КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Машини для внесення рідких органічних добрив
|
|
|
|
Для поверхневого внесення рідких органічних добрив при транспортуванні їх на віддаль до 2 км використовують машини РЖУ-3,6А, РЖТ-4М та МЖТ-Ф-6; до 5 км - МЖТ-10, МЖТ-Ф-13, МЖТ-Ф-19; до 10 км -МЖТ-16 і МЖТ-Ф-19. Для внутрішньоґрунтового внесення використовують агрегати АВВ-Ф-2,8 АВО-Ф-2,8 і АВМ-Ф-2,8.
Машина для внесення рідких органічних добрив МЖТ-10 призначена для самозавантажування, транспортування, перемішування і розливання рідких органічних добрив по поверхні поля, а також для перевезення технічної води, браги та інших неагресивних рідин.
Основними вузлами машини є цистерна 8 (рис. 2.22), відцентровий насос 14, вакуумна установка 13, заправний рукав 7, змонтований на поворотній штанзі 6, напірний трубопровід 11, перемикаючий 9 і розливний 10 пристрої, запобіжний 5 і рідинний 4 клапани, ходова частина 12, зчіпний пристрій і гідросистема. Цистерна циліндричної форми з еліптичними днищами має верхній та нижній люки з кришками і поплавковий рівнемір 1. Вакуумна установка складається з двох насосів ротаційного типу і призначена для створення розрідження в цистерні при заправці. Всмоктувальний колектор насосів з'єднується трубопроводом з корпусом запобіжного рідинного клапана 4, всередині якого розміщено дві порожнисті кулі.
Відцентровий насос приводиться в дію від ВВП трактора і перекачує рідину з цистерни в напірний трубопровід. Насос прикріплюється до фланця патрубка цистерни і складається з корпуса та робочого колеса з лопатями.
Для налагодження машини для виконання різних операцій змонтовано перемикаючий пристрій. Він складається з верхньої заслінки 15 (рис. 2.22, б), розміщеної з внутрішнього боку резервуара, нижньої заслінки 22, гідроциліндра 17, важеля 16, тяги 18, змонтованих на патрубку 23. Останній з'єднує напірний трубопровід 11 з внутрішньою порожниною цистерни.
Розливний пристрій забезпечує дозування і розподіл рідких добрив по поверхні поля. Він складається з патрубка 19, засувки 20 і розподільного щитка 21, нахил якого можна змінювати. Машина може самозавантажу-ватись рідкими органічними добривами з гноївкосховища, перемішувати їх під час транспортування і вносити на поле.
Самозавантаження. Заслінкою 22 перекривають патрубок розливного пристрою і за допомогою гідроциліндра опускають у гноївкосховище штангу 6 з рукавом 7, включають вакуумну установку 13. За рахунок утворюваного до 0,061 МПа розрідження рідина через рукав 7 надходить у цистерну 8. При досягненні рідиною верхнього рівня куля клапана 4 піднімається до упору в патрубок вакуумного трубопроводу і надходження добрив припиняється. Після заповнення цистерни штанга встановлюється в транспортне положення, вакуумна установка відключається.
Перемішування. Гідроциліндром закривають заслінку 22 і відкривають заслінку 15. При включенні в роботу насоса рідина з резервуара надходить у насос і по трубопроводу 11 і патрубку 23 - в резервуар. Внаслідок циркуляції по колу рідина перемішується. Це запобігає розшаруванню рідини і утворенню осаду.
Внесення добрив. Включають у роботу відцентровий насос 14, який подає рідину по трубопроводу 11 в розливний пристрій 10. Закривають заслінку 15 і відкривають заслінку 22. Рідина при цьому виходить з великою швидкістю через отвір у засувці 20 і потрапляє на щиток 21. За рахунок удару в щиток рідина розподіляється віялом (шириною 6-12 м) по поверхні поля.
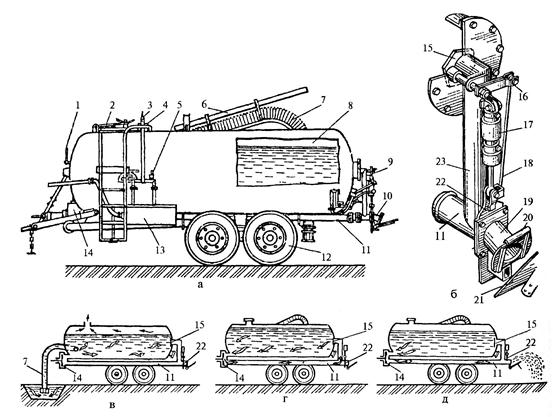
Рис. 2.22. Машина МЖТ-10:
а - загальний вигляд; б — перемикаючий розливний пристрій; в - схема заправки; г - схема перемішування; д - схема розливання добрив; 1 - рівнемір; 2 — люк; 3 — вакуумметр; 4 — запобіжний рідинний клапан; 5 - клапан запобіжний вакуумний; 6 - штанга; 7 - заправний рукав; 8 - цистерна; 9 - перемикаючий пристрій; 10 -розливний пристрій; 11 – напірний трубопровід; 12 - ходові колеса; 13 - вакуумна установка; 14 – відцентровий насос; 15, 22 - заслінки; 16 - важіль; 17 - гідроциліндр; 18 - тяга; 19 і 23 — патрубки; 20 — змінна засувка; 21 —розподільний щиток
Дозу внесення добрив регулюють встановленням змінних засувок діаметром 60, 90 і 110 мм, а також зміною швидкості руху агрегату і кута встановлення розподільного щитка. При внесенні 40-60 т/га добрив працюють без засувок. Агрегатують машину МЖТ-10 із тракторами Т-150К.
Машини ЗЖВ-Ф-3,2, РЖУ-3,6А, РЖТ-4М, МЖТ-Ф-6, МЖТ-Ф-13, МЖТ-16 і МЖТ-Ф-19 призначені для самозавантаження, транспортування, перемішування і суцільного поверхневого розподілу рідких органічних добрив, їх будова і робочий процес подібні до МЖТ-10.
Агрегати для внутрішньоґрунтового внесення рідких органічних добрив АВВ-Ф-2,8, АВО-Ф-2,8 і АВМ-Ф-2,8 призначені для внесення рідких органічних добрив та органо-мінеральних сумішей вологістю не менше 92% на певну глибину у ґрунт.
Агрегат АВВ-Ф-2,8 складається з машини МЖТ-10 і начіпного пристрою для внесення добрив у ґрунт на луках, пасовищах і староорних полях. Пристрій має раму 8 (рис. 2.23), чотири секції 6, які приєднуються до рами за допомогою паралелограмної підвіски, розподільного пристрою 2 і гідроциліндра 9. На секціях встановлені дисковий ніж 7, плоскорізальна лапа 5 з підживлювальною трубкою 4 і прикочувальний коток 3.
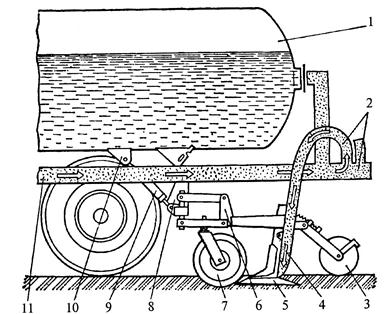
Рис. 2.23. Схема агрегату АВВ-Ф-2,8:
1 — цистерна; 2 — розподільний пристрій; 3 - прикочувальний коток; 4 - підживлювальна трубка; 5 - лапа; 6 - секція; 7 - дисковий ніж; 8 - рама; 9 - гідроциліндр; 10 - кронштейн; 11 - напірний трубопровід
При внесенні добрив насос 14 (див. рис. 2.22) подає їх по напірному трубопроводу 11 (див. рис. 2.23) до розподільного пристрою 2, з якого по гнучких рукавах вони надходять у підживлювальні трубки 4, закріплені на лапах 5. Ніж 7 розрізає верхній задернілий шар ґрунту, полегшуючи стійкий хід лапи в заглибленому положенні. Лапа 5 дещо піднімає скибу і загортає під неї рідкі добрива на глибину 12-18 см. Коток, що йде слідом, ущільнює ґрунт.
Глибину внесення добрив у ґрунт регулюють переставлянням котків і стисканням натискних пружин. Норму внесення рідких добрив (50-100 т/га) регулюють зміною дозувальних шайб і швидкості руху.
Робоча ширина захвату агрегату - 2,8 м, швидкість - до 6 км/год. Агрегатують АВВ-Ф-2,8 із тракторами Т-150К, обслуговує його тракторист.
Агрегат АВО-Ф-2,8 на базі машини МЖТ-10 забезпечує внесення рідких органічних добрив при основному безполицевому обробітку ґрунту. Пристрій агрегата має дві плоскорізальні лапи, які підрізують шар ґрунту і під цей шар вносяться добрива на глибину 12-18 см. Ширина внесення - 1,83 м. Робоча швидкість - до 6 км/год.
Агрегат АВМ-Ф-2,8 застосовують для внесення добрив у ґрунт при обробітку міжрядь 70 і 90 см і для поверхневого внесення. На раму агрегата навішений просапний культиватор, до робочих органів якого подаються рідкі добрива. Ширина захвату при поверхневому внесенні 6-12 м.
2.11. Підготовка машин для внесення добрив до роботи
Перевіряють технічний стан машин. Обслуговування та регулювання на задану дозу внесення добрив. При технічному обслуговуванні звертають особливу увагу на надійність кріплень вузлів і деталей, наявності оливи в картерах редукторів та відсутності її підтікання, перевіряють надійність роботи гідравлічної, пневматичної та електричної систем машин. Роблять пробний запуск машин і приступають до регулювання машин на задану норму, встановлюючи у певне положення регулятори внесення добрив залежно від вибраної ширини, робочого захвату та швидкості руху агрегату.
Після проведених регулювань встановлюють фактичну дозу внесення добрив. Для цього завантажують у місткість певну кількість добрив. При внесенні органічних добрив зважують машину на автомобільних вагах, кузов завантажують добривами і знову зважують. За різницею показників знаходять масу добрив у кузові.
Включають передачу, що відповідає заданій нормі, і вносять добрива на полі до повного спорожнення бункера, цистерни чи кузова. Вимірюють ширину смуги внесення і довжину пройденого шляху. Фактичну дозу внесення добрив (2 (т/га) визначають за формулою:
Q= 
де G - маса завантажених у кузов добрив, т; В - ширина смуги внесення, м; L - довжина шляху, м.
Якщо фактична норма внесення добрив відрізняється від заданої більш, ніж на 10%, вносять відповідні корективи.
В машинах для внесення рідких добрив відповідність фактичної норми виливу заданій досягається зміною швидкості пересування агрегату, тиску рідини, встановленням змінних розподільних пристроїв тощо. Перевірку можна виконувати також, порівнюючи фактичну довжину шляху розсіяних добрив з розрахунковою Ь, м. Заміряна після внесення добрив довжина шляху повинна дорівнювати розрахунковій:
LP= 
Якість роботи машин повинна забезпечувати виконання агротехнічних вимог, які визначаються за двома основними показниками: фактична доза внесення і ступінь рівномірності розподілу добрив по площі поля.
Крім того, враховують перекриття суміжних проходів (до 6% від ширини захвату агрегату), якість обробки поворотних смуг, огріхи і т.д.
Для високоякісного внесення мінеральних добрив бажано використовувати слідопокажчик СВА-1, який має пінний маркер барботажного типу для утворення сліду під час руху агрегату та візирний пристрій для контролю відстані між суміжними проходами.
2.12. Перспективи розвитку машин для підготовки і внесення добрив
Перспективним напрямком розвитку машин для внесення добрив є застосування комп'ютерної техніки та інформаційних технологій.
Автоматизовані технології точного землеробства дозволяють точно визначити необхідну кількість мінеральних та органічних добрив, які необхідно внести на ту чи іншу ділянку поля. Такі технології базуються на обробці інформації, яка буде використовуватись при приготуванні та внесенні добрив.
В наш час з кожним роком все ширше мають розвиток системи точного землеробства. Найбільш відомі системи - це "AGROCOM" фірми "СLASS", інтегрований комплекс PLOТ/PLAN фірми RDS, а також обладнання корпорації АГКО, "АМАZONE" та програмне забезпечення Fieldstar.
Для забезпечення функціонування системи точного землеробства (СТЗ) застосовують Глобальну Систему Позиціонування (ГСП) та Географічну Інформаційну Систему (ГІС). ГСП базується на системі навігації, яка дозволяє визначити місце машинно-тракторного агрегату (МТА) в полі з точністю до 2 м. Кабіна МТА обладнана приймачем сигналів ГСП із супутників, який передає ці сигнали на бортовий комп'ютер. Інформація з комп'ютера може оброблятись в стаціонарних умовах за допомогою ГІС.
Збирання "інформаційного врожаю" проводиться за допомогою спеціальних датчиків, встановлених на МТА, при виконанні різних механізованих технологічних операцій, наприклад, обробітку ґрунту, збиранні сільськогосподарських культур. На базі "інформаційного врожаю" здійснюється керування механізованим процесом вирощування сільськогосподарських культур для наступного року на таких технологічних операціях, як сівба, внесення добрив, пестицидів тощо. Керування проводиться з врахуванням геовизначених картограм, що дає можливість вносити в конкретну точку поля оптимальну норму технологічних матеріалів. Технічно це здійснюється автоматично за допомогою спеціальних дозуючих систем сільськогосподарських машин у процесі роботи.
Машина для внесення добрив повинна бути обладнана автоматичною системою зміни норми залежно від координат МТА в процесі роботи. Внесення добрив при СТЗ проводиться на основі картограм внесення поживних речовин.
На рис. 2.24 зображена схема керування машиною для внесення добрив із змінними дозами КРК та мікроелементів (МК). За допомогою ГІС для кожного поля розробляються картограми внесення азоту N. фосфору Р, калію К і мікроелементів МК. Бортовий комп'ютер залежно від координат МТА на полі встановлює автоматично норми внесення КРК та МК.
Система зміни норми внесення добрив складається із дозатора азотних добрив 6, дозатора фосфорних добрив 5, дозатора калійних добрив 4 та дозатора мікроелементів 3. По конструкції дозатори можуть бути котушкового типу, вібраційні або з мікропроцесорним керуванням, наприклад, як у сівалок "Клен".
Привід дозаторів від крокових електродвигунів 2 потужністю 250 Вт та напругою 12В. Частота обертання крокових електродвигунів задається блоком 10 від норми внесення добрива і швидкості руху МТА. Для врахування швидкості руху МТА на роботу дозаторів опорне колесо 8 обладнане генератором імпульсів 9.
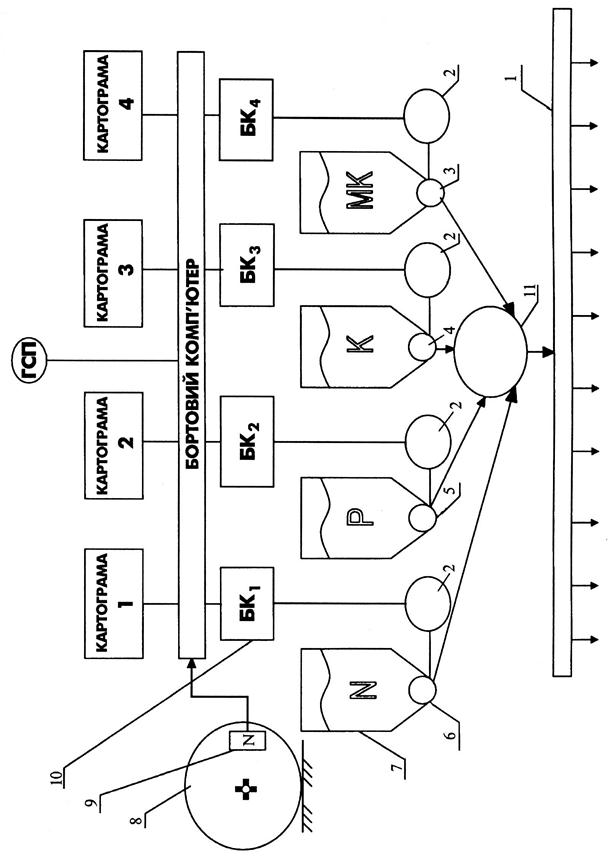
Рис. 2.24. Схема керування машиною для внесення зміннних доз добрив:
1 - розподільний пристрій машини; 2 — електродвигун; 3, 4, 5 і 6 — дозатори; 7 - бункер; 8 — опорне колесо; 9 - генератор імпульсів; 10 — блок керування електродвигунів; 11 — змішувач
Дана система дає можливість автоматично змінювати норму внесення добрив в широких межах. Добрива від дозаторів 3; 4; 5; 6 подаються до змішувача 11 з наступним внесенням робочими органами машини. Спосіб внесення добрив залежить від принципу роботи машини для внесення добрив.
Аналогічну схему керування можна застосувати для внесення органічних добрив. Привід дозуючого транспортера може бути від гідродвигуна, який розвиває значно більші крутні моменти.
|
|
|
|
|
Дата добавления: 2014-12-27; Просмотров: 9124; Нарушение авторских прав?; Мы поможем в написании вашей работы!