КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Приборы и системы для измерения температуры и контроля состояния масляных систем двигателя
|
|
|
|
Для получения максимальной энерговооружённости и экономичности полёта силовые установки ЛА работают с предельной тепловой напряжённостью. Вследствие этого на борту ЛА необходимо измерять и контролировать температуру различных сред и конструкций с высокой точностью. Так, на ЛА измеряют температуру газов в газотурбинных двигателях, масла в системах смазки, тепловоздушной смеси, окружающего воздуха, головок цилиндров поршневых двигателей и т.д.
Приборы для измерения температуры, применяемые в авиации, имеют чувствительные элементы (ЧЭ), которые непосредственно приводятся в соприкосновение со средами или конструкциями, температура которых измеряется. Передача тепла ЧЭ происходит либо путём теплопроводности при измерении температуры твёрдых тел, либо конвекции при измерении температуры жидких или газообразных сред. В качестве авиационных термометров наибольшее распространение нашли терморезисторные и термоэлектрические термометры дистанционного типа.
Терморезисторные термометры основаны на свойстве металлических и полупроводниковых терморезисторов изменять своё сопротивление в зависимости от температуры.
Для металлических терморезисторов зависимость сопротивления R от измеряемой температуры t в определённом интервале значений является линейной функцией
R = Ro [ 1 + α (t - to)],
где, Ro – сопротивление терморезистора при температуре to;
α – температурный коэффициент сопротивления.
В качестве материалов, которые используются для изготовления металлических терморезисторов, применяются химически чистые металлы, так как они обладают большими значениями α, стабильностью их в широком диапазоне температур, хорошей воспроизводимостью свойств и стойкостью к внешним воздействиям.
Для полупроводниковых терморезисторов (термисторов) функция сопротивления R от температуры описывается нелинейной зависимостью
R = A e В/Т,
где, А,В – постоянные, характеризующие свойства материала термистора, Т – температура.
Для изготовления термисторов применяются в основном медномарганцевые и кобальтомарганцевые соединения. В авиационных терморезисторных термометрах в качестве термо – ЧЭ наибольшее распространение получила никелевая проволока, выдерживающая нагрев до 3000 С. Её недостатком является зависимость температурного коэффициента αNi от примесей в металле. Чтобы исключить этот недостаток и обеспечить взаимозаменяемость датчиков, последовательно обмотке из никелевой проволоки подключают дополнительные сопротивления R М из материала с возможно малым температурным коэффициентом αМ, обычно из константана или манганина.
Термометр типа ТЭУ. Унифицированный электрический термометр сопротивления предназначен для измерения температуры масла, воды и воздуха от – 70 до 1500 С. Комплект термометра состоит из датчика, указателя и линии связи. Электрическая схема прибора приведена на рисунке.
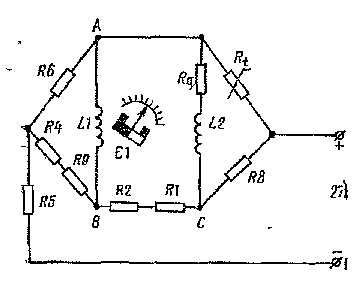
Рис.2 Унифицированный электрический термометр
Терморизистор Rt никелевой проволоки включён в одно из плеч двойного моста. В качестве указателя применён логометр с неподвижными рамками L1 и L2 и подвижным магнитом Е1. Одни концы рамок логометра соединены в общую точку А, другие – в мостовую схему через сопротивление температурной компенсации R1 и R2 к точкам В и С. Параметры схемы рассчитаны так, что при температуре, равной половине диапазона измерений, потенциал точки А равен половине суммы потенциалов точек В и С. В этом случае токи в рамках L1 и L2 равны, но противоположны по направлению. Подвижный магнит под действием магнитных полей рамок отклонится на угол, при котором стрелка, закреплённая на оси магнита, установится по шкале указателя в среднее положение. При изменении температуры среды сопротивление терморезистора Rt и потенциал точки А изменятся. Нарушится равенство токов в рамках. Стрелка логометра покажет по шкале указателя новое значение температуры. Схема двойного моста, применяемая в ТЭУ, имеет значительно сниженные температурные погрешности и повышенную чувствительность по сравнению со схемой, применяемой в ЭДМУ.
Конструктивно датчик состоит из теплочувствительного элемента, корпуса 1 и штепсельного разъёма 5. Теплочувствительный элемент представляет собой тонкую (d = 0,05 мм) никелевую проволоку 8, намотанную на слюдяную пластину 9. Для изоляции никелевую обмотку закрывают с обеих сторон так же слюдяными пластинами.
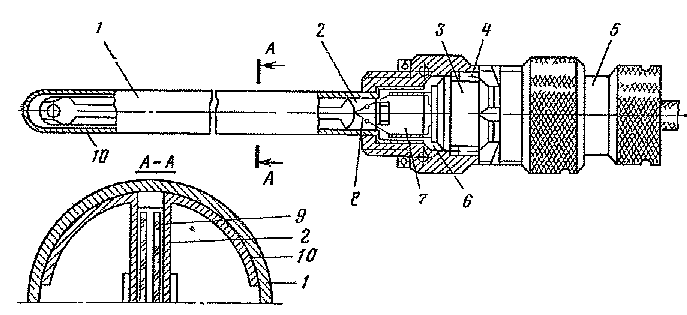
Рис.3 Конструкция датчика температуры
Улучшению теплообмена между никелевой проволокой и окружающей средой служат теплопроводящие прокладки 10 из серебра. Материалом для изготовления корпуса 1 служит нержавеющая сталь. В качестве указателя применяется логометр, имеющий такое же устройство, как и в ЭДМУ.
При изменении температуры с помощью терморезисторных термометров возникают методические погрешности:
- за счёт передачи части тепла от терморезистора к месту его крепления и конструкциям, имеющим меньшую температуру, чем температура измеряемой среды;
- от торможения датчиков потока движущейся среды, при котором происходит переход в тепло кинетической энергии движущейся среды, при котором происходит переход в тепло кинетической энергии движущейся среды;
- от нагрева терморезистора протекающим по нему током.
Первую методическую погрешность уменьшают путём увеличения площади части датчика, погруженной в среду, и улучшения теплоизоляции непогруженной части. Вторая погрешность устраняется с помощью изменения конструкции датчиков. Для скорости набегающего потока до 100 м/с применяются конструкции, подобные рассмотренной. Торможение потока среды датчиком при таких скоростях не вызывает значительной погрешности. Для измерения температуры среды, движущейся с большими скоростями, корпус датчика конструируют так, что ЧЭ располагается вдоль набегающего потока.
Корпус 2 датчика типа ТНВ для измерения температуры наружного воздуха представляет собой сопло Лаваля, которое устанавливается своей продольной осью вдоль вектора скорости набегающего потока.
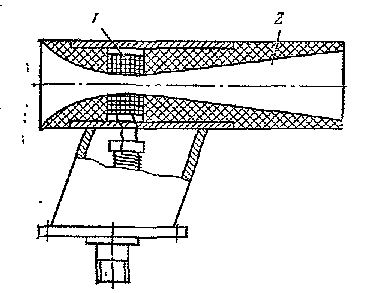
Рис.4 Конструкция датчика типа ТНВ
Термочувствительный элемент 1 состоит из изолированной никелевой проволоки, намотанной на медный каркас. Такая конструкция датчика при скорости ЛА, соответствующей М ≥ 0,5, обеспечивает в узком сечении сопла скорость течения воздуха, равную скорости звука в этой среде. На основе знания температуры ЧЭ tТ и числа М определяется температура невозмущённого потока среды
T = tТ / 0,978 (1 – 0,2 М 2)
Третья методическая погрешность снижается подбором параметров измерительной схемы с целью уменьшения тока I, проходящего через ЧЭ.
Динамическая погрешность, которая свойственна терморезисторным термометрам, объясняется тем, что датчик, обладая определённой теплоёмкостью, не может мгновенно реагировать на изменение температуры среды, а делает это с конечной скоростью, определяемой конструкцией датчика. Погрешности указателя подобны погрешностям логометра ЭДМУ. Общая суммарная погрешность термометров типа ТУЭ составляет ± 3%.
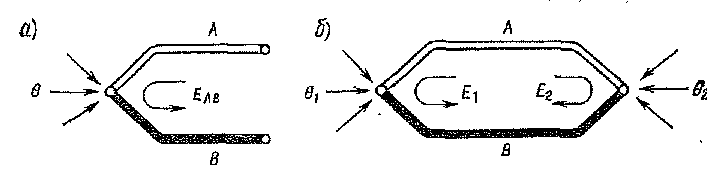 Термоэлектрические термометры. Принцип их действия основан на термоэлектрическом эффекте возникновения термоэлектродвижущей силы в термопаре при наличии разности температур её спаев. Термопара, которая является ЧЭ термоэлектрического термометра, состоит из двух разнородных проводников, соединённых между собой путём спайки, сварки или оплавления.
Термоэлектрические термометры. Принцип их действия основан на термоэлектрическом эффекте возникновения термоэлектродвижущей силы в термопаре при наличии разности температур её спаев. Термопара, которая является ЧЭ термоэлектрического термометра, состоит из двух разнородных проводников, соединённых между собой путём спайки, сварки или оплавления.
Рис.5 Термоэлектрические термометры
Для термопары термо-э.д.с. равна алгебраической сумме разностей потенциалов всех спаев. В термопаре, имеющей два спая, термо-э.д.с.
ЕАВ = (φА – φВ) + (φВ - φА) = f (t1) – f (t2).
где, φА и φВ – потенциалы проводников А и В соответственно;
t1 – температура исследуемой среды или температура горячего спая;
t2 – температура окружающей среды или температура холодного спая.
Для многих металлов возможна аппроксимация предыдущего выражения
ЕАВ = k (t1 - t2)
где, k – коэффициент пропорциальности, зависящий от материалов термопары.
Если температура холодного спая равна нулю, то зависимость термо -э.д.с. от температуры горячего спая ЕАВ = kt1 при t2 = 0.
В авиационных термоэлектрических термометрах наибольшее применение нашли следующие термопары:
хромель – копель (Х-Л), хромель – алюмель (Х-А), никель – кобальтовый сплав – специальный алюмель (НК-СА) и железоникелевый сплав – специальный копель (НЖ-СК).
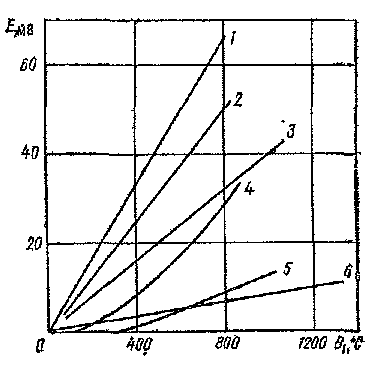
Рис.6 График статических характеристик
На графике представлены статические характеристики наиболее применяемых термопар при температуре холодного спая, равной 00 С, из которых видно, что термопары НК-СА и НЖ-СК имеют зоны нечувствительности, т.е. возникновение термо-э.д.с. у них начинается только при определённых температурах, для термопары НК-СА при t1>3000 С, для НЖ-СК при t1>1000 С. Благодаря этому свойству в указанных термопарах колебания температуры окружающей среды от +60 до - 600 С практически не оказывают влияние на значение термо - э.д.с. Следовательно, термометры, построенные на их основе, не имеют методической погрешности, которую вносит изменение температуры холодного спая.
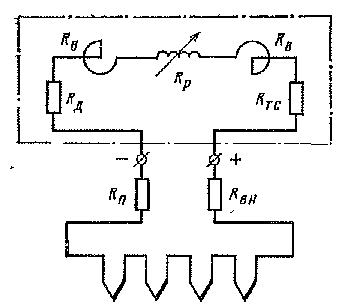
Рис.7 Электрическая схема термобатареи
Для измерения температуры могут быть использованы как отдельные термопары, так и термобатареи – соединение из нескольких термопар. Термобатареи измеряют температуру в различных точках среды и развивают термо-э.д.с., соответствующую средней измеренной температуре. Типовая электрическая схема авиационного термометра представлена на схеме. Такая схема относится к измерительным цепям прямого преобразования.
Для уменьшения числа холодных спаев, являющихся источниками паразитных термо-э.д.с., в рассматриваемых схемах стремятся уменьшить число разнородных проводников. Поэтому провода, соединяющие термопару и указатель, изготавливают из тех же материалов, что и электроды термопар. В тех случаях, когда термопары состоят из благородных металлов, на изготовление проводов идут материалы с термоэлектрическими свойствами, подобными свойствам термопары. Соединительные провода для комплектов термопар НС –СА и НЖ – СК изготавливают из медного провода, так как медь в паре с этими термопарами развивает малые термо-э.д.с. при значительных изменениях t2.
В качестве указателей используются магнитоэлектрические гальванометры.
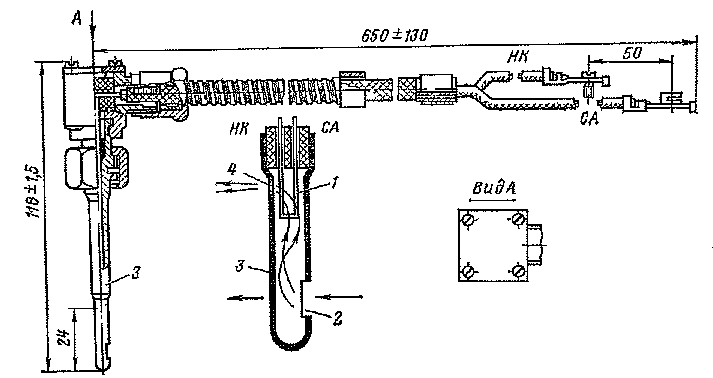
Рис.8 Термометр типа ТВГ
Термометры типа ТВГ (термоэлектрические термометры выходящих газов) нашли наибольшее применение в гражданской авиации и служат для измерения усреднённой температуры заторможенного потока газов по сечению сопла реактивного двигателя. Для этого применяют четыре последовательно соединённых термопары НК-СА низкой чувствительности. Их суммарная термо-э.д.с. пропорциональна средней температуре газов. Проходящих через сечение сопла. Электрическая схема ТВГ состоит из медных соединительных проводов RВН, манганинового сопротивления RП , термосопротивления RТС , манганинового добавочного сопротивления RД и сопротивления рамки RР из медного провода.
Особенностью конструкции датчика термометра, представленного на рисунке является наличие в защитной трубке 3 термопары 1 окна 2 большого размера для входа газов и окна 4 малого размера для выхода газов.
Такая конструкция обеспечивает измерение температуры потока газов в заторможенном состоянии. По технологическим причинам невозможно получить идентичные статические характеристики всех изготавливаемых термопар. Поэтому термопары разделяют по группам, объединяя в них термопары с одинаковыми статическими характеристиками.
Соответственно каждой группе датчиков производится градуировка шкал указателей. Как датчики, так и указатели маркируются согласно нормам групп. При эксплуатации не допускается совместная установка датчиков и указателей, относящихся к разным группам.
Указателями термометров типа ТВГ являются магнитоэлектрические гальванометры.
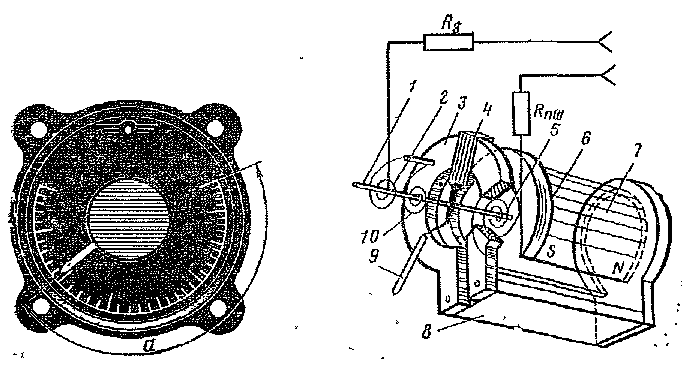
Рис. 9. Указатель термометра типа ТВГ
Указатель состоит из стержневого магнита 7 с наконечником южного полюса в виде серповидной пластины 6 и наконечником северного полюса в виде разрезанного кольца 3, связанного с полюсом магнитопроводом 8. В зазоре между наконечниками перемещается рамка 4, жёстко связанная с осью 1, к которой крепиться стрелка 9, и спиральные уравновешивающие пружины 2,5 и 10. Такая конструкция указателя обеспечивает угол отклонения стрелки до 2300. Предел измерения термометра типа ТВГ 300 – 9000 С. Погрешность в основном диапазоне замеров 45 – 7500 С не превышает ± 150 С. Основными недостатками рассмотренного прибора является наличие зоны нечувствительности до 1000 С. Следует также учитывать динамическую погрешность термометра. Постоянная времени прибора, на которую в основном влияет инерционность датчика, составляет 2 – 3 с.
С появлением ЛА больших размеров и увеличением расстояния между местами установки датчиков и указателей, а также ужесточением требований к точности измерений широкое применение получили термометры, основанные на компенсационном методе измерений.
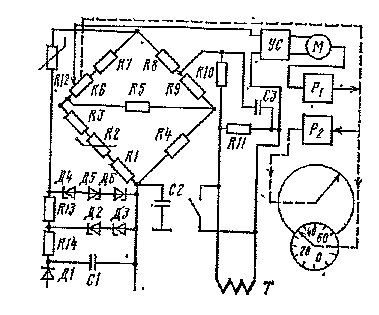
Рис.10 Электрическая схема термометра, основанного на компенсационном методе измерений
Разность термо-э.д.с., снимается с термопар Т, и напряжение компенсации, снимаемое с мостовой схемы, состоящей из резисторов R1 – R9, поступают на усилитель УС и двухфазный индукционный реверсивный двигатель М. Последний через редукторы Р1 и Р2 перемещает стрелки указателя и изменяет сопротивление R6 до тех пор, пока напряжение мостовой схемы не скомпенсирует термо-э.д.с., получаемой с термопар Т. Питание мостовой схемы осуществляется от выпрямителя, состоящего из резисторов R13, R14, диода Д1, фильтрующей ёмкости С1 и стабилизаторов Д2 –Д6.
При изменении температуры окружающей среды меняется термо-э.д.с. термопар, но одновременно меняется и напряжение диагонали мостовой схемы за счёт изменения терморезистора R2, имеющего температуру холодного спая термопар. Параметры схемы подобраны так, что они полностью взаимно компенсируются. Таким образом. В измерительную цепь указателя подаётся сигнал от термопар, соответствующий температуре их горячих спаев. Ввиду особенностей компенсационного метода измерений общие суммарные ошибки такого прибора будут составлять ± 100 С при диапазоне измерений 300 – 10000 С.
Механические манометры. В них используются методы измерения давления, в которых силы измеряемого давления непосредственно сравниваются с весом столба жидкости. Эталонного груза или с силами упругих чувствительных элементов. Механические манометры, сконструированные на основе первых двух методов, находят применение в стационарных условиях или используются как контрольные при проверке и тарировке других. При реализации третьего метода измерения давления в качестве упругих чувствительных элементов (УЧЭ) используются мембраны, мембранные коробки, сильфоны и трубчатые пружины. Их деформация зависит от значения измеряемого давления.
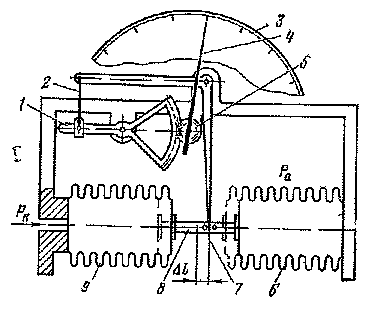
Рис.11Конструкция мановакуумметр
В мановакуумметре в качестве УЧЭ применяются манометрический и барометрический сильфоны 9 и 6. Давление рк которое измеряется, подаётся в сильфон 9. Сильфоном 6 измеряется давление ра, равное атмосферному. Под действием разности давлений происходит перемещение штока 8, отклонение рычага 7, перемещение тяги 2, поворот сектора 1, вращение трубки 5 и стрелки 4 относительно шкалы 3.
При измерении давления механическими манометрами возникают методические, инструментальные и динамические погрешности. Методическая погрешность появляется за счёт изменения абсолютного давления окружающей среды. Инструментальные погрешности возникают из-за наличия трения, люфтов в опорах и шарнирах подвижных элементов, дисбаланса подвижной системы, а также от изменения температуры окружающей среды. Последнее вызывает изменения модуля упругости материала, из которого изготовлен УЧЭ, и геометрических размеров деталей передаточного механизма. Уменьшение этой погрешности достигается с помощью биметаллических температурных компенсаторов и подбором материалов, из которых изготавливаются УЧЭ.
Динамические погрешности обусловлены запаздыванием измерений, которые зависят от параметров трубопровода, соединяющего объект контроля с механическим манометром.
Электромеханические манометры. В этих манометрах силы измеряемого давления преобразуются в перемещение УЧЭ, которые воздействуют на параметры измерительных электрических схем (сопротивление R, индуктивность L или ёмкость С). Преобразователь давления устанавливается непосредственно на объекте контроля, что позволяет отказаться от соединительных трубопроводов большой длины, избавиться от ряда погрешностей, упростить монтаж и эксплуатационное обслуживания.
Манометры типа ЭДМУ. Электрические дистанционные манометры унифицированного типа ЭДМУ имеют одинаковое устройство и элементы для всех диапазонов измеряемых давлений, за исключением УЧЭ и градуировки шкалы. Принципиальная электрическая схема приведена далее.
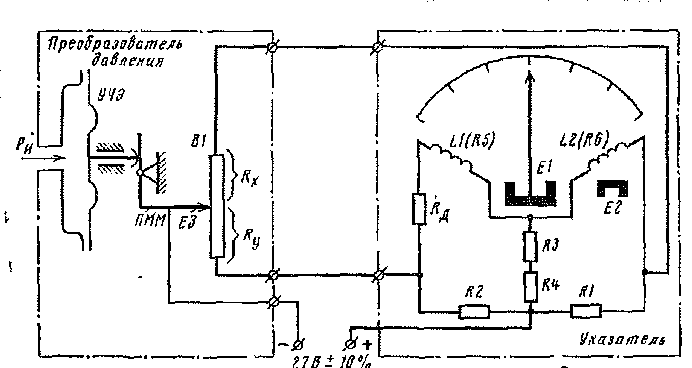
Рис.12Электрическая схемаманометра типа ЭДМУ.
Измеряемое давление ри подаётся в УЧЭ, который связан с щёткой Е3 потенциометра В1 через передаточный механизм. Значения сопротивлений Rx и Ry потенциометра преобразователя давления, меняющиеся в зависимости от давления ри, образуют два плеча мостовой схемы. Другими плечами мостовой схемы являются резисторы R1 и R2. Рамки логометра L1, L2 и резистор RД составляют измерительную диагональ моста. Общая точка соединения рамок подключена к полудиагонали, состоящей из резисторов R3 и R4. Они предназначены для компенсации температурных погрешностей, вызванных изменением сопротивления рамок логометра при колебаниях температуры окружающей среды. Рамки логометров имеют одинаковое число витков, но разные конструктивные размеры. Вследствие этого внутренняя рамка имеет меньшее сопротивление. Для обеспечения симметрии схемы в цепь внутренней рамки включено добавочное сопротивление RД. При подключении к схеме напряжения питания в случае Rx = Ry мостовая схема симметрична. Ток, протекающий по полудиагонали через резисторы R3 и R4, разветвляется на два равных тока I1 и I2 рамок L1 и L2. При нарушении равенства между Rx и Ry симметрия в схеме нарушается, вследствие чего нарушается и равенство токов. Токи I1 и I2, протекая по рамкам логометра, создают магнитные поля, характеризующиеся векторами напряжённости:
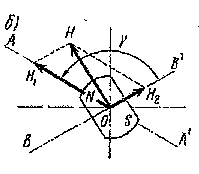
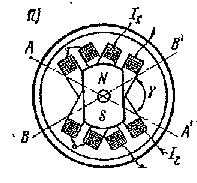
Рис.13Пояснение к принципу действия манометра типа ЭДМУ
H1 = I1 w; H2 = I2 w,
где, w – число витков каждой из рамок.
Подвижный магнит, на оси которого крепиться стрелка, располагается по направлению вектора
H = H1 + H2,
где, H – вектор напряжённости результирующего магнитного поля.
Рассмотрим далее кинематическую схему преобразователя давления.
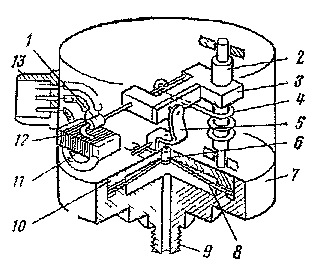
Рис.14 Конструкция преобразователя давления.
Измеряемое давление ри подаётся через штуцер 9 в полость преобразователя давления. Под действием ри происходит перемещение центра мембраны 8,толкателя 6,качалки 5, рычага 3, и щёткодержателя 13. Пружина 4 возвращает рычаг в исходное положение при уменьшении давления ри.
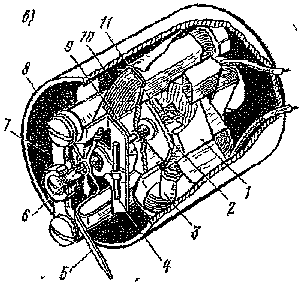
Рис.15. Конструкция логометра ЭДМУ
Конструкция логометра ЭДМУ состоит из подвижного магнита 2 и неподвижных рамок 3 и 10. Магнит 2 и стрелка 5 крепиться к оси 9, концы которой вставлены в подпятники 6. Медный корпус 1 магнитного успокоителя используется для демпфирования колебаний подвижной системы логометра.
Неподвижный магнит 4 возвращает стрелку прибора в нулевое положение при отключении напряжения питания.
Погрешности, вносимые в схему измерения датчиком давления, аналогичны погрешностям механических манометров. Погрешности, вносимые электрической схемой и указателем, возникают при изменении температуры окружающей среды, при действии на подвижную систему указателя сил трения, дебаланса и люфтов, а также от магнитного гистерезиса в материале экрана и подвижного магнита. Общая суммарная погрешность (± 4) и наличие ненадёжного скользящего контракта являются недостатками манометров этого типа.
Манометры типа ЭМ являются приборами дифференциального типа, измеряющими разность двух давлений. В качестве УЧЭ применяются гофрированные мембраны, деформация которых преобразуется в электрическую величину с помощью потенциометрического преобразователя. Указателем является четырёхрамочный логометр с подвижным магнитом.
Крайние точки потенциометра соединены накоротко, поэтому он эквивалентен круговому потенциометру. Каждая секция потенциометра соединена с соответствующим отводом рамки логометра. Напряжение питания 27 В ± 10% подаётся на щётку потенциометрического преобразователя и точку объединяющую все рамки логометра. При перемещении щётки потенциометра под действием сил давления происходит перераспределение токов в рамках логометра. В них создаются магнитные поля, характеризующиеся векторами напряженности. Подвижный магнит четырёхрамочного логометра располагается по направлению вектора напряжённости Н суммарного магнитного поля. Сопротивления R1 и R2 служат для регулировки ширины и равномерности шкалы. Применение такой схемы даёт возможность получать при малом перемещении жёсткого центра мембраны и щётки потенциометра большие углы отклонения стрелки указателя (размах шкалы достигает 2700). Это существенно повышает точность измерения давления при прочих равных условиях. Вследствие симметричности схемы прибора на показания указателя не влияют ни изменение напряжения питания, ни сопротивления рамок при колебаниях температуры окружающей среды. Суммарная погрешность прибора ± 3%. Основными недостатками манометра типа ЭМ являются наличие скользящего контакта и увеличенное число соединительных проводов, что снижает надёжность прибора, увеличивает его массу и усложняет монтаж на борту ЛА.
Манометры типа ДИМ. Недостатки потенциометрических преобразователей, связанные с износом потенциометрических преобразователей, связанные с износом потенциометра, нарушением контактов при вибрациях и колебаниях измеряемого давления, повышенных температурах, устранены в дистанционных индуктивных манометрах типа ДИМ.
Это обеспечивается применением дифференциального индуктивного преобразователя. Манометры этого типа применяются для измеряемого давления при повышенных температурах и значительных высокочастотных помех (до 700 Гц). Принципиальная электрическая схема манометра приведена на рис. 16.
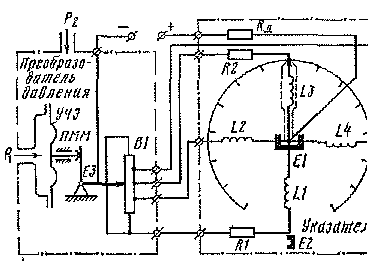
Рис.16 Электрическая схема манометра типа ДИМ
В качестве УЧЭ применяются либо гофрированные мембраны, либо мембранные коробки. Жёсткий подвижный центр УЧЭ соединён с якорем индуктивного преобразователя. Катушки индуктивного преобразователя L1 и L2 совместно с резисторами R1 и R2 образуют мостовую схему, которая работает на переменном токе 36В 400 Гц. В диагональ мостовой схеме включены рамки логометрического указателя. При измерении давления деформация УЧЭ передаётся на якорь, который изменяет воздушный зазор в магнитных цепях катушек L1 и L2. Это вызывает изменения индуктивности катушек и ведёт к перераспределению токов в рамках логометра. Так как логометр работает на постоянном токе, то в качестве выпрямителей в измерительную схему введены диоды Д1 и Д2. Максимальные погрешности манометров типа ДИМ составляет ± 4%, размах шкалы указателя 1200.
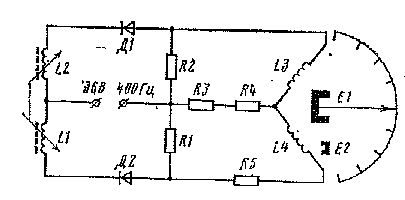
Рис.17 Электрическая схема сигнализатора давления
Сигнализаторы давления. Они предназначены для выдачи информации о наличии в системах силовых установок номинальных или критических режимов. УЧЭ 1 сигнализатора давления управляют работой контактов 4,5, коммутирующих электрическую цепь.
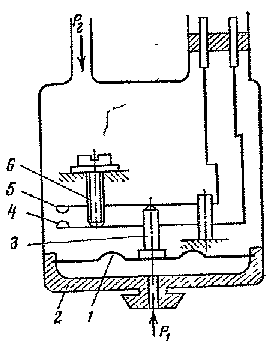
Рис.18. Конструкция сигнализатора давления
Сигнализатор давления 2 размыкает электрическую цепь с помощью упоров 3 и 6 при уменьшении разности давления Δр = р2 – р1.
Измеритель отношения давлений типа ИОД. Он предназначен для контроля тяги двигателя по отношению давлений
π =р2 / р1
где, р1 – полное давление на входе в двигатель;
р2 – давление за турбиной двигателя.
Схема прибора состоит их датчика отношения давления (ДОД) и указателя отношения давлений (УОД). Она является измерительной схемой компенсационного типа в отличие от измерительных схем прямого преобразования.

Рис.19 Электрическая схема
ДОД состоит: из рабочего сильфона 1 7, в полость которого подаётся давление р2; анероид 1, реагирующего на изменение давления р1, подаваемого в корпус датчика; контактной системы 15, служащей для управления электродвигателем 13 через усилитель 16; потенциометра 2, фиксирующего отклонение рычага 18. УОД состоит: из усилителя 8; двигателя 10; механизма обратной связи, в который входят редуктор и потенциометр 12; механизма указателя, включающего ходовой механизм, шкалу 4, механизм ленты 3 и возвратную пружину 7. Лампы Л1 и Л2 освещают шкала указателя.
При изменении режима работы двигателя, а следовательно, и изменении отношения давления подвижный контакт контактной системы 15, расположенной на рычаге 18, замкнётся с верхним или нижним неподвижным контактном, и электродвигатель 13 начнёт поворачивать анероид, изменяя угол его наклона к рычагу 18. При достижении равновесия приведённых сил сильфона и анероида происходит размыкание контактов и двигатель отключается. При этом с потенциометра 2 снимаются сигналы, пропорциональные отношению давлений. Он включён в мостовую измерительную схему указателя, содержащую потенциометр обратной связи 12 и подгоночные сопротивления 11. При разбалансе моста в диагонали возникает напряжение, которое усиливается усилителем 8 и поступает на электродвигатель 10 указателя, который уравновешивает мостовую схему с помощью потенциометрической обратной связи 12 и перемещает механизм указателя с показывающей лентой 3. При этом на шкале 4 указывается величина измеряемого отношения давлений. В случае отклонения питания или выхода из строя элементов прибора лента возвращается за нижнюю отметку шкалы возвратной пружиной 7. Подгоночные резисторы 11 позволяет произвести регулировку размаха чётно-белой границы ленты по шкале указателя. Вращением кремальеры 6 перемещается гайка со стрелкой 5 вдоль шкалы для отметки заранее установленного значения отношения давлений в точке контроля.
Термостружкосигнализаторы. Для своевременного предупреждения экипажа о появлении ненормальностей в работе подшипниковых узлов средней и задней опор ротора двигателя в нижней части камеры сгорания установлен корпус с масляными фильтрами и термостружкосигнализаторами (ТСС).
Система состоит из следующих основных элементов:
а). двух термостружкосигнализаторов 1, один из которых установлен в магистрали откачки масла от заднего подшипника ротора компрессора, другой – в магистрали откачки масла от подшипника ротора турбины;
б). сигнальной лампочки, расположенной на приборной доске в кабине экипажа.
В корпусе маслофильтра имеются два канала, один из которых соединён с полостью заднего подшипника компрессора, другой – с полостью подшипника турбины.
В каждом канале установлен маслофильтр 10 и ТСС 1, которые своими фланцами совместно крепятся к корпусу маслофильтров 11 двумя болтами.
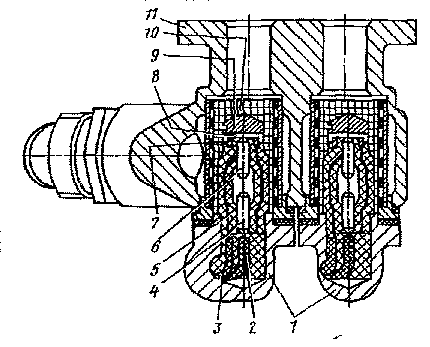
Рис.20. Конструкция маслофильтра
Корпус маслофильтров 11 своим верхним фланцем крепиться четырьмя болтами к фланцу, имеющему на нижнем ребре жёсткости корпуса камеры сгорания. Между фланцами устанавливается паронитовая прокладка.
На корпусе маслофильтров 11, кроме того, установлено два штуцера для соединения каналов корпуса трубопроводами с масляным агрегатом.
Каждый ТСС состоит из датчика, сигнализирующего о стальной стружке в откачиваемом масле, и датчика предельной температуры воздушно-масляной смеси.
Датчик наличия стальной стружки состоит из магнитного накопителя стружки, представляющего собой два постоянных магнита 4 и 6, установленных с воздушным зазором друг против друга разными полюсами. Магниты соединены проводами 2 и 3 с контактами штепсельного разъёма термостружкосигнализатора. На корпусе ТСС установлен штепсельный разъём для подключения его к электрическим цепям двигателя и самолёта.
Датчик предельной температуры расположен в верхней части корпуса 5 и состоит из корпуса 8, вставки 9 из легкоплавкого сплава и контактов, одним из которых является верхняя часть магнита 6, а другим – кольцо 7.
Вставка 9 помещается внутри конуса 8 и поддерживается тремя равноотстоящими выступами.
Кольцо 7 соединено проводом 2 с магнитом 4.
Принцип работы как датчика наличия стружки, так и термодатчика основан на замыкании минусовой цепи сигнальной лампочки системы термостружкосигнализации при появлении стружки или повышении температуры откачиваемой воздушно – масляной смеси выше допустимой величины.
При появлении металлической стружки в одной из указанных выше магистралей откачки масла между магнитами образуется замкнутая сеть, так как зазор между магнитами заполняется стружкой.
В результате этого на приборной доске в кабине экипажа загорается лампочка наличия стружки в двигателе.
В случае повышения температуры воздушно - масляной смеси в магистрали откачки из полости заднего подшипника компрессора выше 1800 С и магистрали откачки из полости подшипника турбины выше 2020 С легкоплавкие вставки расплавляются и соединяют поверхность магнитов 6 и колец 7. Образуется замкнутая электрическая цепь, которая включает лампочку в кабине пилота, сигнализирующую о наличии стружки в масле.
11. Авиационные тахометры – назначение, состав, принцип действия.
Приборы, предназначенные для измерения частоты вращения роторов авиадвигателей, называются авиационными тахометрами.
По принципу действия все тахометры можно разделить на механические и электрические.
В качестве механических тахометров на самолётах используются главным образом центробежные тахометры.
Электрические тахометры могут быть постоянного тока, переменного тока и магнитные. В некоторых случаях используются электрические импульсные и стробоскопические тахометры.
Наиболее широко на самолётах используются магнитные тахометры, шкалы которых градуируются в оборотах в минуту или в процентах по отношению к максимальной частотой вращения.
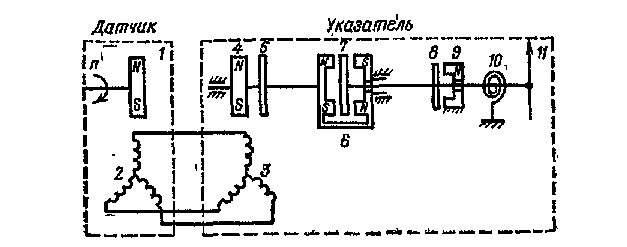
Рис.15 Магнитный тахометр
В настоящее время в авиации находятся в эксплуатации тахометрическая аппаратура ТА-6А для непрерывного дистанционного измерения угловой скорости вращения валов двух двигателей. Процентная шкала тахометров упрощает чтение показаний и освобождает лётчика от запоминания конкретных значений частоты вращения.
Датчиком служит синхронный генератор с постоянным магнитом. Обмотка генератора 2 соединена с обмоткой 3 синхронного двигателя указателя. Частота вращения вектора магнитного поля обмотки 3 пропорциональна частоте вращения ротора генератора 1, т.е. частоте вращения авиадвигателя. Частота вращения ротора синхронного двигателя 4 равна частоте вращения вектора магнитного поля статора 3. Следовательно, синхронный генератор и синхронный двигатель образуют «электрический вал», с помощью которого частота вращения авиадвигателя передаётся на магнитный узел 6. Магнитный узел имеет два магнитных пакета, между которыми помещён металлический диамагнитный диск 7, ось которого соединена со стрелкой прибора 11. Диск 7 является чувствительным элементом указателя. При вращении магнитов 6 относительно диска 7 в последнем индуктируются вихревые токи IД, значение которых пропорционально частоте вращения ротора n авиадвигателя.
Перед установкой на самолёт и в процессе выполнения 100-часовых регламентных работ каждый тахометр проверяется на работоспособность и точность измерения частоты вращения. Для этой цели применяется установка КТУ-1. Проверка комплекта тахометра сводится к сравнению его показаний с показаниями эталонного тахометра. Частоту вращения вала, с которым связаны датчики тахометра, задают с помощью фрикционного механизма от электродвигателя. Погрешность проверяемого тахометра определяется как разность между показаниями проверяемого и эталонного тахометров.
12. Аппаратура контроля вибраций турбин силовых установок и коробок самолетных агрегатов – назначение, состав, принцип действия.
Приборы контроля вибрации обеспечивают непрерывный контроль скорости вибрации двигателя и выдают сигналя о повышенной и опасной вибрации в случаях превышения её значения выше установленной нормы. Появление вибрации, внезапно возникшей и возрастающей, указывает на дефекты в двигателе. Такими дефектами могут быть разрушения приводов авиадвигателей, дисбаланс роторов компрессора, разрушения лопаток турбины или компрессора и т.д. Раннее предупреждение дефектов в двигателе позволит экипажу предпринять необходимые меры и избежать серьёзных повреждений двигателя и лётных происшествий.
Вибрация конструкций авиадвигателя описывается уравнением
SВ = aВ sin wB t,
где, SB, aB - соответственно текущее значение и амплитуда виброперемещения;
wB - частота.
Основным параметром, характеризующим вибрацию, является скорость вибрации VB = SB = aBwBcoswB t.
В авиационных виброметрах используется инерционный метод, позволяющий измерить скорость вибрации объекта относительно массы, упруго сочленённой с объектом.
В комплект аппаратуры контроля вибрации входят:
- датчики вибрации типа МВ;
- электронный блок БЭ;
- указатель виброскорости типа ИВ;
- галетный переключатель и линия связи.
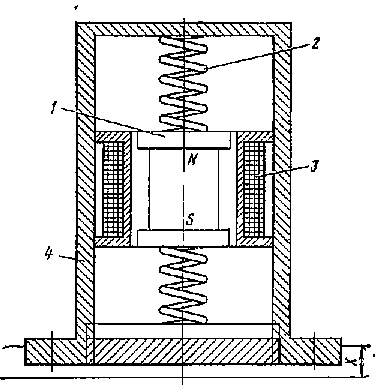
Рис.16 Датчик вибрации
Датчик вибрации представляет собой колебательную систему, состоящую из инерционной массы 1, связанной пружинами 2 с корпусом 4. Инерционной массой служит постоянный магнит. Цилиндрические пружины обеспечивают среднее положение магнита относительно катушки 3. Под влиянием возмущающей силы магнит будет перемещаться относительно катушки. При пересечении витков катушки полем постоянного магнита в катушке индуцируется э.д.с., которая пропорциональна индукции магнитного потока, числу витков, средней длине витка и скорости движения обмотки катушки относительно магнита. На двигателе устанавливаются датчика: один на передней опоре, второй – на задней. Электронный блок БЭ состоит из двух независимых идентичных каналов, каждый из которых является усилителем с полосой пропускания 50 – 200 Гц, и общего узла питания. Сигнал датчика усиливается, выпрямляется, подаётся на указатель и одновременно на ждущий мультивибратор схемы сравнения. При достижении заданного уровня виброскорости мультивибратор заставляет срабатывать электронное реле Р, которое включает сигнальную лампу Л. Указатель ИВ является микроамперметром магнитоэлектрической системы с подвижной рамкой.
Основные погрешности авиационных виброметров определяются несовпадением направления вибрации с осью датчика, изменением магнитной индукции за счёт старения и температурных изменений, наличием трения в подшипниках и ошибками указателя. Основная погрешность измерителей вибрации не превышает ± 10%.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 3256; Нарушение авторских прав?; Мы поможем в написании вашей работы!