КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Следящие электроприводы
|
|
|
|
С
ледящим называется ЭП, который обеспечивает (воспроизводит) с заданной точностью движение исполнительного органа рабочей машины в соответствии с произвольно изменяющимся входным сигналом управления. Этот сигнал может изменяться в широких пределах по произвольному временному закону и иметь механическую или электрическую природу. Чаще всего входной сигнал представляет собой скорость или угол поворота оси или вала задающего устройства. Следящий ЭП применяется для антенн радиотелескопов и систем спутниковой связи, в металлообрабатывающих станках, для привода роботов и манипуляторов, в автоматических измерительных устройствах и во многих других случаях.
Следящий ЭП (рис.13.1) состоит из датчика входного сигнала 1 и датчика 5 выходной координаты, измерителя рассогласования 2, системы управления 3 и электродвигателя с механической передачей 4, которая приводит в движение исполнительный орган 6 рабочей машины.
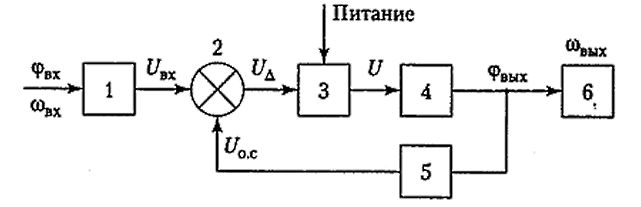
Рис.13.1. Схема следящего ЭП
Датчики входной и выходной величин преобразуют механические величины (скорость или угол поворота вала) в электрические – входной сигнал UВХ и сигнал ОСUо.с. Измеритель рассогласования 2, алгебраи-чески суммируя эти сигналы, вырабатывает сигнал рассогласования U∆, поступающий в систему управления 3.Следящий ЭП по своей структуре представляет собой замкнутую систему, действующую по принципу отклонения.
Система управления 3 состоит из регулятора (усилителя) и силового преобразователя, которые обеспечивают необходимое преобразование сигнала рассогласования U∆в напряжение U, поступающее на двигатель. За счет выбора схем регулятора и преобразователя или введения коррек-тирующих устройств обеспечивается необходимый закон изменения это-го напряжения во времени U(t) при отработке входного воздействия ω(t) или φВХ(t).
Электродвигатель и механическая передача 4 в соответствии с зако-ном изменения U(f) обеспечивают перемещение исполнительного органа 6. Иногда двигатель с механической передачей называют исполнитель-ным механизмом (сервомеханизмом).
Классификация следящего ЭП может быть выполнена по несколь-ким признакам. Если следящий ЭП предназначен для воспроизведения с заданной точностью скорости движения исполнительного органа, он на-зывается скоростным, а если положения – то позиционным.
Различают следящие ЭП с непрерывным и прерывным управлением; последние, в свою очередь, делятся на релейные и импульсные.
В следящих ЭП непрерывного действия напряжение, пропорцио-нальное сигналу рассогласования, постоянно подается на двигатель.
Следящий ЭП релейного действия характеризуется тем, что напряжение на двигатель подается только в том случае, когда сигнал рассогласования достигает определенного значения. Поэтому работа ре-лейного следящего ЭП характеризуется определенной зоной нечувст-вительности по отношению к входному сигналу.
Импульсный следящий ЭП отличается тем, что управляющее воздействие на двигатель подается в виде импульсов напряжения, амплитуда, частота или заполнение которых изменяется в зависимости от сигнала рассогласования. В этих случаях говорят соответственно об амплитудно-, частотно- и широтно-импульсной модуляции сигнала уп-равления.
В следящем ЭП используются двигатели переменного и постоянно-го тока, различные виды усилителей, датчики скорости и положения и другие аналоговые и цифровые устройства управления.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1493; Нарушение авторских прав?; Мы поможем в написании вашей работы!