КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип работы и способы коммутации шаговых двигателей
|
|
|
|
ДИСКРЕТНЫЕ ЭЛЕКТРОПРИВОДЫ С ШАГОВЫМИ ДВИГАТЕЛЯМИ
О
т синхронных двигателей ШД отличаются многообразием конст-руктивных решений и способов управления. Они широко применяются в качестве исполнительных элементов рабочих ор-ганов механизмов, которые должны совершать строго дозированные перемещения. Для иллюстрации этого приведем несколько примеров: Новый импульс применению ШД придало широкое распространение ЭВМ и информационных технологий, где ШД используются для управ-ления головкой дисковода, графопостроителем и т.д.
По принципу действия ШД делятся на три типа:
1) двигатели с ротором, представляющим собой постоянный магнит (магнитоэлектрические);
2) синхронные реактивные двигатели с переменным магнитным сопротивлением (индукторные);
3) гибридные (или синхронные реактивные) двигатели, которые обладают свойствами двигателей первых двух типов.
По числу фаз – обмоток управления – ШД разделяются на однофаз-ные, двухфазные и многофазные; по числу пакетов стали магнито-провода – на однопакетные, двухпакетные и многопакетные; по способу фиксации ротора при обесточенных обмотках управления – на двигатели с внутренней и внешней фиксацией.
Роторы ШД не имеют пусковой короткозамкнутой обмотки; их пуск производится не асинхронным, а частотным способом.
Упрощенная схема восьмифазного ШД приведена на рис.14.1. Пола-гаем, что ротор имеет два полюса. Питание обмоток может быть однопо-лярным, когда напряжение изменяется от нуля до +Un, и двухполярным (от +Un до –Un).
Каждому импульсу унитарного кода на входе системы управления соответствует операция переключения фаз ШД, смещающая на опреде-ленный угол или расстояние (в линейных ШД) вектор магнитного поля в зазоре машины. Это приводит к одновременному смещению в пространс-тве положения устойчивого равновесия подвижного элемента (ротора), что вызывает перемещение последнего на один шаг.
Электронные коммутаторы могут обеспечивать питание обмоток статора либо порознь, либо группами в различных сочетаниях. Каждому такту коммутации включенных обмоток, число которых зависит от способов включения, соответствуют определенные величина и направ-ление вектора F результирующей намагничивающей силы (НС), а следо-вательно, и вполне определенное положение ротора в пространстве. Например, если обмотки ШД в схеме, приведенной на рис.14.1,а, подключать к источнику питания поочередно (1–2–3–...–8–1–...), то ротор двигателя будет иметь число устойчивых положений, равное числу фаз, т.е. восемь (т=8), которые совпадают с осями обмоток.
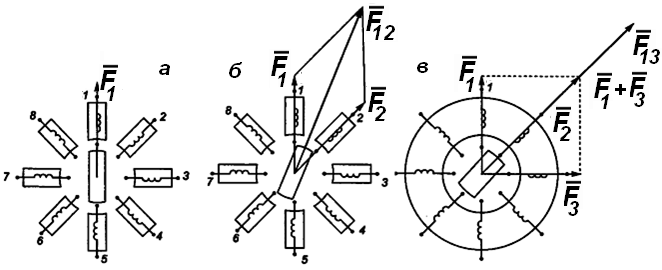
Рис.14.1. Схемы питания обмоток восьмифазного ШД и положения ротора. Механический шаг

|
| Рис.14.2. Векторные диаграммы для пятифазного ШД |
Последовательный перебор комбинаций включенных фаз может со-ответствовать симметричной коммутации, при которой в каждом такте число фаз одинаково (четное или нечетное). Рассмотренный выше вариант является симметричной ком-мутацией. Другой вид симметричной коммутации – последовательный перебор из двух одновременно включенных фаз (12) – (23) – (34) –... (см.рис. 2.90,б), при котором суммарный вектор 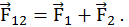 Принесимметричной комму-тации число включенных фаз изменяется от такта к такту. Например, чередование «одна фаза» – «две фазы», т.е. (1) – (12) – (2) – (23), является несиммет-ричной коммутацией. Другой вид несиммет-ричной коммутации – чередование «две фазы» – «три фазы», т.е. (12) – (123) – (23) – (234) –... (рис.14.1, в).
Принесимметричной комму-тации число включенных фаз изменяется от такта к такту. Например, чередование «одна фаза» – «две фазы», т.е. (1) – (12) – (2) – (23), является несиммет-ричной коммутацией. Другой вид несиммет-ричной коммутации – чередование «две фазы» – «три фазы», т.е. (12) – (123) – (23) – (234) –... (рис.14.1, в).
На практике с целью увеличения результирующей НС двигателя, а следовательно, магнитного потока и синхронизирующего момента, обыч-но одновременно подключают две, три и большее число обмоток.
При этом ротор ШД при холостом ходе занимает положения, в которых ось ротора совпадает с результирующим вектором НС. При подключении четного числа обмоток положение результирующего век-тора Fl2 совпадает с линией, проходящей между двумя соседними обмотками (рис14.1,б). Если же включено нечетное число обмоток, ус-тойчивое положение ротора совпадает с осью средней обмотки (рис. 14.1,в). Таким образом, в обоих случаях симметричной коммутации (при четном и нечетном числе подключенных обмоток) ротор двигателя будет иметь т устойчивых положений. При несимметричной коммутации число устойчивых положений ротора двигателя равно 2т. Указанные соотношения справедливы для двигателей, имеющих число пар полюсов Zn = 1. На практике широко используются многополюсные двигатели. Если Zn>1, то m-фазный ШД может иметь либо mZn устойчивых положений (при симметричной коммутации), либо 2mZn положений (при несимметричной коммутации). Виды коммутаций фаз ШД характеризу-ются числом тактов коммутации п, равным числу комбинаций включен-ных фаз при их последовательном переборе до повторения исходной комбинации, т.е. за цикл коммутации. Величина шага (в электрических радианах) определяется так:
α=2π/n,
привключении: а – фазы 1; б – фаз 1 и 2; в – фаз 1,2,3
αм=2π/(Znn). (14.1)
Скорость вращения ротора ШД находится по соотношению
ω=2πfy/(Znn)= αмfy, (14.2)
где fV – частота импульсов, подаваемых на обмотки ШД, Гц.
Получение различных устойчивых состояний поясняется векторной диаграммой, которая показывает неравномерность распределения маг-нитного поля. В самом деле, амплитуда суммарного вектора НС для т = 8 равна: при одной включенной фазе (суммарный вектор неизменен и равен вектору НС одной фазы):

где индекс «1» означает количество включенных фаз;при двух фазах

при трех фазах

Таким образом, при т = 8 и коммутации (1) – (12) – (123) –... или (1) –(12) – (2)... имеет место существенная неравномерность амплитуды вектора НС, что создает дополнительные трудности при работе двига-теля. С этой точки зрения интересный результат можно получить для двигателей с числом фаз т = 5 и коммутации (12) – (123) – (23) –... В самом деле,

Векторные диаграммы для этих случаев приведены на рис.14.2. Так как при т = 6 и т = 8 имеет место неравномерность амплитуды НС, то ШД мощностью более 100 Вт выполняются в основном пятифазными.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 1532; Нарушение авторских прав?; Мы поможем в написании вашей работы!