КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Роботизированные комплексы для выполнения монтажных работ
|
|
|
|
В последние годы наблюдается значительное увеличение объема монтажных работ. Монтаж современных зданий и сооружений представляет собой сложный комплексный процесс, включающий целый ряд операций: строповку, транспортировку, прием монтируемых элементов и конструкций на рабочем месте, наведение на принятые ориентиры, установку, временное закрепление, приведение в проектное положение, расстроповку и постоянное их закрепление. Особое внимание при монтажных работах уделяется точности установки конструкций и элементов в проектное положение. Допустимые отклонения монтируемых элементов от проектного положения приведены в таблице 2.1.
Таблица 2. 1.Допустимые отклонения конструкций от проектного положения, мм
| Отклонение осей: | |
| фундаментных блоков относительно разбивочных | ±10 |
| нижних граней стен и перегородок от установочных | ±4 |
| плоскостей стен и перегородок от вертикали | ±5 |
| Отклонение отметок: | |
| верхних опорных поверхностей фундаментов от проектных | ±5 |
| опорных поверхностей стен и перегородок в пределах выверяемого участка | |
| двух смежных нижних поверхностей и перекрытий | |
| верхних поверхностей двух смежных перекрытий |
На монтажных работах в настоящее время используются краны, различного рода монтажные механизмы, универсальная и специальная технологическая оснастка. Внедряются новые методы и формы технологии и организации, начинают использоваться средства автоматизации как основных, так и вспомогательных операций. Однако, несмотря на это, пятая часть рабочих при монтаже зданий и сооружений выполняет большой объем трудоемкой ручной работы. Больших затрат ручного труда требует проведение таких работ как выверка и установка конструкций в проектное положение, их закрепление, герметизация стыков, замоноличивание швов, перестановка оснастки, вспомогательного оборудования и др.
В результате несовершенства применяемого оборудования и оснастки трудоемкость монтажных операций остается очень высокой. Используемые башенные краны выполняют лишь подъемно-транспортные операции. Окончательная выверка монтируемых конструкций в большинстве случаев выполняется вручную. Монтаж одной стеновой панели жилого крупнопанельного дома занимает в среднем до 15 мин. Процесс монтажа строительных конструкций во многих случаях осложняется ограниченностью обзора машинистом крана монтажного горизонта, что снижает эффективность монтажа. Решение задач комплексной механизации и автоматизации монтажных работ сдерживается из-за их сложности. Она обусловлена большими габаритами и массой монтируемых конструкций, их разнотипностью, большими размерами монтажных зон, влиянием ветровых и других климатических факторов. Кроме того, при производстве монтажных работ должно происходить постоянное перемещение монтажных средств по фронту работ.
Повышение эффективности монтажа зданий и сооружений становится важнейшей задачей сегодняшнего дня. В этом направлении во многих странах ведутся исследования и разработки, позволившие получить положительные результаты. Разработаны и внедрены в строительных организациях новые методы монтажа, проведены значительные работы по повышению монтажной технологичности сборных конструкций. На строительных площадках все шире начинают использоваться строительные краны с дистанционным управлением и повышенным уровнем автоматизации. На монтажных работах промышленных объектов находят применение башенные краны с программным управлением. Разработаны и выпускаются новые конструкции строительных кранов с телескопическими стрелами, выносными гидравлическими опорами, перемещающейся вдоль башни стрелой, со стабилизационными платформами и др. Большое внимание уделяется созданию и внедрению автоматических и полуавтоматических грузозахватных устройств и траверс. В последние годы разработаны траверсы, обеспечивающие ориентацию монтируемых элементов в пространстве при гибкой системе подвеса, а также захватные устройства с дистанционной и автоматической расстроповкой. Имеется опыт использования специализированных кондукторов и монтажных машин для установки колонн, стеновых панелей и других строительных конструкций.
Анализ методов и средств выполнения монтажных работ показывает, что успешное решение задач их комплексной механизации и автоматизации связано с разработкой и внедрением методов принудительной установки и ориентирования монтируемых элементов в проектное положение, основанных на достижениях робототехники. Использование строительно-монтажных манипуляторов и роботов совместно с внедрением высокотехнологичных сборных элементов зданий и сооружений позволяет создать автоматизированные монтажные комплексы, исключающие ручной труд при строповке, ориентировании, установке, фиксации и расстроповке монтируемых элементов. Прототипом монтажных РТК следует рассматривать различного вида автоматизированные кондукторы и монтажные машины. Для автоматической выверки колонн многоэтажных промышленных и гражданских зданий разработан ряд кондукторов, многие из которых представляют собой манипуляционные механизмы, снабженные специальными захватами. Попытки автоматизации монтажа жилых зданий привели к разработке кондукторов, обеспечивающих выверку и временное закрепление стеновых панелей. Эти устройства представляют металлоемкую пространственную конструкцию с установленными на ней захватами. Для решения задач роботизации монтажных операций полезным является опыт создания трафаретных кондукторов (см. рисунок 2.1). Их основу составляет кондукторная рама, которая с помощью гидродомкратов перемещается по вертикальным трубчатым стойкам. В раме устроены проемы для панелей и установлены механизмы с гидротолкателями для фиксации и ориентации панелей. Установка на раме монтажного манипулятора с телескопической штангой, оснащенной захватами, перемещающегося вдоль и поперек рамы, позволяет роботизировать процесс монтажа крупнопанельных жилых зданий. Несмотря на громоздкость и высокую металлоемкость, подобного рода конструкций, они служат хорошей базой для поиска новых принципов роботизации монтажных операций.
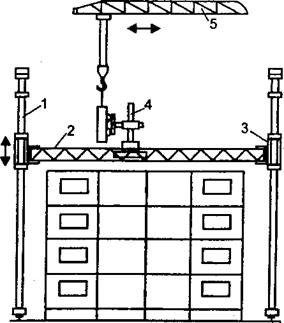
Рисунок 2.1. Трафаретный кондуктор с манипулятором для монтажа
зданий
1 — опорная стойка; 2 — рама кондуктора; 5 — подъемный механизм; 4 — манипулятор; 5 — стрела крана
Другим направлением роботизации монтажных работ является разработка на базе башенных кранов специализированных кранов-манипуляторов. Интересное конструктивное решение имеют краны, снабженные специальными управляемыми грузозахватными траверсами-манипуляторами с пространственной подвеской, которые обеспечивают стабильность положения монтируемых элементов независимо от ветровых нагрузок и высокую точность их монтажа. Такие краны могут иметь программно-дистанционное управление. Все операции могут выполняться автоматически или оператором в режиме дистанционного управления. Пространственная подвеска манипулятора обеспечивает точную посадку панелей в замки, а поворотный манипулятор — подачу деталей в зону монтажа в нужном для установки положении. Оригинальное техническое решение имеет башенный кран новой конструкции, представленный на рисунке 2.2, который позволяет сократить в 1,5 раза продолжительность монтажа крупнопанельных зданий и повысить качество работ. Его отличительной особенностью является наличие манипулятора и поворотно-передаточного устройства. Манипулятор установлен на основной стреле. Кран снабжен вспомогательной неподвижной стрелой (подстрелкой) с перемещающейся по ней кареткой. Поворотно-передаточное устройство выполняет функции магазинного устройства и представляет собой кольцевую рамы с шестью парами кронштейнов для подвешивания к ним специальных траверс с элементами.
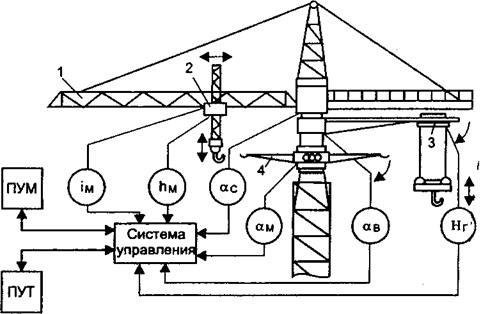
Рисунок 2.2. Монтажный кран с манипулятором 1 — основная стрела; 2 — манипулятор; 3 — вспомогательная стрела; 4 — поворотно-передаточное устройство
Конструкция этого крана позволяет выполнять одновременно операции по подъему одних элементов и установке в проектное положение других. Элементы, поступившие на строительную площадку, разгружают с помощью вспомогательной стрелы и подают ею в магазинное устройство, где их навешивают на кронштейны.
Манипулятор берет из магазинного устройства необходимый для монтажа элемент, транспортирует его вдоль основной стрелы к месту установки, затем ориентирует его в заданное положение и производит установку на место. Управление таким монтажным краном осуществляется с выносных пультов управления, один из которых находится у монтажника, а другой у такелажника. Для обеспечения автоматического или полуавтоматического режима работы на кране устанавливается группа датчиков положения, измеряющих линейные перемещения монтажного манипулятора lМ, hм, угловые перемещения основной и вспомогательной стрелы ас, ав, магазинного устройства ам и положение груза по высоте на крюке вспомогательной стрелы hг. Выходные сигналы датчиков подаются в систему управления краном, которая управляет работой механизмов в соответствии с заложенной программой и поступающими командами с пультов управления ПУМ и ПУТ. Громоздкость конструкции, высокая подвижность крана, невысокая точность монтажа ограничили практическое использование таких кранов.
Перспективным направлением автоматизации монтажных операций следует считать создание автоматических монтажных механизмов с очувствлением. В этом направлении накоплен определенный опыт. В частности были предприняты попытки создания монтажного крана с автоматическим управлением и органами очувствления, которые позволяют устанавливать монтируемый элемент в зависимости от положения ранее установленной конструкции. Однако такая конструкция не нашла практического использования в виду накопления погрешностей монтажа из-за неточности установки предыдущих элементов При монтажных работах находят применение краны-манипуляторы с шарнирно-рычажными телескопическими стрелами (рисунок 2.3). Многозвенное телескопическое оборудование с вращательными парами и набором рабочих самозахватывающих органов дает возможность выполнять целый комплекс монтажных операций. Для роботизации строительно-монтажных работ представляет интерес предложенный метод двухстадийного монтажа элементов. На первой стадии строительные конструкции подаются краном в расширенную зону допусков, а на второй их выверяют путем самоустановки и само- фиксации. При этом требуемая точность подачи элементов не превышает 30 мм. Однако такая схема монтажа требует повышенной точности изготовления монтируемых конструкций.
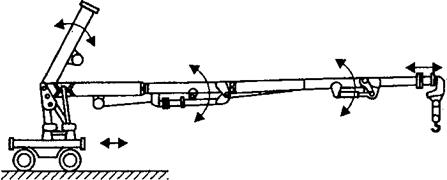
Рисунок 2.3. Кран-манипулятор с шарнирно-телескопической стрелой
Для механизации процесса возведения стен из асбестоцементных экструзионных панелей институтом ЦНИИОМТП предложен мобильный манипулятор, установленный на самоходном шасси (рисунок 2.4). Для обеспечения необходимой устойчивости манипулятора в процессе монтажа его ходовая часть снабжена выносными гидроопорами с дистанционным управлением. Манипулятор снабжен сменными захватами в виде вакуумных присосок и механических зажимов.
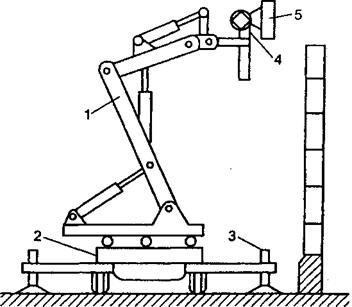
Рисунок 2.4. Схема монтажа стен горизонтальной разрезки из ПАЭ с использованием манипулятора 1 — трехзвенный манипулятор; 2 — самоходное шасси; 3 — гидроопоры; 4 — рабочий орган; 5 — панель
Процесс установки панели включает несколько операций: ориентацию захватного устройства относительно панели, фиксацию панели в захватном устройстве, перемещение ее к месту установки, закрепление панели в проектном положении. Применение манипулятора для монтажа панелей ПАЭ позволяет повысить производительность труда в 1,5 раза, исключить тяжелые ручные операции.
Определенный опыт использования манипуляторов и роботов на строительно-монтажных работах накоплен в зарубежных странах. В Японии, Германии, США и других странах созданы манипуляторы, предназначенные для монтажа навесных элементов, колонн, инженерных коммуникаций. В Японии разработана роботизированная система для подъема и спуска элементов при монтаже высотных строительных объектов Подъемные устройства оснащены гидроприводами, а управление ими осуществляется от микроЭВМ. Использование роботов на монтажных работах позволяет значительно сократить трудозатраты и время выполнения операций. В Германии для транспортировки и монтажа ограждающих конструкций разработан грузоподъемный манипулятор на базе мостового крана с двумя грузовыми тележками. На тросовой подвеске тележек закреплена балка с двумя управляемыми захватами. Манипулятор захватывает ограждающие конструкции за монтажные петли. Все операции выполняются в полуавтоматическом режиме.
При монтаже тяжелых и крупногабаритных элементов целесообразно применять роботы, работающие совместно с краном (рисунок 2.5). При этом монтажный робот должен иметь согласованное с краном управление, которое выполняется одним оператором с портативного пульта. При этом для обмена информацией между системой управления и пультом оператора может использоваться инфракрасный или радиоканал связи. Аппаратура управления роботом и станция управления краном объединяются модулем синхронизации, обеспечивающим прием команд управления и синхронизацию работы оборудования при их исполнении.
Анализ достижения в области технологии, механизации и автоматизации строительно-монтажных работ и прогнозов развития строительной робототехники позволяет определить наиболее перспективные для роботизации виды строительно-монтажных работ и операций. К ним следует отнести монтаж перегородок из различных материалов, монтаж каркасов зданий, укладку лестничных маршей и перекрытий, разборку конструкций зданий при реконструкции, монтаж и демонтаж строительных лесов, монтаж инженерного оборудования зданий и сооружений.
Для монтажа перегородок внутри здания из блочных и листовых материалов экономически оправдано применение передвижных манипуляторов с дистанционным и интерактивным управлением. В качестве основания таких манипуляторов целесообразно использовать мини-шасси на пневмоколесном и гусеничном ходу или применять платформы на воздушной пленке.
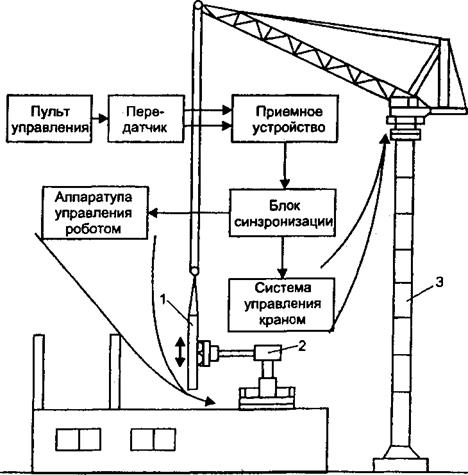
Рисунок 2.5. Установка железобетонных колонн с помощью робота 1 — колонна; 2 — робот; 3 — башенный кран
Перспективным направлением является решение задач автоматизации монтажа крупнопанельных зданий на основе создания роботизированных монтажных комплексов с программным и адаптивным управлением. На рисунке 2.6 приведена схема роботизированного комплекса для монтажа панелей наружных и внутренних стен и перекрытий жилых зданий. В состав комплекса входит башенный кран, специализированный монтажный робот и растворная станция. Такой комплекс обеспечит автоматизацию всех основных операций: подъем и подачу панелей к месту монтажа, устройство растворной постели, выверку и установку панелей, герметизацию швов. При разработке таких комплексов одновременно должны совершенствоваться способы фиксации панелей, а также конструкция и технология герметизации швов.
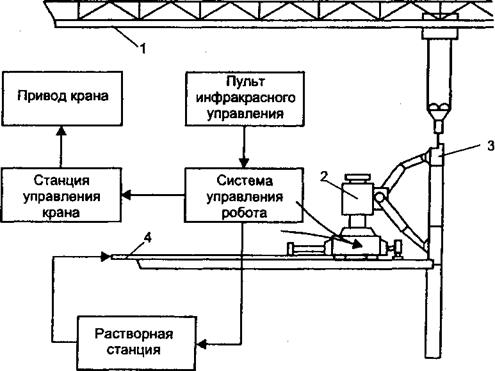
Рисунок 2.6. Роботизированный комплекс для монтажа зданий 1 — стрела башенного крана; 2 — монтажный робот; 3 — стеновая панель; 4 — растворопровод
Монтажный робот размещается на подвижной платформе с выдвижными опорными консолями. Один из манипуляторов комплекса служит для ориентации и установки монтируемых конструкций, второй обеспечивает подготовку поверхности и герметизацию швов. Управление работой всех механизмов комплекса, в том числе и башенного крана, осуществляется с пульта дистанционного управления и от микроЭВМ системы управления робота.
Рядом российских исследовательских центров (МГСУ, ВНИ- ИСтройдормаш, ЦНИИОМТП) ведутся работы по разработке кранов-манипуляторов с различными типами связей для монтажа строительных элементов зданий. В зависимости от конкретного назначения в них использованы жесткие, гибкие и комбинированные связи. Некоторые конструкции, с целью обеспечения необходимой точности позиционирования, снабжены устройством для временного опирания ориентирующего органа на перекрытия рабочего горизонта. Особенностью этих конструкций является использование специальных грузозахватных приспособлений с несколькими степенями подвижности, обеспечивающих точную ориентацию монтируемых элементов (рисунок 2.7). Эти устройства обеспечивают корректировку угловых положений монтируемой конструкции в двух плоскостях, разворот относительно вертикальной оси и ее вертикальную посадку. Из предложенных схем кранов-манипуляторов выделим наиболее перспективный вариант, который представлен на рисунке 2.8.
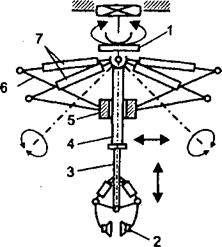
Рисунок 2.7. Грузозахватное ориентирующее устройство 1 — ориентирующий орган; 2 — схват; 3 — шток; 4 — силовой цилиндр; 5 — ползун; 6 — тяги; 7 — гидроцилиндры
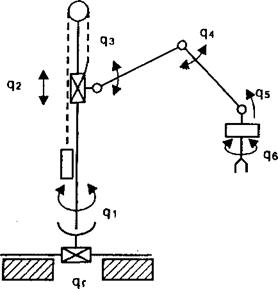
Рисунок 2.8. Перспективный вариант крана-манипулятора для монтажных работ
Такая схема, благодаря жестким связям между звеньями, имеет меньшую погрешность позиционирования. Тросовая подвеска противовеса не влияет на точность манипулятора, а его использование позволяет снизить мощность привода. Кроме того, данная схема с вращательными кинематическими парами обладает большей маневренностью и может использоваться для монтажа различных строительных конструкций. Приведенный кран-манипулятор имеет шесть региональных степеней подвижности, отвечающие непосредственно за доставку монтируемого элемента в зону монтажа и установку в проектное положение и одну глобальную. Глобальная степень подвижности представляет собой рельсовый ход. Эта степень подвижности участвует только при межоперационных перемещениях, например при смене места монтажа. Для нее задаются несколько точек позиционирования, в которых будет находиться манипулятор во время монтажа. Обычно этих точек столько же, сколько захваток в строящемся здании. Пятая и шестая степени подвижности отвечают за локальную установку панели в зоне монтажа. Пятая степень подвижности обеспечивает совмещение вертикальной ось панели с вертикалью в плоскости панели, а шестая служит для совмещение горизонтальной оси панели с горизонтальной осью. Требуется еще выставить вертикальную ось панели в плоскости перпендикулярной плоскости панели и выставить горизонтальную ось панели в плоскости панели. Но при точном изготовлении панели, она сама принимает желаемое положение под действием собственного веса.
Для построения монтажных РТК представляют интерес краны-манипуляторы с ориентирующим устройством, связанным со стрелой пространственной канатной подвеской. Применение пространственной канатной подвески позволяет избавиться от крутильных колебаний, возникающих в обычной системе (рисунок 2.9). Пространственная подвеска с канатами, натянутыми силой веса подвешенных масс, воспринимает полную пространственную систему нагрузок как жесткая связь. Несмотря на несовершенство, сложность и громоздкость предлагаемых устройств, отдельные их решения безусловно заслуживают внимания и могут быть использованы при разработки современных монтажных роботов и РТК с адаптивным управлением.
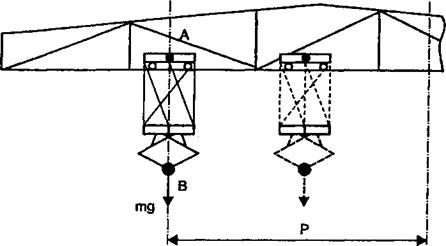
Рисунок 2.9. Ориентирующее устройство с пространственной подвеской
В ходе выполнения монтажных операций требуется задание разбивочных осей и постоянный контроль положения строительных элементов и конструкций. Одним из наиболее перспективных методов задания в пространстве базовых осей при выполнении монтажных работ является использование коллимированного лазерного луча. Применение лазерных приборов позволяет не только обеспечить непрерывный визуальный контроль при установке строительных конструкций, но и автоматизировать их ориентирование. Лазерные прибор и системы контроля могут эффективно использоваться при монтаже ленточных фундаментов, стеновых панелей, перегородок, подвесных потолков, колонн, подкрановых путей. Основу этих приборов и систем составляет лазер, излучающий монохроматический, узконаправленный световой луч. Для автоматического контроля используются специальные фотоприемные измерительные устройства, позволяющие определять направление и величину отклонения монтируемых элементов от проектной оси, задаваемой лазерным лучом.
Принцип действия автоматических устройств для измерения отклонений строительных конструкций относительно лазерного луча представлен на рисунке 2.10. Фотоприемное устройство, закрепленное на монтируемом элементе, состоит из оптической матрицы с фотодиодами. Матрица составлена из собирающих линз, которые разделяют световой поток на соответствующие фотодиоды. Последние преобразуют световой поток в электрические сигналы, которые попарно сравниваются относительно вертикальной и горизонтальной осей.
Перспективным направлением автоматизации процесса контроля выполнения монтажных операций является использование матричных фотодиодных панелей, которые в сочетании с микроэлектронными устройствами обработки информации позволяют с высокой точностью регистрировать положение строительных конструкции и выдавать управляющие сигналы исполнительным механизмам.
При монтаже фундаментов, установке колонн и панелей лазерными приборами задаются разбивочные оси основных конструктивных частей здания.
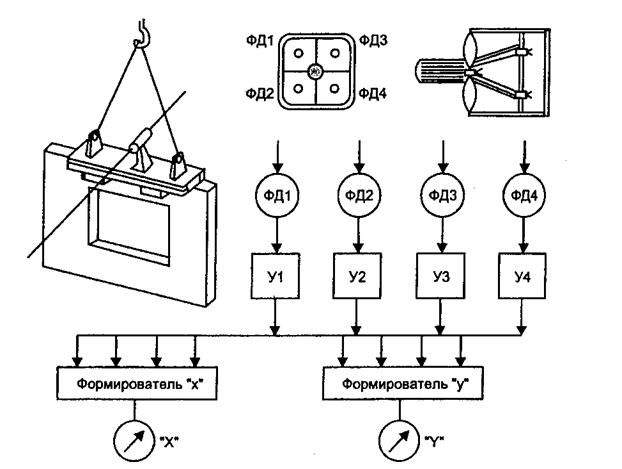
Рисунок 2.10. Фотоэлектрическое устройство контроля положения монтируемых строительных конструкций
Используя отклоняющие устройства, эти оси в процессе работы переносятся на монтажные горизонты. Монтажные краны в этом случае снабжаются специальными траверсами с жестким захватом строительных конструкций. На траверсы устанавливаются фотоприемные устройства, регистрирующие положение монтируемых элементов относительно проектных осей, задаваемых лазерным лучом. При автоматизации установки панелей в проектное положение сигналы с фотодетекторов, пропорциональные величине отклонения, передаются в систему управления монтажным оборудованием.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 1776; Нарушение авторских прав?; Мы поможем в написании вашей работы!