КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Модуль 4
|
|
|
|
R5
R6
R4
R2 R1
R3
R1
ЗЦМ
План
1. Зміст поняття вага тіла. Загальний центр маси (ЗЦМ) тіла та центри мас (ЦМ) окремих біоланок.
2. Головні поняття біостатики. Різновиди рівноваги.
3. Теорема ВАРІНЬОНА.
4. Практичне заняття. РГР № 1. Визначення координат ЗЦМ аналітичним методом.
5. Практичне заняття. РГР № 2. Визначення координат ЗЦМ графічним методом.
6. Практичне заняття. РГР №3. Основні критерії стійкості тіла людини та їх вплив на збереження рівноваги.
Література:1. Носко М.О. "Біомеханіка ФВС, підручник.- Київ 2012, с.67-70
2. Носко М.О., Архипов О.А. Біометрія РДЛ. - Київ 2012, с. 23-29, 34-45.
3. підручник: Архипов О.А. « Біомеханічний аналіз».- НПУ, 2010, с. 33-50.
1. Поняття вага тіла витікає з формули P = mg (Н), де m - маса тіла, g - прискорення вільного падіння, g = 9,8 м/с2, іншими словами вага тіла - це статична сила, яка давить на підлогу чи підложку, під дією гравітації (сили земного тяжіння).
Під загальним центром мас тіла (ЗЦМ) - розуміється точка докладання рівнодійної всіх діючих сил. У результаті досліджень виявлено, що в основній стійці точка ЗЦМ знаходиться на вершині остистого відростку п'ятого хребця хребта (точка L 5, чи, за новою класифікацією: точка між 20-21 біопарами хребта). При зміні положення тіла, у кожний момент часу, ЗЦМ також змінює своє положення відповідно розташуванню біоланок. Для того, щоб це довести розрахуємо координати ЗЦМ всього тіла у положенні присід у сагітальній площині у РГР № 1, 2.
2. За певних умов тіло людини може зберігати розташування біоланок та всього тіла у просторі. Такі рухи в біомеханіці називають рухами на місці. Якщо всі біоланки зберігають постійні координати, то це означає, що тіло знаходиться у відносно нерухомому стані (біостатична поза тіла). В біомеханіці такі положення вивчають у розділі Біостатика, яку ще називають окремим розділом біомеханіки. Вона базується на основних фундаментальних поняттях теоретичної механіки - статики. В цьому розділі вивчається рівновага тіл, що перебувають під дією системи сил. Під рівновагою прийнято розуміти таке положення тіла, коли сили, що діють на нього зрівноважені. Важливим є той факт, що тіло людини на 80 % від усіх рухів статичних положень (рухів на місці) у кожний момент часу втрачає рівновагу, а потім її встановлює. У теоретичній механіці відомі слідуючи поняття рівноваги:
 1. Стійка рівновага, коли під дією зовнішніх сил тіло буде повертатися в положення рівноваги. Це можливо коли загальний цент мас знаходиться нижче точки опори.
1. Стійка рівновага, коли під дією зовнішніх сил тіло буде повертатися в положення рівноваги. Це можливо коли загальний цент мас знаходиться нижче точки опори.
2. Нестійка рівновага, коли під дією зовнішніх сил тіло втрачає рівновагу. Це можливо, коли загальний центр мас знаходиться вище точки опори.
 |
3. Байдужа рівновага, коли тіло зберігає рівномірний поступальний рух, а рівнодійна сила зовнішніх сил дорівнює нулю.
 |
4. В біостатичному аналізі тіла людини розглядається 4-й різновид рівноваги - умовно стійка чи умовно нестійка рівновага тіла людини. Це можливо, коли проекція ЗЦМ знаходиться у крайньому положенні площі опори.
 |
Sопори
У такому положенні рівновага тіла людини зберігається завдяки високій міжм'язовій координації, технічній майстерності при виконанні вправ на рівновагу. Головні кількісні критерії контролю визначаються за допомогою стабілографії, їх 3:
1) чим більше час утримання рівноваги (tЗЦМ) в заданій біостатичній позі (БП), тим краще розвинений вестибулярний аналізатор, тому tЗЦМ → max;
2) чим менше амплітуда коливань ЗЦМ (АЗЦМ) у фронтальній та сагітальній площинах, тим краще розвинений вестибулярний аналізатор, тому АЗЦМ → min;
3) чим більше частота коливань ЗЦМ (γЗЦМ), або кількість коливань ЗЦМ в одиницю часу у фронтальній та сагітальній площинах, тим краще розвинений вестибулярний аналізатор:
γЗЦМ = n/t (гц) → max.
Сучасні дослідження свідчать про те, що частота коливань ЗЦМ є головним чинником розвитку міжм`язової координації і вестибулярного аналізатору та знаходиться в межах:
- у звичайної людини - 4-6 гц, 4-6 коливань у сек.;
- у спортсменів - 10-12 гц, 10-12 коливань у сек.;
- окремі види спорту - 15-18 гц, 15-18 коливань у сек.;
- акробати-еквілібристи - 20-25 гц, 20-25 коливань у сек.
Іншими словами це означає, що чим більше частота коливань ЗЦМ (γЗЦМ) при виконанні вправ на рівновагу, тим більше разів за одиницю часу тіло людини повертається у положення стійкої рівноваги. Тому ймовірність падіння зменшується і якість виконання вправи висока.
Оскільки тіло людини весь час знаходиться у положенні нестійкої рівноваги, головним завданням біостатики є визначення координат ЗЦМ у кожний момент часу та кількісних критеріїв стійкості.
Біостатика тіла людини базується на 4 аксіомах:
1). Дві сили прикладені до тіла зрівноважуються, якщо вони діють на одній прямій у протилежні боки та рівні за величиною:
 |
F1
F2
2). Рівновага не порушиться, якщо до діючої системи тіл додати, або відняти зрівноважену частину тіл.
F1 m DF = F2 m DF
 |
3). Рівнодійна двох сил прикладених до однієї точки і вектори котрих не лежать на одній прямій зображається діагоналлю паралелограма (правило паралелограма).
 |
4). Сили, з котрими два тіла діють одне на одного завжди рівні за величиною та протилежні за напрямком.
 F1 F2
F1 F2
3. В біостатиці головні методи аналізу засновані на рівновазі важелів, котрі можна виявити в біомеханічній системі ОРА. Зокрема застосовується теорема ВАРИНЬОНА: для умови рівноваги пари сил, які діють на одній прямій, сума їх діючих моментів сил = 0. Момент сили позначається формулою:
M=F d,
де d – плече сили: відрізок від точки докладання сили до точки опори.
Роздивимося малюнок, де на пряиій зображена діюча пара сил - F1, F2, їх плечі - d1, d2. Тоді за умов теореми Вариньона рівновага зберігається, коли момент діючих сил рівні, чи їх сума = 0:
М1=F1 d1, M2 =F2 d2, M1=M2: S М і = 0.
Звідси головним фізичним змістом теореми являється умова: що відношення діючих сил обернено пропорційна їх плечам:
F1/F2 = d2/d1, F1 d1= F2d2
 |
4.Практичне заняття. РГР №1.
Тема: Визначення ЗЦМ аналітичним методом.
Хід роботи:
Для визначення ЗЦМ за допомогою аналітичного методу виконаємо такий порядок дій:
1. Накреслити таблицю Брауне - Фішера для розрахунків (табл. № 1).
2. Виміряти довжини біоланок свого тіла за 14-ти сегментною моделлю Бернштейна (у см) та занести всі данні у ст. №.4 (у мм).
3. Накреслити декартову систему координат ХОУ на площині та побудувати біостатичну модель (біосхему) свого присіду у сагітальній площині з масштабом: 1:10 (мал. 9).
4. За аналітичними та антропологічними орієнтирами на біостатичній схемі відмітимо точки центрів суглобів та точки ЦМ голови та кисті.
5. Подальші пункти ходу роботи 6-11 можна виконати, як вручну таблиця Брауне - Фішера № 1, так і в автоматичному режимі таблиці № 2, № 3.
6. Визначимо вагу кожної біоланки тіла  за формулою:
за формулою:  ; (P=mg; Р=75×10=750 Н)
; (P=mg; Р=75×10=750 Н)
Голова:  Тулуб:
Тулуб: 
Плече:  Передпліччя:
Передпліччя: 
Кисть:  Стегно:
Стегно: 
Гомілка:  Стопа:
Стопа:

 Y
Y
 x (l – x)
x (l – x)


130 l
| |
110
R7: ЗЦМ (14; 72)
30
X
0 10 20 30 40 50 60 70 80
Мал. 9. Біостатична модель тіла людини: умовний присід, сагітальна площина (індивідуальний масштаб зменшення: 1:13).
Таблиця № 1. Аналітичний метод розрахунку ЗЦМ
(по Брауну – Фішеру, 1889).
| № з/п | Біоланки тіла | Відносна вага ланки, % | Абсолютна вага ланки (Рі), Н | Довжина ланки (l), мм | Відстань від проксимального кінця до ЦТ ланки, мм | Координати ЦТ ланок тіла, (мм) | Момент сили: M = F d (Н мм) | ||||
| Відносний коефіцієнт | Абсолютне значення li (мм) | ||||||||||
| Xi | Yi | 
| 
| ||||||||
| Голова | 52,5 | - | - | ||||||||
| Тулуб | 322,5 | 0,44 | |||||||||
| Праве плече | 22,5 | 0,47 | |||||||||
| Ліве плече | 22,5 | 0,47 | - | - | |||||||
| Праве передпліччя | 0,42 | ||||||||||
| Ліве передпліччя | 0,42 | - | - | ||||||||
| Права кисть | 7,5 | - | - | ||||||||
| Ліва кисть | 7,5 | - | - | - | - | ||||||
| Праве стегно | 0,44 | ||||||||||
| Ліве стегно | 0,44 | - | - | ||||||||
| Права гомілка | 37,5 | 0,42 | |||||||||
| Ліва гомілка | 37,5 | 0,42 | - | - | |||||||
| Права стопа | 0,44 | ||||||||||
| Ліва стопа | 0,44 | - | - | ||||||||

| 
| 
| |||||||||
| Σ=100 | Σ=750 Н | Σ=10749 | Σ=54115 |
Таблиця № 2. Алгоритм автоматичного розрахунку координат ЗЦМ аналітичним методом
таблиці№1 Брауна-Фішера у програмі Excel.*
Таблиця №3. Приклад автоматичного розрахунку координат ЗЦМ аналітичним методом
(за формулами табл.2)*
* - Матеріал опрацьовано разом зі студенткою НПУ ім. М.П. Драгоманова Татарінською А.О.
7. Розрахувати відстань до ЦМ (центру маси) біоланки від проксимального кінця (довжину біоланки (ст. №4) помножити на відноснийкоефіцієнт (ст. №5) і результат записати в стовп. №6).
8. Розрахувати координати центрів мас біоланок і заповнити стовпчики 7-8.
9. Знайти момент сили кожної біоланки (Р) за формулою:
 ;
;  .
.
10. Знайти суми моментів сил усіх біоланок  і
і  .
.
11. Скласти рівняння за правилом: момент сили ЗЦМ дорівнює сумі моментів сили усіх біоланок:


 ;
;  ;
;
 ;
;  .
.
Координати ЗЦМ: Хзцм ≈ 14 (мм); Узцм ≈ 72 (мм).
12. Відкласти координати ЗЦМ по Х і по Y на біостатичній моделі ( мал. 9.) і зробити висновок 1: що при зміні пози координати ЗЦМ змінюються.
Висновок 1: При зміні положення тіла координати ЗЦМ теж змінюються.
5.Практичне заняття. РГР № 2.
Тема: Визначення ЗЦМ графічним методом
Хід роботи:
1. Побудувати біостатичну модель (біосхему) присіду у сагітальній площині у масштабі зменьшення: М:1/10 ( мал. 9.).
2. Послідовно зрівноважити на біостатичній схемі ( мал. 9.):
а) кисть – передпліччя (з’єднати ЦМ цих біоланок і визначити рівнодійну силу R1 цих двох біоланок)
R1 =1+2=3

б) Зрівноважити кисть-передпліччя з плечем;
R2 = R1+3=6
в) Зрівноважити дві верхні кінцівки (2R2) з головою;
R3 = 2R2 +7=19
г) Зрівноважити руки і голову з тулубом;
R4 = R3 +43=62

д) Зрівноважити стопу з гомілкою;
R5 = 2+5=7
е) Зрівноважити стопу і гомілку із стегном;
R6 = R5+12=19

є) Зрівноважити дві нижні кінцівки (2R6) з тулубом, головою і руками (відрізок  );
);
R7 = 2R6 + R4= 38+62=100

3. Знайти на біостатичній моделі(мал. 9) координати ЗЦМ - точку R7 (ЗЦМ) → (Х ≈ 14; У ≈ 72). Зробити висновки.
Висновок 2. Доведено, що при незмінній позі, незалежно від методу розрахунку (аналітичний та графічний методи) координати ЗЦМ, співпадають.
Висновок 3. Так як, проекція ЗЦМ падає на площу опори, рівновага умовно стійка („стою, але можу впасти”).
6.Практичне заняття. РГР №3.
Тема: Визначення кількісних критеріїв стійкості.
Хід роботи:
1. Накреслити на міліметровому листі біостатичну модель свого тіла: основна стійка, руки вгору, сагітальна і фронтальна площини у масштабі 1:10 (мал. 10.)
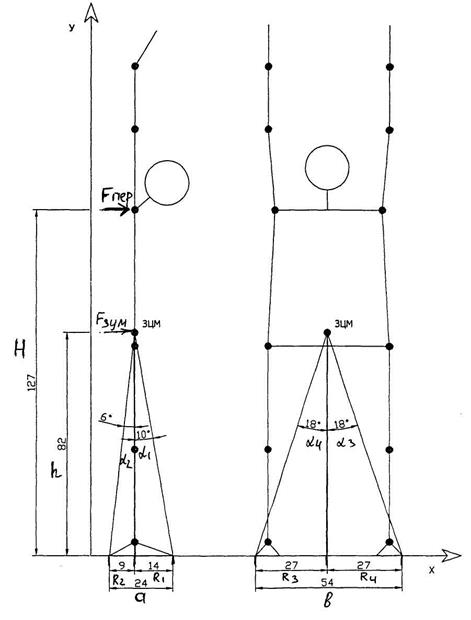
Мал.10. Біостатична модель тіла людини: основна стійка, руки
вгору, сагітальна і фронтальна площини
(індивідуальний масштаб зменшення: 1:28).
| № | Критерій | Результат |
| Висота розташування ЗЦМ, h | 1м | |
| Сагітальний розмір площі опори, l1 | 0,28м | |
| Фронтальний розмір площі опори, l2 | 0,50м | |
| Площа опори, Sоп = l1 · l2) | 0,14м2 | |
Передній кут стійкості, 
| 11º | |
Задній кут стійкості, 
| 5º | |
Лівий кут стійкості, 
| 14º | |
Правий кут стійкості, 
| 14º | |
| Вага тіла, Р | 750Н | |
| Передній радіус стійкості, R1 | 0,2м | |
| Задній радіус стійкості R2 | 0,08м | |
| Лівий радіус стійкості R3 | 0,25м | |
| Правий радіус стійкості R4 | 0,25м | |
| Передній момент стійкості, М1 | 150 Н·м | |
| Задній момент стійкості, М2 | 60 Н·м | |
| Лівий момент стійкості, М3 | 187,5 Н·м | |
| Правий момент стійкості, М4 | 187,5 Н·м | |
Перекидна сила,  , (Р/2) , (Р/2)
| 375 Н | |
| Висота докладання , Н
| 1,25м | |
| Перекидний момент, Мпер. | 570 Н·м | |
| Передній коефіцієнт стійкості, К1 | 0,26 | |
| Задній коефіцієнт стійкості,К2 | 0,10 | |
| Лівий коефіцієнт стійкості,К3 | 0,33 | |
| Правий коефіцієнт стійкості,К4 | 0,33 |
Таблиця № 4. Кількісні критерії стійкості тіла людини
2. Нанести всі лінійні показники розрахунків на біостатичну схему, а кількісні виміри занести в табл. № 4 (пункти таблиці 1–13).
3. Розрахувати моменти стійкості  (показники 14-17):
(показники 14-17):
4.  - передній,
- передній,  - задній, М3,4 -правий, лівий (однакові).
- задній, М3,4 -правий, лівий (однакові).

5. Розрахувати: перекидну силу  (
( ), висоту докладання перекидної сили (Н) і перекидний момент:
), висоту докладання перекидної сили (Н) і перекидний момент:  (показники 18-20).
(показники 18-20).
6. Розрахувати коефіцієнти стійкості  : К1 - К4 (21-24)
: К1 - К4 (21-24)
7. По коефіцієнтах стійкості зробити висновок про умови рівноваги. Визначити напрямок найбільшої ймовірності падіння. Зробити висновок.
Висновок 1: Найменший коефіцієнт стійкості: К2 = 0.10, тому найбільша ймовірності падіння тіла у напрямку – назад.
8. Розрахувати мінімальну перекидну силу (Fпер .), у точці докладання – перший хребець хребта, у напрямку вперед, для виведення тіла з рівноваги дорівнявши коефіцієнти стійкості до 0,9, тоді:
 ;
;  ;
;
Fпер . = Мст.1 / 0,9·Н
Fпер . = 150/0,9·1,25 =133 (Н)
9. Зробити висновок: яку потрібно докласти мінімальну перекидну (силу Fпер .), у точці докладання – перший хребець хребта, у напрямку вперед, для виведення тіла з рівноваги (приблизна відповідь: Fпер .  50 – 130 Н):
50 – 130 Н):
Висновок 2: мінімальна перекидна сила для виведення тіла з рівноваги у напрямку вперед (точка докладання – перший хребець хребта), дорівнює 133 (Н).
БІОКІНЕМАТИЧНИЙ АНАЛІЗ
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 3178; Нарушение авторских прав?; Мы поможем в написании вашей работы!