КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Загальна структура робота
|
|
|
|
 |
Рисунок 2.1 – Структурна схема робота
У загальному виді робот складається з чотирьох систем:
1. Виконавча система (маніпулятор) призначена для цілеспрямованого впливу на навколишнє середовище (об'єкт маніпулювання). Складається із захоплюючого пристрою і виконавчого механізму.
2. Інформаційна система за допомогою датчиків забезпечує збір і первинну обробку даних про хід технологічного процесу, стан зовнішнього середовища, про функціонування вузлів і механізмів промислових роботів.
3. Система зв'язку призначена для передачі інформації в інформаційну систему.
4. Керуюча система призначена для формування закону управління маніпуляторною системою на підставі даних, що надходять від інформаційної системи, а також для взаємодії з людиною і системами управління більш високого рівня ієрархії.
2.3 Класифікація промислових роботів
За методом управління промислові роботи (ПР) можна розділити на біотехнічні та автоматичні. У біотехнічних маніпуляторах у процесі управління безупинно бере участь оператор, який задає з пульта рух маніпулятора (командне керування) або керуючий дистанційно з пристрою, кінематично подібного до руки робота (копіююче управління). Можливе також напівавтоматичне керування: завдання команд на виконання серії змін положення маніпулятора. В автоматичних системах процес керування іде без участі людини-оператора. Роль людини зводиться до попереднього налагодження і пуску системи.
У залежності від складності систем керування виділяють три покоління роботів:
- жорстко програмовані, програма дій яких не змінюється в процесі роботи, а може бути змінена тільки в процесі налаштування оператором;
- адаптивні, які мають систему, здатну коректувати програму в процесі роботи на підставі інформації про об'єкт і середовище;
- гнучко програмовані або інтелектуальні. Мають елементи штучного інтелекту, тобто на підставі інформації про об'єкт і середовище, одержуваної від добре розвиненої інформаційної системи, сприймати (розпізнавати) обстановку і на підставі цієї інформації та інформації про мету управління здатні формувати програму своїх подальших дій.
За характером операцій, які виконуються, ПР розділяють на: виробничі роботи – які виконують основні операції (зварювання, фарбування, збирання і т.п.); підйомно-транспортні (допоміжні) роботи, що виконують дії типу взяти-перенести – покласти; універсальні роботи – що виконують різнорідні технологічні і допоміжні операції.
За ступенем спеціалізації роботи ділять на: спеціальні, що виконують визначені операції; цільові, що виконують технологічні операції одного типу; багатоцільові, що виконують різні основні і допоміжні операції.
За вантажопідйомністю роботи ділять на: надлегкі (до 1 кг вантажопідйомності); легкі (до 10 кг); середні (до 200 кг); важкі (до 1000 кг); надважкі (понад 1000 кг).
За типом приводів ПР ділять на: електромеханічні; пневматичні; гідравлічні; комбіновані.
За типом виконання ПР ділять на: нормального виконання; пилозахищеного виконання; теплозахищеного виконання; вибухобезпечного виконання.
2.4 Основні технічні показники промислових роботів
Тип ПР характеризується числом маніпуляторів, вантажопідйомністю, числом ступенів рухливості, класом точності і типом виконання, типом робочої зони і т.п.
Вантажопідйомність розраховують як сумарну вантажопідйомність його рук. Для деяких типів ПР важливим є зусилля, що розвивається виконавчим механізмом (зусилля затиску об'єкта, крутний момент і т.п.).
Число ступенів рухливості ПР – сума можливих координатних рухів об'єкта маніпулювання щодо опорної системи. Від числа ступенів свободи залежать:
- маневреність маніпулятора – можливість обходу рукою перешкод і здатність маніпулятора до виконання складних дій;
- мобільність маніпулятора;
- коефіцієнт сервісу маніпулятора – можливість підходу захоплюючого пристрою до заданої точки з різних напрямків.
Точність позиціонування – відхилення заданої позиції виконавчого механізму від фактичної при багаторазовому позиціонуванні.
Робоча зона ПР – простір, у якому може знаходитися робочий орган маніпулятора при роботі.
Система координатних переміщень визначає кінематику основних рухів і форму робочої зони.
При роботі декількох ПР як характеристика робототехнічного комплексу (РТК) наводиться зона спільного обслуговування.
2.5 Використання роботів і РТК у харчовій промисловості
Основне завдання ПР у харчовій промисловості – зв'язок між транспортно-вантажними потоками і технологічними операціями.
ПР і РТК використовуються для розвантаження, завантаження контейнерів, доставки тари, перевантаження виробів з конвеєрних систем на інших транспортних засобів, укладання виробів на піддони, тару, завантажувальні позиції технологічного устаткування.
Приклади використання:
1. Відбір проб.
2. Укладання хліба в лотки.
3. Укладання цукерок у коробки.
4. Складання коробок в ящики з гофрокартону.
5. Складання ящиків на піддони (рис. 3.2).
6. Декоративне оформлення тістечок (рис. 3.3).
7. Укладання пивних і молочних пляшок у ящики.
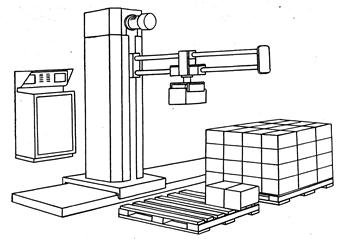
Рисунок 2.2 – Робот «Акма-392» з механічним захоплюючим пристроєм для укладання ящиків на піддони.
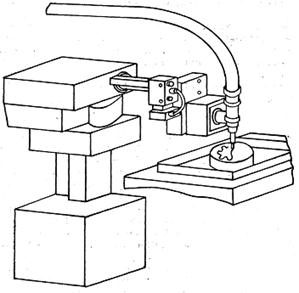
Рисунок 2.3 – Робот для декоративного оформлення тістечок і тортів фірми «Фанук» (Японія).
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 465; Нарушение авторских прав?; Мы поможем в написании вашей работы!