КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Моменты и силы, действующие в механической системе привода
|
|
|
|
Механическая часть электропривода представляет собой сложную кинематическую цепь с большим числом движущихся элементов. Каждый из этих элементов реальной кинематической цепи обладает упругостью т.е. деформируется под нагрузкой, а в соединениях элементов имеются воздушные зазоры. С учетом этих факторов расчетная схема механической части привода будет представлена многомассовой механической системой с упругими связями и зазорами.
Учитывая, что основные закономерности движения таких систем определяются наибольшими массами и зазорами и наименьшими жесткостями связей системы, можно свести расчетную схему механической части привода либо к трехмассовой, либо к двухмассовой механической системе с эквивалентными упругими связями и с суммарным зазором (или без него), приведенным к угловой скорости вала двигателя. Но и эти расчетные схемы используются тогда, когда пренебрежение упругостью и зазором приведет к ошибкам расчета (прецизионные следящие системы, механизмы с гибкими связями, длинными валами, канатами).
В большинстве практических случаев можно пренебречь зазорами и упругостью, приняв механические связи абсолютно жесткими.
При этом допущении движение одного элемента дает полную информацию о движении всех остальных элементов, поэтому движение электропривода можно рассматривать на каком либо одном механическом элементе. Обычно в качестве такого элемента принимают вал двигателя.
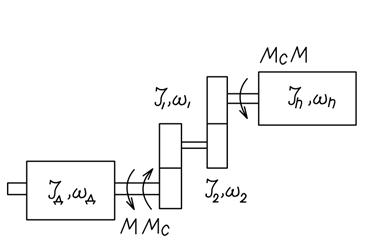
Кинематическая схема связей двигателя с исполнительным механизмом.
Расчетная схема сводится к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент сопротивления (статический момент) МС, включающий все механические потери в системе, в том числе механические потери двигателя. Момент сопротивления механизма МСМ состоит из двух слагаемых; соответствующих полезной работе и работе трения. Моменты приложенные к механической системе со стороны двигателя, называются движущими, а со стороны нагрузки – моментами сопротивления. Моменты сопротивления разделяют на активные и реактивные.
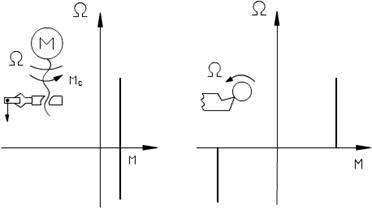
Активные – обусловлены воздействием на электромеханическую систему привода внешних сил (например, сила тяжести). Эти моменты не зависят от направления движения и, как правило, не зависят от скорости. Активный момент сохраняет свой знак при изменении направления вращения привода.
Реактивные – возникает как реакция на движение исполнительного органа привода. Они обусловлены силами трения и технологическими условиями (например, силами резания)
Реактивные моменты всегда действуют противоположно движению, реактивные моменты меняют знак.
Реактивные моменты сопротивления, связаны с технологическим процессом и представляют собой нелинейную функцию скорости
 ,
,
но в АЭ считают, что технологическое усилие постоянно, а следовательно МС= const. Реактивные моменты могут быть вызваны вязким или сухим трением в механической системе привода.
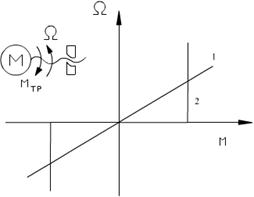
Моменты вязкого трения пропорциональны скорости
 ,
,
где β – коэффициент пропорциональности, зависящий от конструкции механической системы.
Момент сухого рения постоянен (не зависит от скорости) и меняет знак при изменении направления вращения.
|
|
|
|
|
Дата добавления: 2014-12-24; Просмотров: 1099; Нарушение авторских прав?; Мы поможем в написании вашей работы!