КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Роботы и роботизированные комплексы для штукатурных работ
|
|
|
|
Штукатурные работы относятся к числу наиболее трудоемких строительных процессов. Несмотря на развитие средств механизации, объем ручных операций на штукатурных работах остается значительным и превышает 60%. Кроме того, выполнения этих работ связано с повышенной влажностью, распылением раствора, вибрацией, что делает этот вид работ мало привлекательным и вредным для здоровья. В связи с этим во многих странах проводятся работы по механизации и автоматизации штукатурных операций, связанных с нанесением штукатурных растворов на поверхность, их разравниванием и затиркой. Одним из перспективных направлений решения этих задач является использования средств робототехники.
Одним из первых применений манипулятора для штукатурных работ является создание в Белоруссии специального многофункционального манипулятора для штукатурных работ (рисунок 4.1). Манипулятор выполнен на трехколесном шасси, на котором смонтированы несущая стойка, привод и блок управления. Вдоль стойки перемещается щит, закрепленный на ползуне, передвигаемом электроприводом. В рабочем положении манипулятор раскрепляется в распор между полом и потолком. При выполнении штукатурных работ у стены монтируют инвентарные маяки, по которым устанавливают плоскость щита манипулятора. Между щитом и стеной образуется полость, куда закачивается раствор. После его схватывания щит отводится от стены и электроприводом поднимается вдоль вертикальной стойки на шаг, равный высоте щита, и вновь прижимается к маякам. После оштукатуривания первой захватки устройство передвигают вдоль стены на ширину щита и процесс повторяется. Манипулятор снабжен цикловой системой управления, которая обеспечивает дистанционное и автоматическое управление в зоне рабочей захватки. Система управления позволяет обеспечить автоматический скользящий режим работы, при котором щит непрерывно перемещается по маякам и непрерывно подается раствор. Несмотря на невысокое качество оштукатуренных поверхностей, испытания показали принципиальную возможность автоматизации штукатурных операций на основе использования достижений робототехники. Они позволили определить основные направления роботизации штукатурных работ.
В первую очередь это относится к технологии разравнивания и затирки штукатурного слоя. Рабочая оснастка на этих операциях должна обеспечивать сложные поступательно-вращательные движения. Японской фирмой «Симидзу кэнцэцу» разрабатывается технология штукатурных работ с помощью роботизированной установки. Она включает ходовой агрегат, который обеспечивает передвижение в пределах перемещения с автоматическим обходом простенков, колонн и препятствий. Использование этой установки на затирке цементной стяжки показало достаточно высокое качество обработанной поверхности и хорошую производительность. Роботизированной установкой было обработано около 10 тыс. м2 поверхностей. С середины 80-х годов прошлого века разработки в области роботизации штукатурных работ ведутся рядом научных центров России: ЦНИИОМТП, ВНИИСтройдормаш, Новочеркасский политехнический институт (ныне Южно-Российский государственный технический университет) и др. Этими организациями проведена большая работа по разработке требований к штукатурным роботам и манипуляторам, технологических схем производства работ и проработке конструктивных решений.
Анализ технологии штукатурных работ, средств их механизации, а также выполненные технические и экспериментальные работы по роботизации процессов нанесения растворов и затирки поверхности позволяет сделать вывод о целесообразности создания для штукатурных работ передвижных РТК.
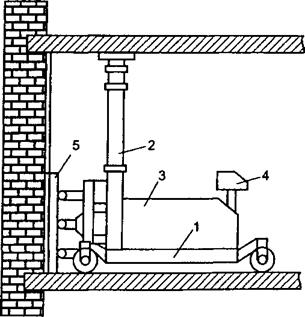
Рисунок 4.1. Манипулятор для штукатурных работ на подвижной
платформе 1 — шасси; 2 — стойка телескопическая; 3 — привод; 4 — пульт управления; 5 — щит
В состав такого комплекса должны входить: установка для приема, перемешивания и транспортировки раствора и известкового молока, растворонасосные установки для подачи материала к рабочему инструменту, автоматические манипуляторы, снабженные рабочими органами для нанесения и разравнивания слоев раствора и затирки поверхности. Такие комплексы позволят выполнять набрызг, уплотнение и разравнивание обрызга, грунтовки и накрывки поверхности. В них должны быть предусмотрены регулировка усилия прижатия уплотняющих и затирочных механизмов, контроль качества поверхности и выверка ее горизонтальности и вертикальности. Комплексы должны иметь дистанционное и программное управление, обеспечивающее выполнение заданной схемы оштукатуривания.
Компоновочная схема автоматического манипулятора для штукатурных работ, входящего в составе роботизированного комплекса, приведена на рисунке 4.2. Такой робот может использоваться при отделочных работах в жилых и общественных зданиях. Он представляет собой мобильную конструкцию на мини — шасси. Основой манипулятора является телескопическая штанга, которая в процессе работы распирается между полом и потолком. Манипулятор, установленный на штанге, имеет два звена и может передвигаться вдоль штанги. Рабочий орган может занимать горизонтальное и вертикальное положения. Это позволяет вести оштукатуривание стен и потолков. Рабочий орган снабжается сменным набором рабочего инструмента. Подача команд и корректировка программы робота осуществляются с местного пульта ПУ или пульта инфракрасного дистанционного управления ПДУ. Эти команды поступают в устройство управления УУ, которое на их основе формирует управляющие воздействия для звеньев манипулятора и рабочего органа РО. Положение звеньев манипулятора контролируется датчиками положения ДП. Для контроля качества поверхности используются устройство контроля УКК и акустические датчики ДА. Мобильные платформы штукатурных роботов могут использовать шагающие, гусеничные, колесные или гибридные механизмы передвижения. Такие роботы позволяют решать задачу комплексной автоматизации штукатурных работ в жилищном и гражданском строительстве 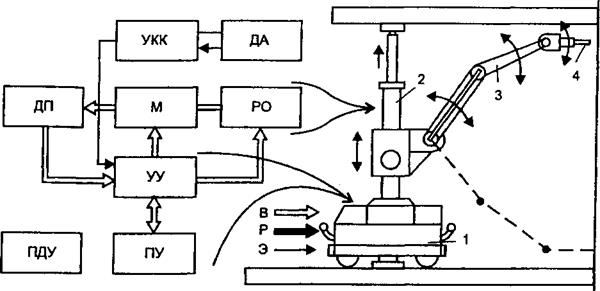
Рисунок 4.2. Строительный робот для штукатурных работ 1 — мини-шасси, 2 — телескопическая штанга, 3 — манипулятор, 4 — рабочий орган, М — манипулятор, РО — рабочий орган с соплом, УУ — устройство управления, ДП — датчики положения, ДА — датчик акустический, УКК — устройство контроля качества поверхности, ПУ — пульт управления, ПДУ — пульт дистанционного управления, В — воздух, Р — раствор, Э — электроэнергия
Роботизированный комплекс, включающий группу рассмотренных роботов, дает возможность вести работы поточно-расчлененным методом (рисунок 4.3). Раствор к манипуляторам подается растворонасосом из бункера-смесителя штукатурной станции, устанавливаемого у подъезда здания. Здесь же размещается установка для приема и перекачки известкового молока. На лестничной площадке размещают растворопровод, к которому подсоединяют рабочие органы манипуляторов. Сжатый воздух подают от компрессорного агрегата, находящегося на лестничных площадках. В качестве рабочих органов манипуляторов, входящих в состав этих комплексов, используются приспособления для механизированного нанесения растворов. Однако для робототехнических систем необходимы форсунки, которые могут работать с растворами любой консистенции, выполнять обрызг, грунтование поверхности и наносить накрывки. При этом они должны снабжаться электромагнитными или электромеханическими вентилями для регулирования подачи воздуха, а также иметь устройства для автоматического регулирования размера факела. Таким образом, форсунка как рабочий орган строительного робота снабжается регулировочными элементами, обеспечивающими в процессе работы автоматическое управление диаграммой распыления и степенью раздробления струи. Размер выходного отверстия сопла выбирают так, чтобы обеспечивалась необходимая скорость раствора на выходе из сопла, создающая надежное сцепление раствора с поверхностью. В связи с тем, что скорость раствора на выходе из сопла определяется скоростью его движения по трубопроводу, в форсунках робототехнических систем должно предусматриваться регулирование размера выходного отверстия. Режим работы рабочего инструмента определяется требуемым расходом материала и подле жит контролю и управлению. Качество нанесения слоя раствора определяется расстоянием между выходным отверстием форсунки и поверхностью, а также зависит от угла наклона сопла. Поэтому при роботизации необходимо предусматривать стабилизацию угла наклона сопла и автоматическое регулирование расстояние его до поверхности.
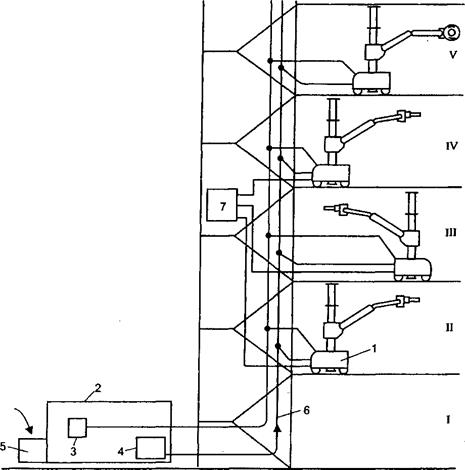
Рисунок 4.3. Роботизированный комплекс для выполнения штукатурных работ 1 — манипулятор; 2 — штукатурная станция; 3 — электрораспределительный щит; 4 — растворонасос; 5 — приемный бункер; 6 — растворопровод; 7 — компресор; I-V — виды операций: подготовка, обрызг, грунтовка, накрывка и затирка
Для разглаживания и затирки лицевого штукатурного слоя манипуляторы снабжают штукатурно-затирочными органами. На первой стадии роботизации могут быть использоваться пневматические и электрические затирочные машинки. При создании специализированных роботов для штукатурных работ нужны специальные рабочие органы, выполняющие затирочные операции, которые должны иметь встроенный привод и комплект съемного затирочного инструмента. Робот, снабженный такими рабочими органами, должен выполнять механизированную затирку накрывочного слоя, затирку цементно-песчаного раствора на поверхности железобетонных панелей, шлифовку прошпаклеванных вертикальных и горизонтальных поверхностей. При создании затирочного инструмента должна предусматриваться автоматическая стабилизация удельного давления затирочного диска на обрабатываемую поверхность и регулирование его величины в зависимости от состава раствора и времени его нанесения, а также регулирование скорости вращения дисков. Затирочная плоскость дисков может иметь увеличенную по сравнению с ручными затирочными машинками площадь. Так как процесс затирки происходит при смачивании поверхности, то к рабочему органу робота предусматривается подвод воды с регулированием ее подачи.
Наряду с рассмотренным вариантом штукатурного инструмента, обеспечивающего набрызг материала соплом со сжатым воздухом, предлагалось использование и других вариантов. Идея одного из них состоит в подачи штукатурного раствора посредством вращающегося валка из погружной ванны и равномерное прижатие его с определенным усилием к стене. Такая технология позволяет достичь строго определенного прижатия раствора к поверхности и совместить операции нанесения раствора с разравниванием штукатурки. Однако при такой технологии остаются переходы в местах сопряжения стен с потолком и полом. Интересным представляется вариант штукатурного инструмента в виде замкнутой камеры с уплотнительными элементами. В этом случае образуется ровная поверхность и сглаживаются все неровности исходной поверхности, при этом за одну операцию выполняется нанесение и разравнивание штукатурки. Однако это не позволяет гибко настраиваться на обработку ниш и выступов. Очень простым по конструкции является штукатурный инструмент с открытой камерой и встроенной затирочной рейкой. Он состоит из простой плиты с несколькими отверстиями для подачи материала и примыкающей к ней по периметру затирочной рейки. Простота конструкции, совмещение операций нанесения материала и его разравнивания одним инструментом. Однако требуются дополнительные исследования оптимальной степени заполнения инструмента, а также выяснения достаточности схватывания штукатурного слоя с поверхностью стены.
При роботизации штукатурных работ одновременно рассматриваются и решаются вопросы автоматизации приготовления и транспортировки раствора. Оборудование передвижных растворных узлов, входящих в состав РТК, снабжается средствами контроля, защиты, автоматического и дистанционного управления. На трубопроводе, подающем растворы, на этажи здания, устанавливают электромагнитные клапаны для управления подачей, а также датчики давления для регулирования режима работы насосных агрегатов. В составе роботизированных штукатурных комплексов включаются автоматизированные штукатурно-смесительные агрегаты с дистанционным управлением. Для подачи растворов в комплекте с манипуляторами используются плунжерные одноступенчатые горизонтальные насосы, входящие в состав штукатурных агрегатов и станций. При выполнении большого объема штукатурных работ наиболее эффективным является использование штукатурной машины, располагаемой на рабочем этаже, в которую компрессором подается сухая штукатурка из силоса размещенного на нулевой отметке здания. Длина подводимого к роботу растворовода для подачи готового штукатурного раствора может составлять 10—15м.
При автоматическом управлении процессом оштукатуривания система управления снабжается группой алгоритмов, выполняющих следующие операции. В состав алгоритмического обеспечения штукатурного робота включаются алгоритмы компенсации ошибок, возникающих вследствие неровности пола, выверки инструмента на заданную толщину слоя, измерения расстояния до стены и поддержания требуемой ориентации инструмента. Кроме того, система управления должна иметь алгоритмы обработки измерительной информации обеспечивающие оценку поверхности стены в рабочей зоне и отслеживающую наличие и габариты имеющихся проемов и границы обрабатываемых поверхностей. Для управления штукатурным роботом используются также алгоритмы, обеспечивающие выполнения инструментом меандрового движения при нанесении раствора на стену и его разравнивании и алгоритмы производящие автоматическую смену рабочей позиции при достижении конца рабочего участка стены.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 1162; Нарушение авторских прав?; Мы поможем в написании вашей работы!