КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Особенности конструкций шаговых двигателей
|
|
|
|
Математическое описание шагового двигателя
где KT – число тактов двигателя; mY – число обмоток управления; n1=1 –при симметричной системе коммутации; n1=2 – при несимметричной системе коммутации;n2=1 – при однополярной коммутации; n2=2 – при двуполярной коммутации; αш – величина углового шага; ZP – число зубцов ротора; fK – суммарный угол поворота.
В шаговых двигателях с постоянными магнитами (ШД-ПМ) в качестве роторовиспользуются постоянные магниты. Особенность ШД-ПМ состоит в том, что ротор в конце такта движения приходит в фиксированное положение даже при снятии питания с обмотки статора. Такое положение ротора называют положением фиксации.
Из рассмотренного принципа действия ШД следует, что чем меньше шаг, тем точнее можно отработать угол. Как видно из формулы (14.1), уменьшение шага требует увеличения числа полюсов, что при неизмен-ном диаметре ротора ограничено технологическими возможностями и увеличением потока рассеяния между полюсами. Поэтому обычно принимают Zn = 4...6, что ограничивает шаг несколькими десятками градусов.
Реактивные двигатели (ШД-Р) являются основным типом ШД, при-меняемых в настоящее время. Для пояснения конструкции ШД-Р рас-смотрим поперечное сечение трехфазного двигателя (рис.14.3,а), статор которого имеет шесть зубцов. Каждые два зубца статора, распо-ложенных на 180° друг от друга, принадлежат одной фазе. Катушки фаз могут подсоединяться параллельно или последовательно; на рис.14.3, бони соединены последовательно. Ротор имеет четыре зубца. Статор и ротор обычно изготавливаются из шихтованного магнито-мягкого мате-риала, обладающего высокой магнитной проницаемостью. При соеди-нении обмоток, которое показано на схеме, зубцы I, II, IIIприналичии питания образуют северный магнитный полюс, а зубцы I', II', III' – южный.
При подключении катушки фазы (рис.14.3,а) образуется магнитный поток и ротор устанавливается в такое положение, что зубцы статора Iи I' и еще какие-либо два зубца ротора располагаются по одной линии. В этой позиции магнитное сопротивление минимально, что обеспечивает устойчивое положение равновесия.
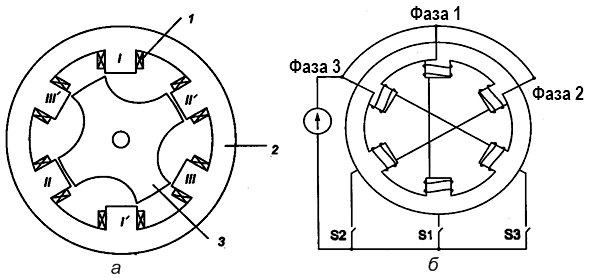
Рис. 14.3. Поперечное сечение трехфазного реактивного ШД (а) и схема соединения обмоток (б): 1 – обмотка; 2 – статор; 3 – ротор
Процесс поворота ротора при отключении фазы 1 и включении фазы 2 показан на рис. 14.4 (а – возбуждена фаза 1; б – фаза 1 отключена, фаза 2 подключена (начало такта); в – положение ротора в конце шага, фаза 2 возбуждена). В дальнейшем фаза 2 отключается, а фаза 3 включается и т.д. Каждая коммутация приводит к повороту ротора на 30° в положительном направлении. После трех коммутаций ротор повернется на 90°. Число фаз т, зубцов ротора NT, а также количество шагов Sза один полный оборот ротора связаны соотношением
S=mNr. (14.3)
Для уменьшения шага увеличивают число зубцов. На рис. 14.5,а показано поперечное сечение трехфазного ШД-Р с числом зубцов статора NS = 12 и ротора Nr = 8, что вдвое больше, чем у конструкции, приведенной на рис. 2.92. Это дает S = 3 х х 8 = 24 и угол шага α = 2л/24 = 15°. Четырехфазный ШД-Р, имеющий NS = 8 и NT = 6, показан на рис.14.5,б. Для четырехфазного ШД-Р, имеющегоNS = 16 и Nr = 12, угол шага  .
.
 Для уменьшения шага двигателя требуется увеличение числа зубцов ротора и статора, хотя последнее не входит непосредственно в формулу (14.3). Из рассмотренных рисунков следует, что увеличение Ns и Nr встречает технологические трудности. Стремление уменьшить угол шага привело к конструкции реактивного редукторного ШД (РШД) (рис.14.6), где обмотка располагается вокруг больших выступающих частей, называемых полюсами. Полюс статора имеет два или более зубцов, которые намагничиваются в одном направлении.
Для уменьшения шага двигателя требуется увеличение числа зубцов ротора и статора, хотя последнее не входит непосредственно в формулу (14.3). Из рассмотренных рисунков следует, что увеличение Ns и Nr встречает технологические трудности. Стремление уменьшить угол шага привело к конструкции реактивного редукторного ШД (РШД) (рис.14.6), где обмотка располагается вокруг больших выступающих частей, называемых полюсами. Полюс статора имеет два или более зубцов, которые намагничиваются в одном направлении.
Рис. 14.4. Процесс поворота ротора на один шаг при отключении фазы 1 и включении фазы 2
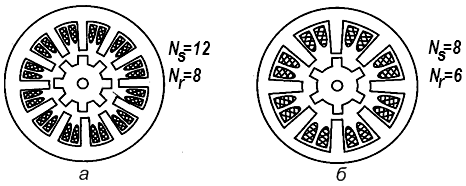
Рис. 14.5. Трехфазный ШД-Р при числе зубцов статора Ns = 12,
ротора N, = 8 (а) и Ns = 8, Nr= 6 (б)
Каждая обмотка управления (фаза) располагается на диаметрально противоположных полюсах статора (1 – 1', 2 – 2', 3 – 3', 4 – 4'). Ротор РШД имеет также зубцовую структуру. Зубцовые деления статора и рото-ра равны. Шаг и число зубцов на роторе и полюсах статора выбираются так, чтобы между зубцами ротора и зубцамиполюса, который в данный момент не возбужден, имел место сдвиг на 1/4 и зубцового шага, т.е. на 1/4 для рис. 14.6. Тогда для двух оставшихся полюсов сдвиг будет составлять соответственно 2/4 и 3/4 зубцового шага тГ (тГ – часть окружности, занимаемая зубцом и пазом).
При возбужденной обмотке I на первом такте коммутации зубцы статора и ротора располагаются на одной оси (рис.14.7,а). Момент Мравен нулю, ротор неподвижен. При возбуждении обмотки 2 (рис.14.7,б) вектор магнитного потока Ф поворачивается на 45°, магнитные силовые линии деформируются и появляется момент М,под действием которого ротор поворачивается на угол, равный 1/4 зубцового деления. В конце этого процесса ротор займет положение, при котором зубцы располагаются на одной линии (рис.14.7,в). Затем возбуждается фаза 3 и т.д.
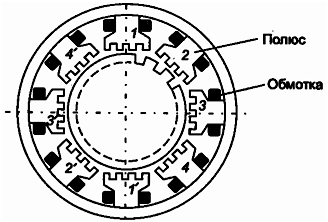
Рис.14.6. Конструкция реактивного редукторного ШД
Процесс поворота ротора при переключении тока с обмотки 1 на обмотку 2 показан на рис. 14.7.
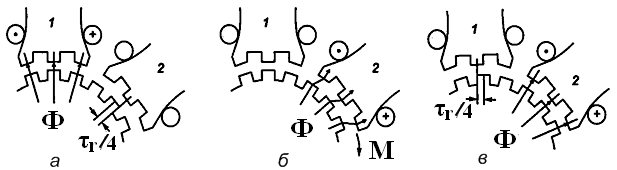
Рис. 14.7. Пояснение принципа действия реактивного редукторного ШД:
а – фаза 1 включена;б – фаза 1 отключена, фаза 2 включена (начало такта);в – фаза 2 включена (конец такта)
Шаг угла поворота ротора вычисляется по формуле α = 2n/(mNr). За полный цикл коммутации ротор поворачивается на одно зубцовое деление 2it/NT,а отношение электрического шага к механическому составит α = N:/Zn.
Некоторые примеры конструктивных параметров РШД: т = 3, NT = 14; т = 3, Nr = 44; т = 4, iVr = 50.
Рассмотренные ШД имеют однопакетную конструкцию. Даль-нейшее уменьшение шага поворота ротора возможно в многопакетной (каскадной) конструкции ШД, в которых секции статоров развернуты относительно друг друга на часть зубцового деления. Чередование коммутации по фазам и секциям дает возможность уменьшить дискрет-ность в г раз (г – число самостоятельных секций – пакетов).
Индукторные ШД (ШД-И) отличаются от реактивных тем, что в них применяется подмагничивание ротора (электромагнитное или постоян-ными магнитами). Постоянный поток подмагничивания возбуждается со стороны статора или ротора. Такие двигатели называют также гибридными, поскольку в них используются принципы как реактивного двигателя, так и двигателя с постоянными магнитами. По сравнению с ШД-Р индукторные ШД при одинаковом шаге обеспечивают большее значение синхронизирующего момента, в результате чего улучшаются энергетические и динамические характеристики. Существуют также гибридные двигатели с постоянными магнитами на статоре, принцип работы которых не отличается от рассмотренных.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1902; Нарушение авторских прав?; Мы поможем в написании вашей работы!