КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура системы
|
|
|
|
Классификация промышленных объектов управления
Общие принципы
Промышленные объекты управления
Современные системы управления сложными объектами промышленной технологии строятся по иерархическому принципу. Это значит, что система управления такими объектами расчленяется на ряд систем, стоящие на разных уровнях подчинения. Система более высокого ранга, ориентируясь на общий (глобальный) критерий управления, выдает команды на включение или отключение отдельных локальных объектов, а также осуществляет выбор частных критериев управления этими объектами. Локальные системы управления осуществляют поддержание заданных оптимальных режимов как в пусковых, так и в нормальных эксплуатационных условиях. Являясь нижним иерархическим уровнем автоматических систем управления промышленными объектами, локальные системы осуществляют функции измерения, контроля и регулирования основных параметров, характеризующих состояние технологического процесса. Количество регулируемых параметров в отдельно взятой локальной системе управления невелико и составляет один или два параметра. Из общего числа систем управления современным производством локальные системы составляют около 80%. Качество работы локальных систем управления во многом определяет стабильность и качество выходного продукта, а следовательно, и рентабельность производства.
По характеру протекания технологических процессов объекты управления делятся на циклические, непрерывно-циклические и непрерывные. Локальные системы наиболее широко применяются для управления объектами второго и третьего типов.
По характеру установившегося значения выходной величины объекта при действии на его вход ступенчатого сигнала выделяют объекты с самовыравниванием и без самовыравнивания.
По количеству входных и выходных величин и их взаимосвязи объекты делятся на одномерные (один вход и один выход) и многомерные. Последние могут быть многосвязными - когда наблюдается взаимное влияние каналов регулирования друг на друга, либо несвязные - взаимосвязь между каналами которых мала.
Статические характеристики объекта управления устанавливают связь между установившимися значениями входа и выхода объекта. По виду статических характеристик объекты делятся на линейные и нелинейные. В последних статическая характеристика может быть гладкой, линеаризуемой в окрестности заданной точки, либо носить существенно нелинейный характер. При наличии в объекте нескольких нелинейностей, графическим методом определяется его суммарная нелинейная характеристика. Большинство систем регулирования относиться к классу систем автоматической стабилизации режима работы объекта относительно его рабочей точки (номинального режима). В этом случае в процессе работы отклонения переменных, относительно рабочей точки будут малы, что позволяет использовать линейные модели объекта управления. Однако, при смене рабочей точки происходит изменение коэффициента усиления объекта, что будет негативно влиять на динамику замкнутой системы.
Для системы автоматической стабилизации не обязательно определение полной статической характеристики объекта. Достаточно знать лишь динамический коэффициент усиления в окрестности рабочей точки. В тоже время на некоторых объектах управления необходимо знание всей статической характеристики процесса. Если она носит нелинейный характер, то с целью стабилизации общего коэффициента усиления системы, в замкнутый контур включают дополнительную нелинейность, обратную статической характеристике объекта. На практике такой подход реализуется путем использования регулирующих клапанов с различными видами расходной характеристики.
Реальные объекты занимают в пространстве какой-либо объем, поэтому регулируемая величина зависит не только от времени, но и от текущих координат точки измерения. Поэтому полное описание объекта управления будет состоять из системы дифференциальных уравнений с частными производными. При использовании точечного метода измерения одним датчиком, система дифференциальных уравнений с частными производными переходит в систему уравнений с обычными производными. Это существенно упрощает построение математической модели объекта, позволяя определить его передаточную функцию. Однако при наличии множества датчиков, распределенных например, по длине объекта, может возникнуть необходимость использования множества управляющих сигналов (распределенное управление).
Объекты могут быть как стационарные, так и нестационарные. В нестационарных объектах параметры изменяются с течением времени (дрейфуют). Примерами таких объектов могут быть химический реактор с катализатором, активность которого падает с течением времени, или аэрокосмический аппарат, масса которого по мере выгорания топлива уменьшается. Такие явления должны учитываться при проектировании соответствующих систем управления.
В зависимости от интенсивности случайных возмущений действующих на объект, они делятся на стохастические и детерминированные. В реальных условиях часто точно неизвестны ни точка приложения возмущения F, ни его характер (Рис.).
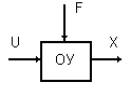
Рис. 9 Внешние возмущения в объектах управления
Известно, что лишь при наличии достаточно точной математической модели объекта можно спроектировать высококачественную систему управления этим объектом. Причем, согласно принципу Эшби, сложность управляющего устройства должна быть не ниже сложности объекта управления.
Поэтому основной целью построения математической модели объекта управления является определение структуры объекта, его статических и динамических характеристик. Особенно важно определение структуры для многомерных и многосвязных объектов управления. В тоже время для локальных объектов управления определение структуры может быть сведено к определению порядка дифференциального уравнения описывающего объект. Кроме того, оцениваются входные сигналы и возмущения, действующие на объект (их статистические характеристики, точки приложения, максимальные амплитуды). Значение этих характеристик позволяет выбрать структуру регулятора и рассчитать параметры его настройки, ориентируясь также на критерий качества работы этой системы.
В типичную систему управления входят объект, регулятор, привод и датчики. Основная интрига управления связана с тем, что на объект действует окружающая среда внешние возмущения, которые «мешают» регулятору выполнять поставленную задачу. Большинство возмущений заранее непредсказуемы, то есть носят случайный характер.
Кроме того, датчики измеряют параметры не точно, а с некоторой ошибкой, пусть и малой. В этом случае говорят о «шумах измерений» по аналогии с шумами в радиотехнике, которые искажают сигналы. Подводя итоги, можно нарисовать структурную схему системы (рис. 10)
Рис. 10 Структурная схема СУ
Информация в системе управления как бы «ходит по кругу»: регулятор выдает сигнал управления на привод, который воздействует непосредственно на объект; затем информация обобъекта через датчики возвращается обратно к регулятору и все начинается заново. Говорят,что в системе есть обратная связь, то есть регулятор использует информацию о состоянии объекта для выработки управления. Системы с обратной связью называют замкнутыми, поскольку информация передается по замкнутому контуру.
Большинство промышленных объектов управления имеют запаздывания. Наличие запаздывания объясняется конечной скоростью распространения потоков информации в технологических объектах (транспортное запаздывание). Наряду с этим при понижении порядка модели объекта вводят дополнительное динамическое запаздывание. Для этого выделяют одну наибольшую постоянную времени, а все остальные малые постоянные времени заменяют звеном динамического запаздывания.
|
|
|
|
|
Дата добавления: 2014-12-23; Просмотров: 513; Нарушение авторских прав?; Мы поможем в написании вашей работы!