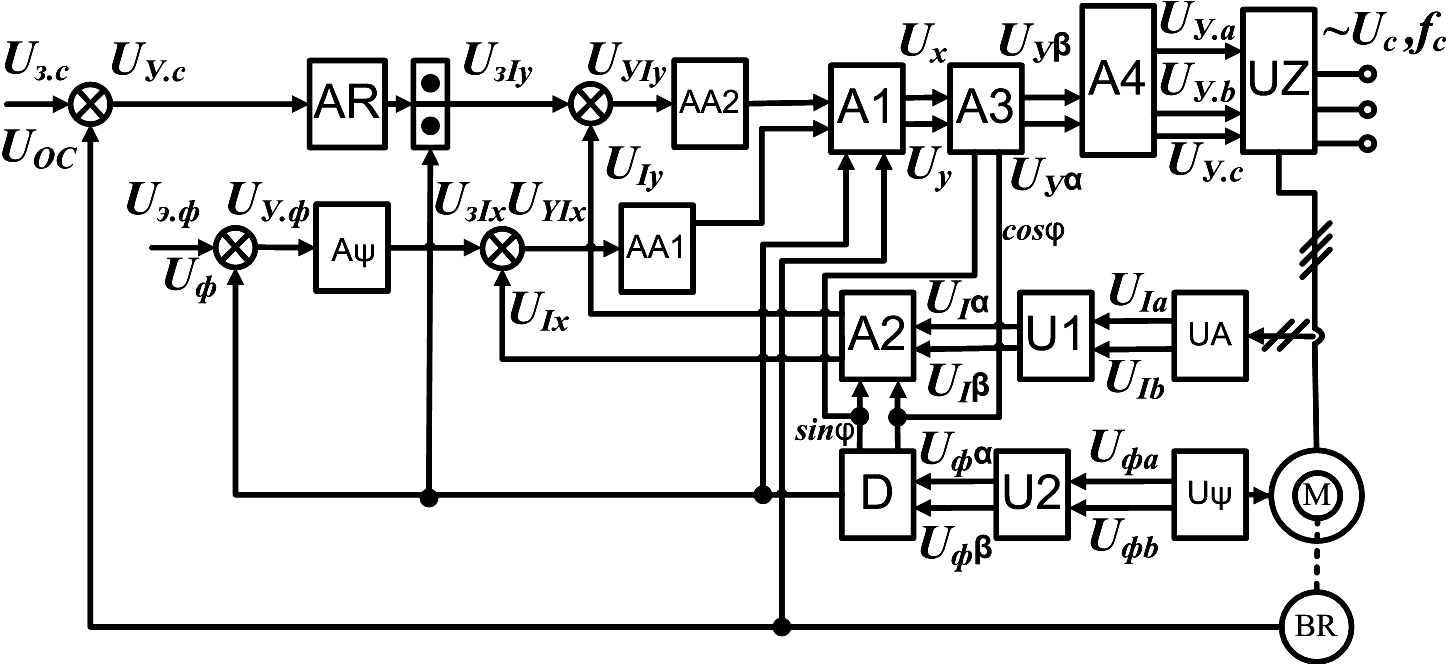
Рис. 8.31.Функциональная схема векторного управления АД
Схема выполнена на основе принципа подчиненного регулирования и содержит три контура:
1) скорости (внешний); содержит датчик скорости BR и регулятор скорости вращения (момента) AR;
2) потокосцепления (магнитного потока) с регулятором потока Av|/Uψ и каналом ОС, имеющим выходную величину щ;
3) активной^и реактивной 4е составляющей вектора тока статора с регу-ляторами АА2 и АА1.
Сигнал ОС по току статора осуществляется датчиком тока UA, который измеряет фазные токи двигателя в двух фазах, например А и В, и вырабатывает сигналы uiaи ы,*. Для преобразования этих сигналов к неподвижной системе координат служит функциональный преобразователь U1, работающий в соответствии с формулами (8.32) прямых координатных преобразований cosф = Uфо/Uф, которые в преобразователе А2 позволяют перейти от непод-вижных координат ар αβк координатам XYпо noследующим формулам:
uia=uia,;
uiβ=1/√3 (uiα+uib).
Измерение потокосцепления может производиться с помощью различных устройств, например измерительной обмоткой укладываемой в теже пазы, что и силовая обмотка. Наибольшее распространение полу-чили датчики Холла, помещаемые в воздушный зазор двигателя. Сигна-лы датчика Uy преобразуются в функциональном преобразователе U2 по формулам (8.32) в сигналы ифаи Ыфр неподвижной системы координат. Полу-ченные величины необходимо преобразовать к системе координат XY вращающейся в пространстве со скоростью поля двигателя.
С этой целью в пореоброазователе D выделяется модуль потокосцеп-ления ротора
в виде соответствующего сигнала иф

 . (8.35)
. (8.35)
Сигналы напряжения ифа, «фр, Uix, uiyпропорциональны соответствующим физичес-ким величинам.
На вход регулятора потокосцепления UψАу подается разность сиг-налов задания потокосцепления мзфи ОС мф, т.е. «у.Ф = "з.ф - мФ, а на выходе Ау формируется сигнал задания тока статора по оси X, т.е. u3ix. Разность сигналов u3ix - Uix, проходя через регулятор тока АА1, превращается в сигнал и*ы.Аналогичные преобразования имеют место в канале управления по оси Y, заза исключением того, что здесь установлен регулятор скорости (момента) AR, выходной сигнал которого делится на сигнал модуля потокосцепления Uψмф для получения сигнала задания тока и по оси Y. На выходе регулятора АА2 составляющей тока статора по оси Г вырабатывается сигнал и!у, который вместе с сигналом и,* подается на входы Бблока А1, функционируетющего в соответствии с первыми двумя уравнениями (8.34). На выходе блока А1 получаем пре-образованные сигналыихи щ, в которых отсутствует взаимное влияние кон-туров регулирования составляющих токов по осям XylY. Управляющие сигналы их и иу, записанные во вращающейся системе координат XY, в координатном преобразователе A3 превращаются в сигналы управления ПЧ в неподвижной системе координат аВ αβпо уравнениям
Uix= uiαcosφ + uiβsinφ,;
Uyα= uxcosφ - uysinφ,
Uyβ= uxcosφ - uysinφ. (8.36)
Для управления силовыми ключами ПЧ в трехфазной системе координат необходимо с помощью АЧ получить сигналы иуаUУа, UУbиуь, UУcмусв соответствии с формулами обратного преобразования (8.33):
uyα=uyα,

 . (8.37)
. (8.37)
Благодаря координатным преобразованиям в системе векторного управления ЧЭП выделяют два канала регулирования: потокосцепления (магнитного потока) и скорости вращения (момента). В этом смысле система векторного управления аналогична ЭП постоянного тока с двухзонным регулированием скорости.
Для многократного преобразования координат ЭП в соответствии с приведенными выше формулами служат специализированные микро контроллеры класса DSP, работающие в режиме реального времени. Это позволяет получить глубокорегулируемые ЭП с высоким быстродейст-вием, используя асинхронный короткозамкнутый двигатель.
Существует множество структурных решений векторного управле-ния. Функциональная схема ВУ АД рис. 8.31 относится к классу прямого ВУ, при котором непосредственно измеряется по-токосцепление (магнит-ный поток). При косвенном ВУ измеряют положение ротора АД и электрические параметры (ток, напряжение). Такие системы получили большое распространение по двум причинам:
1) измерение потока трудоемко;
2) датчик положения необходим во многих промышленных ЭП (например,позиционный ЭП станков с ЧПУ и автоматических манипуляторов).
Если нет необходимости измерять положение ротора, применяют так называемое «бездатчиковое» ВУ (датчик положения ротора отсутст-вует),что требует более сложных вычислительных процедур.
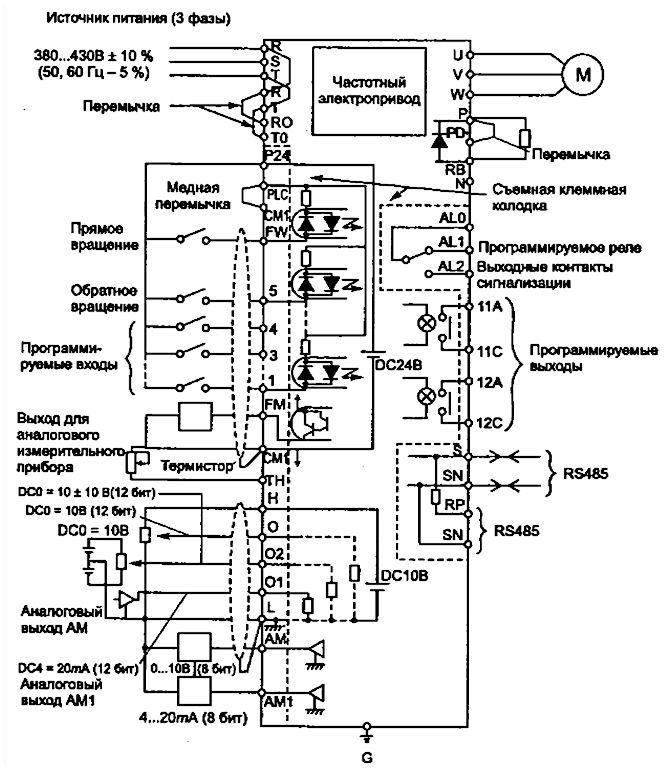
Рис. 8.32.Схема подключения комплектного ЭП.
ЭП с ВУ обеспечивает широкий диапазон регулирования скорости (до 10 000) и во многих случаях заменяет широкорегулируемый ЭП с коллекторными ДПТ.
Схема комплектного ЭП рис. 8.32 изготавливаемого многими предприятями содержит: клеммы силовые: R, S, T (LI, L2, L3) –— клеммы питания; U, V, W (Tl, T2, ТЗ) –— выход преобразователя частоты; PD, Р –— подключение дросселя в промежуточном звене постоянного тока; Р, RB–— внешний тормозной резистор; Р, N –— внешний модуль торможения; G–— защитное заземление.
Клеммы управления: L –— клемма «общий» для аналоговых входов и выходов; Н –— питание потенциометра задания частоты; О –— клемма установки выходной частоты напряжением; 01, 02 –— дополнительная клемма установки выходной частоты соответственно током и напряже-нием; AM –— импульсный выход (напряжение); AMI –— аналоговый выход (ток); Р24 –— клемма питания; СМ1, ПС, 12С, AL0 –— клемма «общий»; PLC –— общая клемма для внешнего источника питания; FW–— прямое вращение; 1, 2, 3, 4, 5 –— программируемые дискретные входы; ПА –— клемма программируемого выхода 11; 12А –— клемма программируемого выхода 12; AL1, AL2 –— реле сигнализации; ТН –— вход термистора.
Клеммы управления: L — клемма «общий» для аналоговых входов и выходов; Н — питание потенциометра задания частоты; О — клемма установки выходной частоты напряжением; 01, 02 — дополнительная клемма установки выходной частоты соответственно током и напряжением; AM — импульсный выход (напряжение); AMI — аналоговый выход (ток); Р24 — клемма питания; СМ1, ПС, 12С, AL0 — клемма «общий»; PLC — общая клемма для внешнего источника питания; FW — прямое вращение; 1, 2, 3, 4, 5 — программируемые дискретные входы; ПА — клемма программируемого выхода 11; 12А — клемма программируемого выхода 12; AL1, AL2 — реле сигнализации; ТН — вход термистора.
Контрольные вопросы
.
1. Покажите вращающееся магнитное поле при симметричном питании при числе фаз, отличном от трех, например при т = 2, т = 6.
2. Каковы негативные последствия регулирования скорости напряжением в цепи статора при длительном режиме работы?
3. Для каких механизмов предпочтительно регулирование скорости изменением напряжения?
4. По какой причине частотное регулирование скорости АД является наиболее экономичным?
5. Должно ли регулироваться напряжение при регулировании частоты и почему?
6. Какие ограничения имеются при регулировании частоты АД сверх- номинального значения?
7. Какие типы преобразователей частоты для питания АД вы знаете? Приведите формы напряжения на двигателе.
8. Какие способы коммутации тиристоров вы знаете?
9. Какими способами осуществляется регулирование напряжения статических преобразователей?
10. В чем существенное различие инверторов тока и напряжения?
11. Возможно ли рекуперативное торможение в системе частотного ЭП? Что для этого нужно в системе АИН-АД и системе НПЧ-АД?
12. Возможно ли получение частоты питания АД выше частоты сети в системе НПЧ-АД?
13. Какие комплектные частотные ЭП вы знаете?
14. Каково назначение конденсатора в звене постоянного тока в преобразователе частоты на основе автономного инвертора напряжения при работе на АД?
15. Сравните значение коэффициента мощности для частотного ЭП с АД при питании от автономного инвертора напряжения и для АД при питании от сети (при одинаковых значениях частоты и нагрузки).
16. Какие системы координат применяются при векторном управ-лении?
17. Для чего при векторном управлении необходимо преобразование переменных из одной системы координат в другую?
18. Возможно ли векторное управление без датчиков магнитного потока АД?
19. Нарисуйте схему системы тиристорный регулятор напряжения – —асинхронный электродвигатель (система ТРН— – АД).
20. Как будут изменяться механические характеристики АД при изменении угла управления ТРН?
21. В каких пределах может изменяться момент сопротивления на валу электродвигателя в системе ТРН— – АД? Нарисуйте примерную об-ласть его допустимых значений на графиках механических характерис-тик.
22. Нарисуйте схему включения дополнительного резистора в роторную цепь АД при импульсном регулировании.
23. Каким образом изменяются потери энергии в АД с импульсным регулированием добавочного резистора при регулировании скорости АД?
24. Нарисуйте примерный вид механических характеристик АД с импульсным регулированием добавочного резистора при разных значе-ниях скважности коммутации тиристоров.
25. Объясните принцип действия асинхронного вентильного каскада (АВК).
26. Покажите на графике, как будут изменяться механические харак-теристики АВК при изменении угла опережения инвертора.
27. Каким образом должно изменяться напряжение на статоре АД при изменении частоты в случае разных законов изменения момента сопротивления от скорости?
28. Покажите примерный вид механических характеристик при частотном регулировании скорости в случае, если момент сопро-тивления не зависит от скорости.
29. Назовите, какие типы ТПЧ применяются при частотном регули-ровании скорости АД. В случае какого ТПЧ возможно регулирование скорости только в области ее малых значений.
30. В чем заключается смысл «векторного управления» АД?
33.Трехфазный 4-полюсный АД, обмотка статора которого соединена в «звезду», имеет следующие номинальные данные: Р2=11,2 кВт, п= 1500 мин-1, U=380 В,f=50 Гц. Заданы параметры двигателя:r=0,66 Ом,; r2’ = 0,38 Ом, х= 1,14 Ом, х'2=1,71 Ом, хm = 33,2 Ом. Двигатель регулируется одновременным изменением напряжения и частоты. Отношение напряжения к частоте поддерживается постоянным и равным отношениюих номинальных значений.
34.Рассчитайте максимальный момент Мmaxи соответствующую ему; скорость wmах для частот 50 и 30 Гц.
35.Повторите п. 1, пренебрегая сопротивлением статора (r = 0).
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 4803; Нарушение авторских прав?; Мы поможем в написании вашей работы!