КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Цифроаналоговый позиционный следящий ЭП постоянного тока
|
|
|
|
При необходимости получения высокой точности слежения (до 0,001%) в следящих ЭП применяются цифровые устройства управления (задатчики, сумматоры, счетчики и т.д.) и датчики координат. Сочетание цифровой измерительной частис аналоговой, выполненной по принципу подчиненного регулирования координат, образует цифроаналоговую схему управления ЭП.
Аналоговая часть ЭП (рис.13.4) выполнена по структуре подчинен-ного регулирования координат, в которой внешний контур регулирова-ния положения выполнен цифровым, а внутренние контуры регулирова-ния тока и скорости – аналоговыми. Аналоговая часть содержит регуля-тор тока РТ, на который поступают сигналы задания по току Uз.т и ОС по току Uо.т, подаваемые соответственно с регулятора скорости PC и датчика тока ДТ. Выходной сигнал регулятора тока Uyявляется управляю-щим для реверсивного преобразователя ПУ, питающего якорь ДПТНВ – М. Регулятор скорости PC, получает сигналы Uо.с. от датчика скорости (тахогенератора) BRи Uз.с от задатчика интенсивности ЗИ, входным сигналом которого является выходной сигнал Uз.с регулятора положения РП.
Цифровая измерительная часть ЭП, формирующая сигнал рассогла-сования U∆, содержит датчики входной ДП1 и выходной ДП2 координат ЭП (его положения), арифметическое суммирующее устройство АСУ, преобразователь кода в напряжение ПКН (преобразователь «код – аналог») и преобразователь кода положения вала ДПТ вдвоичный код ПК.
Работа цифровой части следящего ЭП. Требуемое перемещение исполнительного агрегата рабочей машины вырабатывается задатчиком ДП1 в виде числа Nз.п в двоичном коде. Этот сигнал подается на вход сумматора АСУ вместе с числовым сигналом Nn (в двоичном коде), соответствующим действительному положению исполнительного органа рабочей машины.
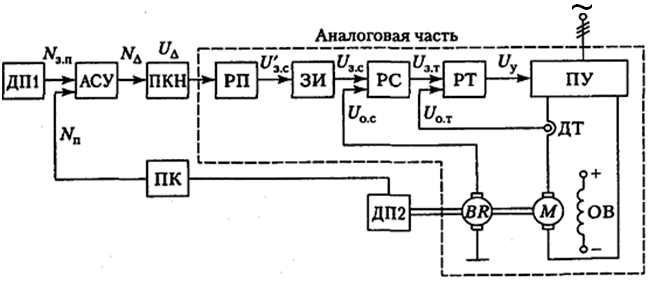
Рис.13.4. Схема цифроаналогового следящего ЭП
Сумматор АСУ обеспечивает суммирование этих двух цифровых сигналов и выделение сигнала рассогласования (ошибки) в цифровом коде N∆. Далее цифровой сигнал N∆ с помощью преобразователя ПКН преобразуется в аналоговый сигнал U∆(напряжение постоянного тока), который поступает на вход регулятора положения РП.
Цифроаналоговый следящий ЭП имеет хорошие динамические показатели работы за счет аналоговой части и высокую точность слежения, обеспечиваемую цифровой частью. Элементы и устройства такого ЭП могут быть реализованы на основе унифицированной серии аналоговых (УБСР-АИ) и цифровых (УБСР-ДИ) регуляторов.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1010; Нарушение авторских прав?; Мы поможем в написании вашей работы!