КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Роботизация производства бетонных работ
|
|
|
|
Современное строительство характеризуется большими объемами выполнения бетонных работ. Объемы использования монолитного бетона и железобетона составляют свыше 130 млн. м3 и продолжают увеличиваться. Около 80'% объема монолитного бетона используются в промышленном строительстве в первую очередь для возведения конструкции подземных частей зданий и сооружений и фундаментов под технологическое оборудование. Монолитный бетон и железобетон широко применяют для возведения дымовых труб, градирен, силосов, тяжелых колонн, различных резервуаров, энергетических объектов, подпорных стенок, сложных арочных и сводчатых покрытий. Монолитный бетон и железобетон используется для устройства полов, подъездных дорог. Возрастает интерес к монолитным бетонным и железобетонным конструкциям в гражданском строительстве. Монолитные конструкции применяют для строительства высотных зданий общественного назначения и жилых многоэтажных домов. Из монолитного железобетона возводят здания повышенной этажности, характеризующиеся сложными, выразительными по форме планами и сочетаниями объемов. Эффективен монолитный бетон при строительстве в районах с повышенной сейсмичностью.
Главным направлением повышения эффективности бетонных работ является индустриализация заготовительных процессов, широкомасштабное внедрение комплексной механизации и автоматизации на основе использования достижений робототехники и микропроцессорной техники.
Возведение конструкций из монолитного бетона и железобетона включает комплекс работ, который состоит из заготовительных, транспортных и монтажно-укладочных операций. Направления развития технологии бетонных работ предусматривают первоочередное решение задач комплексной механизации подачи, распределения и укладки бетонной смеси. На строительных площадках требуются машины и оборудование, которые бы выполняли непрерывную подачу и укладку бетонной смеси в конструкции и обеспечивали бы заданный темп бетонирования. Причем места укладки бетона могут располагаться как ниже нулевой отметки, так и на значительной высоте от нее. Они могут иметь значительные габариты и объемы. Сократить трудоемкость подачи и укладки бетонной смеси, устранить тяжелый ручной труд и повысить производительность труда позволяет использование бетононасосов, трубопроводного транспорта, специальных бетоноукладчиков, бетоноукладочных стрел-манипуляторов и роботов. Особенно они эффективны при бетонировании больших площадей и возведении монолитных железобетонных зданий. Шарнирно-распределительные стрелы представляют собой манипуляторы с бетонопроводами, имеющие ручное, дистанционное или программное управление. Они монтируются на автобетононасосах, поворотных платформах, временных и стационарных опорах, башенных кранах.
Наибольшее применение на строительных площадках находит автобетононасос с шарнирно-распределительной стрелой. На рисунок 3.1 показан автобетононасос, оборудованный стрелой-манипулятором с гидравлическим управлением. Стрела автобетононасоса состоит из шарнирно-сочленяемых секций, по которым проходит бетонопровод, оканчивающийся гибким рукавом. Стрела-манипулятор имеет от 3 до 5 секций.Такой манипулятор позволяет с одной стоянки машины подавать бетонную смесь на высоту до 22 м в любую точку бетонируемой конструкции в радиусе до 20 м.

Рисунок 3.1. Автобетононасос с шарнирно-распределенной стрелой
Управление положением стрелы ведется машинистом с пульта, расположенного на машине. Некоторые автобетононасосы с шарнирно-распределенной стрелой оснащены системой радиоуправления, позволяющее оператору управлять перемещением стрелы с места укладки бетона. Перевод манипулятора из рабочего в транспортное положение занимает 20—30 мин. Это дает возможность рационально использовать установку на многих объектах. Практика применения автобетононасосов со стрелами-манипуляторами показала их высокую эффективность. Внедрение этого оборудования на объектах с рассредоточенными объемами бетонных работ позволяет устранить трудоемкие операции по укладке бетонной смеси, избавить рабочих от больших затрат физического труда, грязной и вредной работы.
Высокие экономические показатели дает использование стрел-манипуляторов при возведении высотных монолитных зданий и сооружений с помощью переставных и скользящих опалубок. В этом случае на рабочем полу опалубки устанавливается опорная башня с поворотной платформой, на которой монтируется стрела-манипулятор с бетонопроводом (рисунок 3.2).Бетонопровод стрелы через вертикальный трубопровод соединяется с автобетононасосом, располагаемым у основания сооружения.
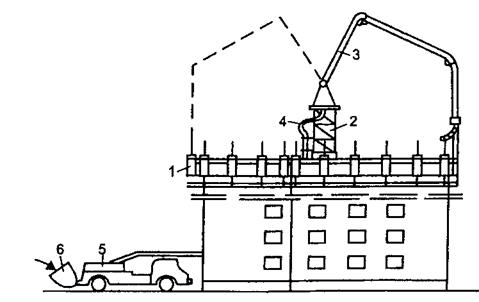
Рисунок 3.2. Подача бетонной смеси манипулятором при возведении монолитных зданий 1 — скользящая опалубка; 2 — опорная башня; 3 — стрела-манипулятор; 4 — бетонопровод; 5 — автобетононасос; 6 — приемный бункер
Применение манипуляторов для укладки бетонной смеси в монолитном строительстве позволяет исключить ручной труд и автоматизировать этот процесс. Особенно перспективны манипуляторы при бетонировании в скользящей опалубке.
В этом случае можно создать роботизированные скользящие комплексы, обеспечивающие автоматизированную укладку бетонной смеси, ее уплотнение, установку арматуры и управление подъемом опалубки. Создание таких комплексов дело ближайшего будущего. Они дадут возможность значительно расширить объем монолитного строительства и снизить его себестоимость.
Шарнирно распределительные стрелы нашли широкое распространение за рубежом. Они имеют до пяти секций общей длиной до 32 м и выпускаются в комплекте с бетононасосами в стационарном или в съемном вариантах. Ведущими производителями такого оборудования являются Германия и Япония. В Японии разработан робот для горизонтального распределения бетонной смеси в опалубки. Он укрепляется с помощью держателей на временной или постоянной опоре (рисунок 3.3). Манипулятор робота состоит из четырех звеньев коробчатой формы. В местах сочленений звеньев установлены пластмассовые подшипники. Каждое звено поворачивается с помощью гидравлических двигателей. Для улучшения операций укладки бетонной смеси центры вращения звеньев расположены немного эксцентрично по отношению к осям. На переднем звене манипулятора установлен привод для перемещения гибкого рукава в вертикальной плоскости (вверх-вниз), что позволяет легко избегать в процессе бетонирования торчащей арматуры и других препятствий. Для транспортировки бетонной смеси на звеньях манипулятора укреплены трубы диаметром 125 мм, имеющие разъемные соединения. На последнем звене установлен гибкий рукав, соединенный с бетонопроводом. Пульт управления выполнен подвижным и установлен на четвертом звене. Предусмотрено также дистанционное управление роботом. Гидравлический привод обычно размещается на первом звене и обеспечивает плавное перемещение звеньев. Манипулятор снабжается вибраторами для уплотнения бетонной смеси или инструментом для отделочных работ. Масса дополнительной оснастки может достигать 100 кг. В целях безопасности работ на каждом звене манипулятора установлены мигающие сигнальные лампы и звуковые зуммеры, которые начинают работать при включении робота. Четырехсекционная распределительная стрела манипулятора обеспечивает охват рабочей площади до 990 м2. Максимальная скорость движения рабочего органа при вращении любого звена не превышает 1 м/с. Время монтажа робота на объекте составляет около 1 ч. Робот может работать с производительностью подачи бетонной смеси до 170 м3/ч. Применение описанного робота на строительстве ряда административных зданий и промышленных объектов с большим объемом бетонных работ позволило исключить тяжелую работу по укладке и уплотнению бетонной смеси, уменьшить число рабочих, занятых на этих операциях, и повысить качество получаемых железобетонных конструкций.

Рисунок 3.3. Манипулятор для горизонтальной укладки бетона
1 — звенья манипулятора; 2 — бетонопровод; 3 — гибкий рукав
Представляет интерес предложенная в Японии система подачи и распределения бетона, состоящая из башенного крана и манипулятора, управляемого одним оператором. Схема исполнительного устройства крана-манипулятора обеспечивает управляемое пространственно ориентирование и позиционирование с заданной точностью. Для этого исполнительное устройство в отличие от традиционных строительных кранов построено по жесткой кинематической схеме.
При производстве бетонных работ на строительных площадках приходится выполнять большой объем ручных операций, связанных с установкой арматуры. Несмотря на применение унифицированных арматурных изделий, их установка характеризуется большой трудоемкостью. Повысить производительность труда и исключить тяжелый ручной труд позволяет применение манипуляторов и робототехнических устройств с комплектом сменных рабочих органов для установки и сварки арматурных сеток.
Автоматизированную укладку тяжелых стержней арматуры обеспечивает робот, разработанный и внедренный в Японии (рисунок 3.4). Он выполнен на базе гидравлического экскаватора и снабжен бортовой микроЭВМ. Его эффективно использовать в промышленном строительстве при укладке большого числа стержней арматуры массой до 100 кг. Применение робота в данном случае значительно сокращает сроки ведения работ, улучшает условия труда и сокращает число рабочих. Система управления машиной предусматривает три режима работы: непосредственное управление из кабины, дистанционное управление с выносного пульта и автоматизированное. Программа управления роботом позволяет автоматически раскладывать крупноразмерные стержни арматуры с фиксированным шагом, устанавливаемым оператор.
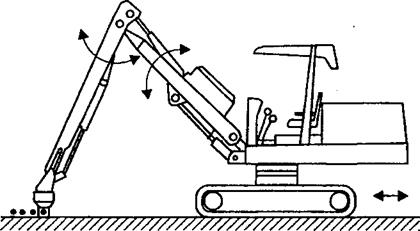
Рисунок 3.4. Робот для укладки сварки арматурных стержней
В Японии на строительных площадках нашла применение робототехническая система для чистовой затирки и шлифовки бетонных полов (рисунок 3.5). Она является многофункциональным устройством, которое выполняет движение по незастывшему бетону, производит выравнивание уложенного бетона, нанесение настилки, а также выполняет циклевку и окончательную отделку полов. Система представляет собой мобильный строительный робот, имеющий колесное шасси, двухзвенную руку с рабочим инструментом для обработки пола. Диаметр актуатора 102 см. Система работает в автоматическом режиме по программе, в которой задаются требования к геометрическим параметрам обрабатываемой поверхности пола, а также маршрут и скорость перемещений. Для управления движением применяют гидрокомпас, путеизмерительное устройство с сенсорными датчиками обнаружения проема и касания боковой поверхности. Система управления на базе микроЭВМ обеспечивает автономное движение при управлении от бортовой навигационной системы по данным гидрокомпаса и локатора. Скорость перемещения машины изменяется от 0 до 12 м/мин, а ее производительность составляет 200—300 м2 обрабатываемой поверхности в 1 ч.
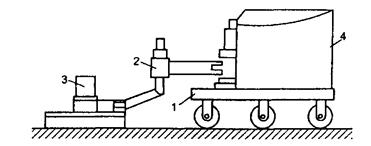
Рисунок 3.5. Робототехническая система для чистовой обработки
полов 1 — шасси; 2 — манипулятор; 3 — рабочий инструмент;
Перспективным направлением использования средств робототехники является набрызг-бетонирование. В Норвегии распространение получил роботизированный комплекс для набрызга бетонирования обводненными бетонными смесями. Исполнительное оборудование, управляемое роботами, обеспечивает производительность до 20 м3/ч, при этом осыпь составляет 5—10%. Насосное и распределительное оборудование монтируется на шасси или на самоходных тележках, а бетонная смесь поступает из автобетоносмесителя. Процессом набрызг-бетонирования управляет оператор.
Анализ отечественного и зарубежного опыта роботизации бетонных работ показывает, что в первую очередь необходимо обеспечить широкое внедрение на строительных объектах манипуляторов и РТК, обеспечивающих подачу, распределение и укладку бетонной смеси. Эти комплексы должны быть мобильны, иметь программное и дистанционное управление. Целесообразно создать 3—4 типоразмерных группы такого оборудования, отличающихся производительностью, высотой подачи, зоной обслуживания. Это оборудование обеспечит комплексную механизацию и автоматизированное управление укладкой и уплотнением бетонных смесей при устройстве фундаментов, бетонных полов, монолитных перекрытий, стен и колонн. Кроме того, необходимо создать комплекс оборудования в стационарном, исполнении для установки на перекрытиях возводимых объектов и на рабочих площадках опалубок. Перспективными следует считать работы по созданию роботизированных скользящих комплексов для строительства монолитных железобетонных зданий и сооружений. Целесообразно внедрять манипуляторы для установки арматурных каркасов, сборки и разборки опалубок.
|
|
|
|
|
Дата добавления: 2015-05-29; Просмотров: 2044; Нарушение авторских прав?; Мы поможем в написании вашей работы!