КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип построения курсовых систем и курсовертикалей
|
|
|
|
Принцип комплексного использования различных ДК реализован в навигационных устройствах, называемых курсовыми системами.
Комплексное применение ДК обеспечивает:
- взаимный контроль и корректирование показаний курса одних ДК по данным других,
- позволяет более полно использовать положительные стороны того или иного способа измерения курса,
- повысить надёжность измерений.
В состав курсовой системы входят датчики курса, устройства и приборы, обеспечивающие измерение и выдачу курса на индикаторы и потребители, количество и тип которых определяются назначением курсовой системы.
В состав курсовой системы входят: индукционный (магнитный) датчик курса (ИД), коррекционный механизм (КМ), пульт управления (ПУ), основной и запасной гироагрегаты (ГА), которые могут использоваться в режиме гироскопического (условного) или гиромагнитного датчика курса (ДК).
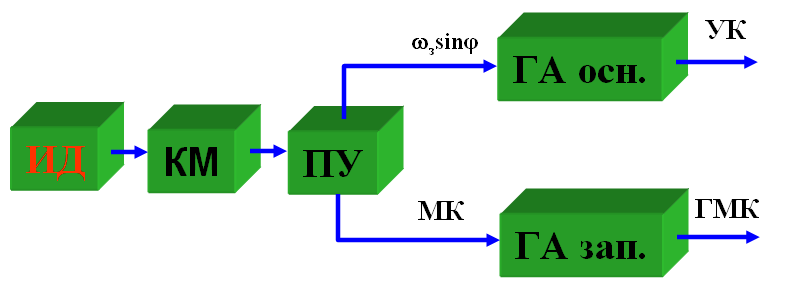
Рис.1. Принципиальная схема курсовой системы
Главным элементом курсовой системы является гироскопический датчик курса, представляющий собой трехстепенной гироскоп с горизонтальным расположением главной оси.
Исключение влияния на гироскоп суточного вращения Земли, перемещения ЛА, а также эволюций ЛА в пространстве обеспечивается кардановым подвесом.
Карданов подвес представляет собой кинематическую систему, состоящую из трех рам (рис.2.).
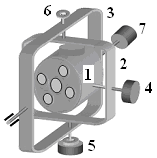
Рис.2. Принципиальная кинематическая схема курсового гироскопа
Внутренняя рама 1 является корпусом гироскопа. Ось вращения рамы располагается горизонтально. На оси рамы установлен датчик моментов (реверсивный асинхронный двигатель, моментный двигатель) 4, обеспечивающий создание момента прецессии гироскопа в азимуте.
Внешняя рама 2 обеспечивает свободу вращения гироскопа в азимуте. На оси вращения рамы установлены: датчик моментов 5, обеспечивающий стабилизацию гироскопа в плоскости горизонта; датчик углов 6 (сверху) для определения и выдачи значений курсового угла главной оси гироскопа (курса ЛА).
В качестве датчиков углов используются сельсины или синусно-косинусные трансформаторы.
Дополнительная рама 3 (рама крена) предназначена для исключения карданной ошибки измерения курса и обеспечения невыбиваемости гироскопа при эволюциях ЛА.
Карданная ошибка. При отсутствии дополнительной рамы и наличии крена ЛА произойдет наклон плоскости отсчета курса (внешней рамы с датчиком углов) относительно плоскости измерения курса, что приведет к ошибке в измерении угла.
Для устранения погрешности измерения курса гироскопическим датчиком, возникающей при кренах ЛА, на оси вращения рамы 3, совмещенной с продольной осью ЛА, установлен датчик отработки 7, удерживающий раму в вертикальной плоскости при кренах ЛА по сигналам от гироскопической вертикали (ЦГВ).
Невыбиваемость. Наличие дополнительной рамы исключает при эволюциях ЛА складывание осей вращения двух рам в одной плоскости. При совмещении осей вращения двух рам в одной плоскости исчезает степень свободы относительно третьей оси.
Если имеет место вращение относительно этой оси, то возникает возмущающий момент, вызывающий прецессию гироскопа в произвольном направлении. В результате прецессии изменится азимут главной оси гироскопа (гироскоп "выбивается"), и он становится непригодным для измерения курса.
Стабилизация главной оси гироскопа в горизонтальной плоскости осуществляется механизмом горизонтальной коррекции, состоящим из жидкостного (уровенного) или маятникового емкостного переключателя и датчика моментов. Маятниковый переключатель крепится на корпусе гироскопа так, чтобы главная ось гироскопа была параллельна уровенной поверхности.
Для современных курсовых систем скорость горизонтальной коррекции составляет 0.5 - 1.5 об/мин, что исключает воздействие кратковременных ускорений на показания курса.
Изменение азимута главной оси гироскопа за счет суточного вращения Земли. В курсовых системах и системах курса и вертикали изменение азимута главной оси гироскопа за счет суточного вращения Земли компенсируется механизмами широтной коррекции.
В курсовых системах типа КС вертикальная составляющая угловой скорости суточного вращения Земли компенсируется путем приложения корректирующего момента к гироскопу, обеспечивающего прецессию гироскопа с угловой скоростью wsinφ (w=15o/час, φ – географическая широта). Азимут главной оси гироскопа в этих системах остается постоянным.
Механизм широтной коррекции в КС состоит из функционального потенциометра wsinφ и датчика моментов, установленного на оси вращения внутренней рамы гироскопа.
В точных курсовых системах (ТКС) и системах курса и вертикали (КВ, ИКВ) широтная коррекция не выполняется. В этих системах азимут главной оси гироскопа изменяется с угловой скоростью wsinφ (из-за собственного вращения Земли).
Такой гироскоп называют свободным в азимуте, а измеряемый курс - гироскопическим (или условным).
Гироскоп не обеспечивает определение курса, а лишь моделирует на ЛА опорное направление.
Для превращения гироскопа в ДК необходимо измерить азимут его главной оси. Зная азимут опорного направления и измеряя его курсовой угол, можно рассчитать курс самолета. Процесс измерения азимута главной оси гироскопа называется выставкой курса, а уточнение азимута в полете - коррекцией курса.
Определение азимута осуществляется с использованием специального механизма азимутальной коррекции путем разворота статора сельсина-датчика (КС, ТКС, КВ) или статора дифференциального синусно-косинусного трансформатора (ИКВ) курса с контролем по шкале индикатора курса.
Вывод: таким образом, основой гироскопического датчика курса в курсовых системах является трехстепенной гироскоп, имеющий механизмы горизонтальной, широтной и азимутальной коррекции. Такой гироскоп называется курсовым. Курсовой гироскоп может работать в трех режимах формирования курса: гирополукомпаса, магнитной коррекции, астрономической коррекции.
68. Назначение, состав и режимы работы курсовой системы ГМК-1А. Устройство и работа курсовой системы в режимах «Пуск», «Контроль», «ГПК», «МК», «АС» и «ЗК».
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 1301; Нарушение авторских прав?; Мы поможем в написании вашей работы!