КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Малярные роботы и роботизированные комплексы
|
|
|
|
Малярные работы являются завершающей стадией всего технологического процесса строительства и по трудозатратам составляют около 16’%, а сметная стоимость достигает 8—10%. Перед нанесением окрасочных составов проводится большой объем подготовительных операций. После окрашивания может выполняться декоративная обработка поверхности, нанесение рисунков и фактурного слоя. Кардинальный путь изменения вредных условий труда отделочников, повышения производительности и качества работ связан с комплексной механизацией и автоматизацией этого вида работ при широком использовании средств робототехники. Основным направлением роботизации малярных работ является применение роботов с программным и адаптивным управлением, которые должны заменить человека на операциях, связанных с подготовкой поверхностей, нанесением шпаклевочных, грунтовочных и окрасочных составов.
Анализ технологических операций подготовки и окрашивания поверхностей стен и потолков показывает, что с помощью манипуляторов с дистанционным или программным управлением можно очистить поверхность от пыли сжатым воздухом, снять старые покрытия, произвести сплошное шпаклевание, нанести фунтовые, лакокрасочные, теплозащитные, клеевые и водоэмульсионные покрытия. Роботы, выполняющие операции, связанные с применением взрыво- и пожароопасных веществ, должны иметь взрывобезопасное исполнение. Предпринимались многочисленные попытки использования для нанесения окрасочных покрытий на поверхности стен и потолков промышленных роботов, используемых в автомобильной, машиностроительной и других отраслях. Однако уело- вия стройплощадки требуют создания специальных конструкций манипуляторов и построения на их основе РТК для малярных работ. Работы в этом направлении ведутся во многих странах.
Одной из первых отечественных разработок является покра- сочно-малярный манипулятор для нанесения меловых и водоэмульсионных растворов на плоские поверхности, приведенный на рисунок 5.1. Несмотря на неудачные эксперименты с этими манипуляторами, заложенный в них ряд структурных и конструктивных решений заслуживает внимания при дальнейших разработках средств роботизации для малярных работ. Манипулятор М0-01 выполнен на базе малогабаритной машины с двухзвенной стрелой и представляет собой две качающиеся телескопические штанги с выдвижными штоками, движущиеся в противоположные стороны. Штанги приводятся в движение одним приводом. На концах штанг установлены покрасочные форсунки. При движении штанг форсунки перемещаются по прямой линии вдоль обрабатываемой поверхности. Манипулятор с помощью стрелы поднимается на заданную высоту и посредством вертикальных перемещений форсунок и горизонтального движения машины окрашивает поверхность стены. Данная конструкция может использоваться и при окрашивании потолка, при этом стрела манипулятора поднимается на необходимую высоту и манипулятор разворачивается на 90°. Манипулятор М0-01 рассчитан на производительность 500 м2/ч. Дистанционное управление манипулятором позволяет вывести оператора из зоны распыления окрасочных материалов. Другой вариант покрасочного манипулятора М0-03 имеет две двухзвенных шарнирно связанных руки, на концах которых установлены покрасочные форсунки. Данная конструкция имеет более простое исполнение механической части и отличается меньшим габаритом при складывании звеньев. Шарнирные штанги перемещаются в противоположных направлениях и обеспечивают движение форсунок параллельно обрабатываемой поверхности и плавное изменение ширины полосы захвата. Наибольший вылет звеньев 2 м. Обе конструкции отличаются оригинальным кинематическим решением, позволившим снизить динамические нагрузки, осуществить все движения от одного привода, обеспечить постоянную скорость движения форсунок и простоту управление манипулятором.
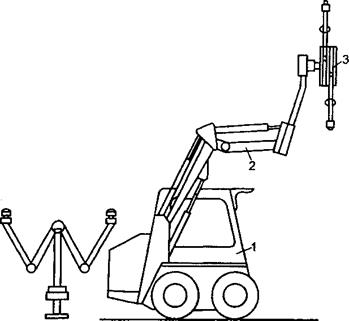
Рисунок 5.1. Покрасочно-малярный манипулятор М0-01 с качающимися штангами 1 — машина ТО-31; 2 — двухзвенная стрела; 3 — телескопические штанги с форсунками
Рассмотрим еще одну конструкцию отечественного манипулятора, выполненную на базе многофункционального экскаватора МО-3341 и предназначенную для окраски наружных стен зданий (рисунок 5.2).
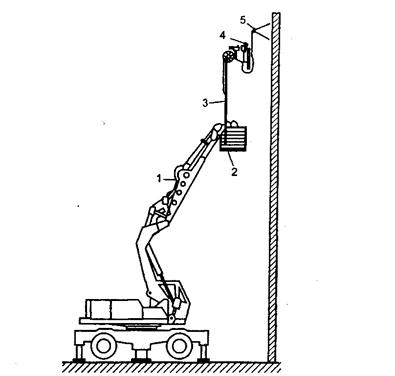
Рисунок 5.2. Многофункциональный манипулятор со сменным окрасочным оборудованием 1 — манипулятор; 2 — подвесная люлька; 3 — двухкоординатный механизм; 4,5 — форсунка
Многофункциональный манипулятор снабжен подвесной люлькой, в которой установлено сменное окрасочное оборудование. Оно снабжено вертикальной штангой с двухкоординатным механизмом для перемещения форсунки. Форсунка перемещается горизонтально и вертикально вдоль стены, выполняя сканирование окрашиваемой поверхности. Для управления окрасочным оборудованием использовано релейно-контактное устройство и герконовые датчики положения. Использование многофункциональных манипуляторов со сменным окрасочным оборудованием подтвердило экономическую целесообразность роботизация малярных работ в строительных организациях.
Из зарубежных разработок наибольшего внимания заслуживают окрасочные роботы с программным и адаптивным управлением, созданные в Японии. На рисунке 5.3 показана компоновочная схема одного из первых таких роботов, предназначенного для нанесения окрасочных покрытий на вертикальные поверхности. На колонне установлен двухзвенный манипулятор с ориентирующим органом, обеспечивающим перпендикулярность форсунки относительно окрашиваемой поверхности в ходе перемещения звеньев манипулятора и его поворота вокруг колонны. Управление манипулятором осуществлялось от микроЭВМ. При перемещении форсунки в процессе работы система управления обеспечивала поддержание постоянного расстояния до стены. В дальнейшем японскими специалистами были разработаны самоходные роботы для окраски помещений, наружных поверхностей балконов и лоджий высотных зданий и ряд др. Испытания этих разработок показало хорошее качество поверхности, которое не уступает уровню квалифицированного рабочего.
Робот включает механизм перемещения и станцию управления, оборудование для подачи окрасочных составов и автоматический пульверизатор. Устройство перемещения рабочего органа имеет горизонтальные и вертикальные штанги и привод. Аналогичные разработки выполнены в ряде других стран: Германии, Болгарии, США, Польше. Выполненные разработки показали перспективность роботизации малярных работ. Применение роботов позволяет снизить трудоемкость, увеличить производительность работы и повысить технику безопасности при выполнении окрасочных работ.
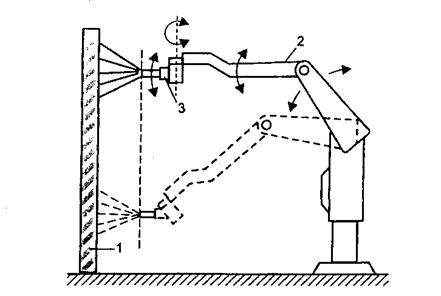
Рисунок 5.3. Компоновочная схема окрасочного робота 1 — колонна; 2 — двухпозиционный манипулятор;3— ориентирующий орган с форсункой
Перспективными являются манипуляторы для малярных работ при отделке жилых домов. Анализ выполненных разработок и технологии нанесения окрасочных составов показывает, что для роботизации этих процессов целесообразно создать универсальный манипулятор для подготовки поверхностей и их окраски. При этом необходимо использовать блочно-модульную конструкцию. На рисунок 5.4 показана компоновка отделочного робота для выполнения отделочных работ в жилых помещениях, предложенная Паршиным Д. Я. в 1990 г. Он состоит из базового блока, на котором установлено два двухзвенных манипулятора. Базовый блок снабжен колесным движителем для перемещения робота из одного помещения в другое. В рабочем состоянии робот с помощью телескопической опорной штанги раскрепляется между полом и потолком помещения. Базовый блок с манипулятором может перемещаться вдоль штанги. После окончания работ штанга складывается и робот опускается на колеса. Звенья манипулятора в процессе передвижения робота также складываются. Робот работает в цилиндрической системе координат и снабжается бортовкой микро ЭВМ, обеспечивающей программное или адаптивное управление. При адаптивном управлении робот снабжается ультразвуковым сканером. Кроме того, такой робот должен иметь дистанционное управление, для которого лучше использовать радиоканал связи. Снабжение робота комплектом сменного инструмента позволит автоматизировать основные процессы отделки жилых помещений.
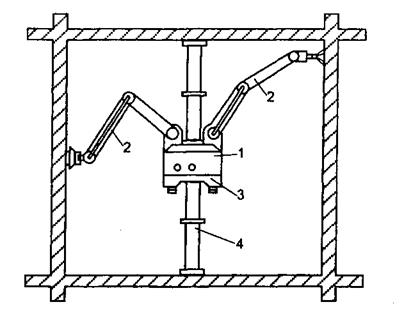
Рисунок 5.4. Двурукий робот для отделочных работ в жилых
помещениях
1 — базовый блок; 2 — манипуляторы; 3 — колесный движитель; 3— колонна
На базе малярных роботов целесообразно создавать РТК, в состав которых кроме манипуляторов должны включаться шпаклевочные и малярные агрегаты. Управление оборудованием осуществляется системой управления комплекса, построенной на микроЭВМ. Шпаклевка наносится специальными шпателями с автоматической подачей материала или с помощью форсунок с воздушным распылением. Для нанесения окрасочных составов следует использовать специальные форсунки с электромагнитными клапанами. Можно также рекомендовать пневматические валики с внутренней подачей краски через отверстия. Управление подачей окрасочных составов на валики осуществляется с помощью электромагнитных клапанов, устанавливаемых на подающих шлангах.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 1587; Нарушение авторских прав?; Мы поможем в написании вашей работы!