КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические переходные процессы в электроприводах
|
|
|
|
В простейших электромеханических системах привода пренебрегают электрическими переходными процессами, т.к. изменения тока в цепях ЭД происходит быстрее изменения скорости. Решение уравнения движения привода можно значительно упростить если предположить, что момент сопротивление от скорости не зависит, а механическая характеристика привода линейна. В этом случае динамический момент МДИН(Ω) представляет собой линейную функцию скорости. Для привода с линейной механической характеристикой
 .
.
Подставляя это выражение в уравнение движения привода (1) получим и
 (3)
(3)
где
 - электромеханическая постоянная времени.
- электромеханическая постоянная времени.
Это выражение: линейное неоднородное дифференциальное уравнение первого порядка.
Уравнение (3) содержат только механические параметры и представляет собой механическую модель электромеханического привода. Электрические параметры в такой модели явно не присутствуют. При установившемся режиме  и угловая скорость установившегося режима Ω=ΩУ. Для установившегося режима из (3) получим
и угловая скорость установившегося режима Ω=ΩУ. Для установившегося режима из (3) получим
и
 (4)
(4)
Решение (4) при начальных условиях Ω(0) = Ωнач имеет вид
 (5)
(5)
Если начальная угловая скорость равна нулю, то
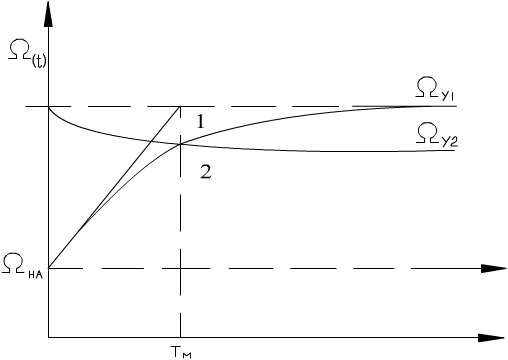
Графики изменения скорости в переходном процессе при разгоне привода от начальной скорости до установившегося значения(кривая 1) представлен на рисунке. Формула (5) позволяет определить изменение скорости привода при изменении момента сопротивления. При этом произойдет изменение установившейся скорости от
До 
Если МС2 > МС1, то ΩУ2 < ΩУ1 в результате

Кривая (2) показывает как изменяется скорость при увеличении нагрузки. Электромеханическая постоянная времени ТМ определяет темп механических переходных процессов в приводе. При t=Tм скорость привода Ω = 0.632ΩУСТ. Это соотношение часто принимают за определение электромеханической постоянной времени. Если провести касательную к графику Ω(t) в точке Ω(0) до пересечения с уровнем установившейся скорости, то абсцисса точки пересечения будет равна электромеханической постоянной времени. Отсюда вытекает другое определение Tм , как времени разгона электропривода до установившейся скорости при постоянном ускорении, равном начальному. Время переходного процесса определяется из уравнения движения привода
Время переходного процесса, необходимое для изменения скорости привода от Ω = Ω1 до Ω = Ω2
Для вычисления этого интеграла, надо знать зависимость движущего момента и момента сопротивления от скорости. В простейшем случае можно принять момент инерции величиной постоянной:
J = const, M = const, MC = const,
Тогда:
По этой формуле можно определить время пуска привода под действием постоянного момента при постоянном моменте сопротивления. При этом Ω1 = 0 Ω2 = ΩНОМ
Отсюда:
При торможении привода момент движения меняет знак и время торможения
При постоянстве моментов и момента инерции
Время торможения от номинальной скорости Ω1 = ΩНОМ до скорости Ω = 0,
Время переходного процесса электропривода, имеющего линейную МХ при постоянном моменте сопротивления можно определить из уравнения изменения скорости. Для этого положим в (5) ΩНАЧ = Ω1 и Ω = Ω2 и решим это уравнение относительно времени переходного процесса:
При ΩУ = Ω2 этой формулой пользоваться нельзя. В этом случае приближенно принимают tП = (3…4)ТМ.
Механическая характеристика асинхронного двигателя существенно не линейна поэтому достаточно простое выражение для времени переходного процесса tПП можно получить только для случая, когда МС = 0. Приближенное время для пуска двигателя
Для случаев, когда МС ≠ 0 применяют приближенные методы решения уравнения электропривода.
|
|
|
|
|
Дата добавления: 2014-12-24; Просмотров: 2205; Нарушение авторских прав?; Мы поможем в написании вашей работы!