КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Индукционный датчик
|
|
|
|
От указанных погрешностей свободны индукционные датчики магнитного курса.
Чувствительный элемент индукционного датчика представляет собой два пермалоевых сердечника с первичными обмотками, включенными встречно.
Обмотки намотаны таким образом, что магнитные потоки в первом и во втором стержнях в каждый момент равны по величине и противоположны по направлению. Следовательно, в каждый момент времени суммарный магнитный поток от двух первичных обмоток равен нулю, и он не может индуцировать ЭДС во вторичной обмотке, охватывающей оба стержня.
Суммарная напряжённость в сердечнике складывается из напряжённости, создаваемой ампер-витками первичной обмотки (первой или второй) и проекцией горизонтальной составляющей магнитного поля Земли Н на ось сердечника, т.е. Нcosα.
Если Нcosα = 0, то графики противоположных по знаку индукций В1(t) и B2(t) в сердечниках симметричны, поэтому суммарные индукции равны нулю и эдс в сигнальной обмотке не возникает.
При Нcosα ≠ 0 кривые В1(t) и B2(t) вследствии дополнительного намагничивания полем Земли изменяются так, что возникают суммарные переменные по времени индукции В∑ и следовательно ЭДС.
Величина выходного напряжения зависит от направления горизонтальной составляющей магнитного поля Земли относительно магнитного зонда.
Кроме того величина горизонтальной составляющей магнитного поля Земли зависит от географической широты места, поэтому в курсовых системах применяют компенсационный способ измерения, не зависящий от величины напряженности магнитного поля Земли и определяющий только его направление.
На рис. 2 представлена электрическая схема такого измерителя.
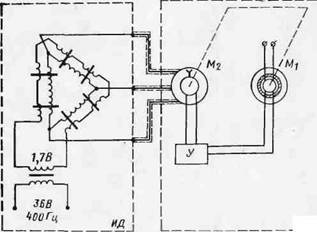
Рис. 2. Электрическая схема получения магнитного курса с помощью
индукционного датчика
Вместо одного магнитного зонда в схеме используются три расположенные в пространстве относительно друг друга под углом 120°. Датчики расположены на общем основании в двухстепенном кардановом подвесе благодаря нижней маятниковости удерживающейся в горизонтальном положении.
Вторичные обмотки включены по схеме треугольника, вершины которого соединяются с тремя статорными обмотками сельсина-приемника М.2.
Сельсин-приемник расположен в специальном блоке, называемом коррекционным механизмом (КМ). Первичные обмотки магнитного зонда питаются током с напряжением 1,7 В и частотой 400 Гц.
Магнитное поле Земли будет наводить в зондах датчика ЭДС в соответствии с их пространственной ориентацией. Поэтому потенциалы на статорных обмотках сельсина зависят от направления горизонтальной составляющей магнитного поля Земли.
Результирующее магнитное поле, создаваемое статорными обмотками сельсина, будет соответствовать направлению горизонтальной составляющей магнитного поля Земли.
С роторной обмотки сельсина М2 сигнал поступает на усилитель, а с него - на двигатель M1, поворачивающий роторную обмотку в положение, при котором напряжение на ней равно нулю.
Таким образом, рассмотренная схема следящей системы ИД-КМ преобразует сигнал, поступающий с индукционного датчика ИД, в угол поворота ротора двигателя, пропорциональный магнитному курсу.
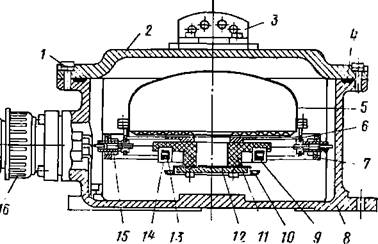
Рис. 3. Конструкция индукционного датчика ИД: 1-винт; 2-крышка;3-девиационный прибор; 4-прокладка; 5-поплавок; 6-основание; 7-наружное кольцо; 8-корпус; 9-катушка первичной обмотки; 10-чашка; 11-платформа; 12-груз; 13-сердечник; 14- катушка сигнальной (вторичной) обмотки; 15-карданов подвес; 16 -штепсельный разъем
В индукционном датчике (рис. 3) магнитные зонды с жестко связанным с ними поплавком 5 помещаются в кардановом подвесе 15 корпуса прибора 8, заполненного жидкостью (лигроин и масло МВП). Жидкость, поплавок и карданов подвес обеспечивают примерную горизонтальность магнитных зондов при кренах самолета, уменьшая ошибки от вертикальной составляющей магнитного поля Земли.
Для компенсации полукруговой девиации служит девиационный прибор 3, расположенный на крышке 2 датчика.
Следует отметить, что индукционный датчик — более совершенный магнитный измеритель, чем КИ-13, поскольку он обладает большей чувствительностью, в нем отсутствуют ошибки от увлечения и застоя, а вместе с коррекционным механизмом имеется возможность устранения четвертной магнитной девиации.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 1152; Нарушение авторских прав?; Мы поможем в написании вашей работы!