КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Роботизация земляных и свайных работ
|
|
|
|
В строительстве для выполнения большой группы земляных работ, таких как возведение насыпи, рытье котлованов и выемок, профилирование земляного полотна, планировка площадок и др., применяют многоцелевые землеройно-транспортные машины. Среди них выделяются одноковшовые экскаваторы, которые по кинематической структуре представляют манипулятор, снабженный прямой или обратной лопатой. Эти машины могут составить основу для разработки роботизированной технологии производства земляных работ на строительных площадках. На их базе возможно применение эффективных механизмов с автоматизированным и автоматическим управлением для отрывки котлованов и траншей под фундаменты, зачистки неровностей в малообъемных выемках, подготовки траншей для укладки инженерных коммуникаций и других работ.
Создание на базе экскаваторов землеройных роботов связано с автоматизацией режимов работы и управления перемещением рабочего органа, обеспечением требуемого качества обрабатываемой поверхности и защитой машин при возникновении аварийных моментов во время эксплуатации. При автоматизации режимов копания обеспечивается полное использование мощности двигателя и наибольшая производительность. В основу построения САР режимов копания положен принцип стабилизации нагрузки приводного двигателя от сил сопротивления резанию путем изменения толщины срезаемого слоя. Регулируемым параметром в этих системах является нагрузка на двигатель, а регулирующим — положение рабочего органа. Величина нагрузки контролируется косвенными методами путем измерения крутящего момента, тягового усилия, угловой скорости вала двигателя или степени буксования ведущих колес. Создание на базе экскаваторов землеройных роботов связано с решением проблемы перевода отдельных операций цикла на программное управление и решением задачи планирования движений рабочего органа. В настоящее время задачи программного управления решаются на базе использования бортовой управляющей микроЭВМ. При этом необходимо оснастить машину информационно-измерительной системой контроля основных параметров состояния. На первых этапах создания землеройных роботов следует использовать интерактивное и супервизорное управление. Процесс обучения выполняется в ручном режиме, в ходе которого запоминается последовательность и основные показатели выполнения отдельных операция. Затем эти действия могут многократно повторяться в автоматическом режиме.
Создание на базе экскаваторов землеройных роботов в первую очередь связано с разработкой более совершенных рукоятий-манипуляторов. Значительно больший эффект достигается в сочетании с телескопической рукоятью экскаватора (рисунке 6.1).
|
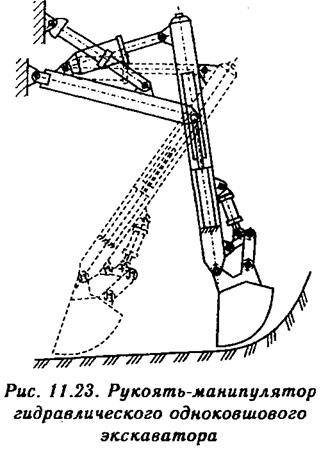
Ее применение обеспечивает прямолинейное движение рабочего органа. В результате решается проблема устранения волнообразного профиля основания (дна) котлованов и траншей.
Для решение проблемы отрывки выемок вблизи стен, фундаментов, а также с наклонной осью в вертикальной плоскости, перпендикулярной оси движения машины и различной конфигурации в плане, разработан манипулятор с цепным рабочим органом (рисунок 6.2).
Работа землеройной машины заключается в следующем. При отрывке линейно-протяженных выемок и траншей, землеройная машина работает, как существующие экскаваторы с цепным рабочим органом. Для отрывки круглых в плане выемок с помощью гидропривода приводится во вращение стол и цепной рабочий орган. Одновременно с этим рабочий орган перемещается относительно
 |
стрелы вниз. В результате этого отрывается выемка цилиндрической формы. Аналогично с помощью этого манипулятора осуществляется отрывка выемок овальной в плане и другой формы.
|
Фотоприемное устройство состоит из трех световодов, расположенных один над другим и разделенных между собой экранами. Каждый световод оканчивается фотодиодом ФД, подключенным на вход усилителя.
Световоды имеют возможность принимать сигнал (луч) из любой точки горизонта в диапазоне 360°. Световоды вырабатывают сигнал отклонения координаты рабочего органа машины от заданной, который после усиления подается на управление положением рабочего органа машины. Веерный луч или плоскость могут быть расположены горизонтально или под заданным углом к горизонту. Бортовое оборудование включает фотоприемное устройство (фотодетектор) и устройство обработки данных. Фотодетектор имеет круговой обзор и устанавливается на штанге.. Точность управления относительно опорной лазерной плоскости зависит от стабильности направления лазерного луча и точности регистрации положения фотоприемника относительно луча. При автоматическом управлении положением рабочих органов выходной сигнал фотоприемного устройства подается в управляющую микроЭВМ.
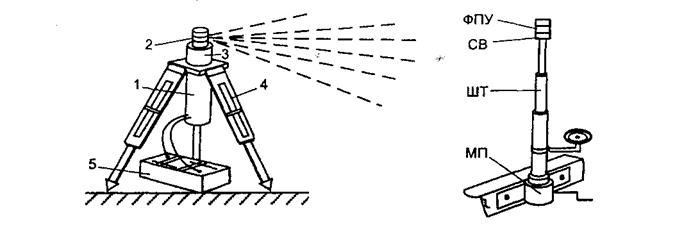
Рисунок 6.3. Лазерная система задания осей и плоскостей ЛИ — лазерный излучатель; ФПУ — фотоприемное устройство;
1 — лазер; 2 — вращающаяся призма; 3 — привод; 4 — штатив; 5 — аккумулятор СВ — световоды; ШТ — штанга телескопическая; МП — механизм подъема
Еще одно перспективное направление использование промышленных роботов связано с выполнением свайных работ. Применения роботов и создания на основе сваебойных агрегатов РТК, оснащенных лазерными системами контроля, позволяет автоматизировать процесс забивки свай, их подрезки. В состав комплекса включается сваебойная установка, робот для подачи свай и их подрезки со сменным рабочим органом. На рисунке 6.4 приведен пример такого комплекса, оснащенного лазерной системой контроля. Аппаратура контроля состоит из лазерного излучателя ЛИ, фотодатчика ФД и панели контроля ПК. Для задания проектной оси забивки свай вдоль нее направляется лазерный луч. На мачте 1 сваебойной установки монтируется фотодатчик, фиксирующий положение луча в горизонтальной плоскости. Установка мачт выполняется в створе луча. При забивке свай до заданной отметки фотодатчик размещается на наголовнике и фиксирует положение луча в вертикальной плоскости. Если лазерный луч используется только для задания горизонтального уровня погружения свай, то в этом случае его удобно разворачивать в плоскость, располагая лазерный прибор за пределами рабочей площадки. Контроль срезки свай под проектную отметку также целесообразно проводить при помощи лазерного прибора, задающего горизонтальную плоскость. Относительно этой плоскости и выполняется контроль за положением рабочего органа 3 установки. Фотодатчик ФД размещается на рабочем органе. Информация с фотодатчика поступает в систему управления комплексом и используется для установки свай и рабочего инструмента в заданное положение. 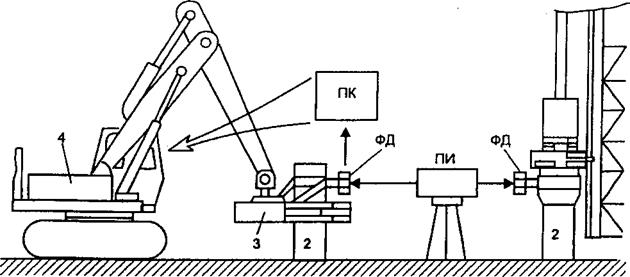
Рисунок 6.4. Роботизированный комплекс для свайных работ 1 — сваебойная установка; 2 — свая; 3 — рабочий орган; 4 — робот для подачи, установки и подрезки свай; 5 — лазерная система контроля
С помощью лазерного луча задаются разбивочные оси и высотные отметки при забивке и подрезке свай. Кроме того, лазерный луч, развернутый в вертикальную плоскость, позволяет контролировать вертикальность погружения свай и положение направляющей-мачты копра. При сооружении свайных фундаментов лазерное визирование в сочетании с линейными измерениями в направлении разбивочных осей позволяет автоматизировать процесс установки свай в заданное место и их погружения до заданной отметки. Использование лазерной системы в составе РТК позволяет автоматизировать процесс разбивки свайного поля, передвижение оборудования и его ориентирование в новой точке по створу разбивочных осей. Автоматизация процесса погружения свай на основе роботов и лазерных систем позволяет значительно улучшить качество возведения фундаментов, повысить производительность труда и сократить сроки выполнения работ.
Заключение
Дальнейшее развитие строительных технологических процессов во многом связано с широким внедрением и применением средств и систем автоматизации и робототехники на строительной площадке. Это становится возможным по мере совершенствования строительной техники, обусловленного использованием новейших достижений в области электроники. Интеллектуализация строительных машин направлена на повышение точности выполнения рабочих операций, улучшение управляемости, повышение рентабельности и безопасности, снижению доли трудоемких процессов. Наблюдается заметный прогресс в области совершенствования датчиков и устройств обработки информации, в первую очередь микропроцессоров и микро-ЭВМ, так что стала возможной автоматизация различных видов работ.
Известные зарубежные фирмы, выпускающие строительную технику, все чаще оснащают свои машины различными автоматическими контрольными устройствами, позволяющими предотвращать повреждения двигателя, коробки передач и гидравлики, устранение которых обходится дорого и требует больших затрат времени. Кроме того, мощность машины используется более эффективно и тем самым снижается расход топлива. Работы, целесообразность проведения которых у многих вызывала сомнения, привели к созданию эффективных и надежных электронных систем, устройств, объединяемых бортовыми микро-ЭВМ.
Любая система, использующая микропроцессор, может отображать состояние самой машины или же окружающей ее среды на мониторе. В основном мониторы представляют собой системы индикации на электронной или цифровой панели, на которой состояние машины представляется в виде различных величин символов и знаков. Существуют мониторы, отображающие состояние машины на дисплее с жидкими кристаллами и при необходимости делающие сообщения с помощью синтезатора речи. Например, разработан электронный ограничитель грузового момента, который предупреждает оператора об опасности при превышении допустимых предельных величин у самоходных кранов. Другое электронное устройство может автоматически подсчитывать выработку экскаватора [1]. При помощи мониторов удобно контролировать положение машин (траншеекопателя, проходческого щита и т. д.), состояние объектов и передавать информацию о них в виде видеосигналов.
Автоматизация позволяет неопытному водителю управлять сложной машиной. Дальнейшее развитие автоматизации идет по пути создания машин, работающих в оптимальном режиме и приспосабливающихся к рельефу местности и погодным условиям, как это делает опытный оператор, и чтобы режимы эксплуатации не ограничивались бы одной моделью управления. Машиной с полной автоматизацией может считаться такая, которая при нажатии кнопки пуска оператором выполняла бы операции по решениям, принятым ею самой, и работала бы по заданной программе.Однако, строительных машин, в управлении которых не принимал бы участия человек, пока нет. В числе машин с самообучающейся системой считывания, подобных множеству промышленных роботов, когда они вводятся для заданного перемещения и повторения этого перемещения, на практике применяются такие устройства, как буровая каретка, роботы для нанесения штукаткурных защитных покрытий, отделки полов и другие. Для подачи команд перемещения вначале использовался способ, при котором оператор задавал воздействия с помощью обычного переключения рычагов. В связи с большими размерами машин и сложными командами, для ввода которых требовалось много времени, в последнее время получила распространение система ввода данных в виде числовых значений по осям координат. Данные вводятся с помощью моделирования работы машины по графам, отображенным на дисплее специальной персональной ЭВМ (система с числовым программным управлением).
Список использованной литературы
1) Булгаков А. Г., Гернер И., Каден Р. Исследования и практические примеры организации производства и использования роботов в стройиндустрии // Машины, механизмы, оборудование и инструмент — М.: ВНИИНТПИ, 2008, вып. 1. — 48 с.
2) Загороднюк В. Т., Паршин Д. Я. Строительная робототехника. — М.: Стройиздат, 2006. — 269 с.
3) Зенкевич С. Л., Ющенко А. С. Управление роботами. Основы управления манипуляционными роботами. - М.: Изд-во МГТУ им. Н. Э. Баумана, 2009. — 400 с.
4) Красников В. Ф. Промышленные роботы и манипуляторы: Учеб. пособие / РИСХМ. — Ростов н/Д, 2004. — 110 с.
5) Паршин Д. Я., Булгаков А. Г. Автоматизация и роботизация строительно-монтажных работ: Учеб. пособие / НПИ. — Новочеркасск, 2008. — 288 с.
6) Спыну Г. А. Промышленные роботы: Конструирование и применение. — Киев: Вища шк., 2005. — 176 с.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 1284; Нарушение авторских прав?; Мы поможем в написании вашей работы!