КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Механические характеристики электродвигателей
|
|
|
|
Классификация статических моментов и сил сопротивления движению
При рассмотрении работы электропривода производственного механизма необходимо, прежде всего, выявить соответствие механических свойств электродвигателя и производственного механизма, изучить их механические характеристики.
Момент нагрузки на валу рабочей машины (момент сопротивления движению) создается различными силами полезных и вредных сопротивлений. Эти моменты сопротивления классифицируются по характеру сил сопротивления движению или по конструкции рабочей машины и особенностям технологического процесса.
По характеру сил сопротивления движению все моменты статического сопротивления делятся на две группы:
Реактивные моменты сопротивления – это моменты, создаваемые силами трения или силами неупругих деформаций – растяжения, сжатия, скручивания или изгиба неупругих тел (силами реакции) и всегда направлены против движения, как показано на рис.2.1,а. (Mc=const). Поэтому характеристика реактивного МС имеет разрыв непрерывности при изменении знака направления движения (скорости ω). Направления МС против движения учитываются знаком (–) перед величиной этого момента в уравнении движения (2.1).
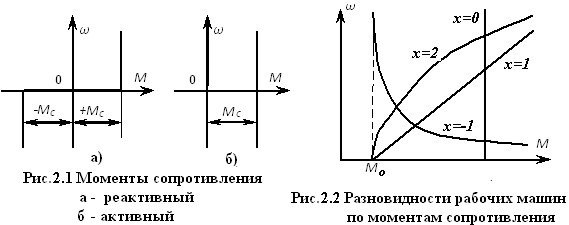
Активные (потенциальные) моменты сопротивления – это моменты, создаваемые силой тяжести или силами упругих деформаций (сжатие, скручивание, растяжение). Активные моменты сопротивления называются также потенциальными, так как они являются мерой измерения запаса потенциальной энергии движущихся масс или упруго-деформируемых элементов машин. Примерами активного МС являются, например, момент сопротивления, возникающий при упругой деформации пружины, момент сопротивления груза в подъемной установке. Активные моменты сопротивления могут быть направлены по движению или против него, то есть могут быть положительными или отрицательными. Например, в уравнении движения (2.1) знак активного момента перед MС при изменении направления движения не меняется как показано на (рис.2.1,б) для механизмов, в которых момент сопротивления создается массой груза, подвешенного на барабане лебедки подъемника.
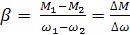
Все рабочие машины с точки зрения моментов сопротивления движению по их конструкции и особенностям технологического процесса можно разбить на несколько групп, для которых механическая характеристика механизма может быть представлена как зависимость момента сопротивления МС от различных факторов. Для ряда механизмов таким определяющим фактором является скорость движения рабочего органа. В этом случае зависимость МС=f(ω) может быть представлена математически следующим образом:
 , (2.3)
, (2.3)
где М0 – момент трения в движущихся частях механизма;
МСН – момент сопротивления при номинальной скорости ωн;
х – показатель степени.
На рис.2.2 приведены возможные механические характеристики рабочих машин МС=f(ω) при реальных значениях х:
- независимая от скорости (постоянный момент) (х=0),MС =MСН =const. Такой механической характеристикой обладают рабочие машины, преодолевающие трение (прокатные станы, бумагоделательные машины и др.), совершающие подъем грузов. Мощность в таких рабочих машинах с ростом скорости изменяется линейно, т.е. P=Мω.
- линейная характеристика (х=1),  т.е. момент растет линейно, а мощность квадратично со скоростью. Примером такой характеристики является привод генератора постоянного тока с независимым возбуждением, работающего на внешнюю постоянную электрическую нагрузку.
т.е. момент растет линейно, а мощность квадратично со скоростью. Примером такой характеристики является привод генератора постоянного тока с независимым возбуждением, работающего на внешнюю постоянную электрическую нагрузку.
- квадратичная характеристика (х=2),  В этом случае момент сопротивления пропорционален квадрату скорости, а мощность – скорости в 3-й степени. Такую механическую характеристику, называемую вентиляторной, имеют механизмы, преодолевающие сопротивление воздуха, газа или жидкости (вентиляторы, центрифуги, центробежные насосы, дымососы, судовые гребные винты и т.п.).
В этом случае момент сопротивления пропорционален квадрату скорости, а мощность – скорости в 3-й степени. Такую механическую характеристику, называемую вентиляторной, имеют механизмы, преодолевающие сопротивление воздуха, газа или жидкости (вентиляторы, центрифуги, центробежные насосы, дымососы, судовые гребные винты и т.п.).
- нелинейно-спадающая (гиперболическая) характеристика (х=-1) и  т.е. момент сопротивления обратно пропорционален скорости, мощность примерно постоянна. Такая характеристика у некоторых токарных и расточных станков, моталок кабельной продукции и др.
т.е. момент сопротивления обратно пропорционален скорости, мощность примерно постоянна. Такая характеристика у некоторых токарных и расточных станков, моталок кабельной продукции и др.
Кроме указанных механических характеристик, у которых момент сопротивления зависит от скорости рабочей машины, имеются механизмы, определяющие зависимость МС от других факторов:
- механическая характеристика с зависимостью момента сопротивления от пути, пройденном рабочим органом. В этом случае МС=f(S) или МС=f(α), где S и α – соответственно линейное или угловое перемещение рабочего органа. Примером таких механизмов является шахтный подъемник с неуравновешенным канатом (при больших глубинах шахт масса каната значительно превышает суммарную массу скипа и полезного груза), механизмы с кривошипно-шатунной передачей (например, ножницы гильотинного типа для резки металлов, поршневые насосы и компрессоры).
- механическая характеристика с зависимостью от случайных величин, когда изменение момента сопротивления определяется случайными факторами (например, появлениями вкраплений породы различной прочности, сказывающейся на нагрузке буровой установки, дробилки, ковша экскаватора). Момент сопротивления у таких рабочих машин определяется по статистическим данным.
Механическая характеристика электродвигателя определяет зависимость его скорости ω от развиваемого им момента M. Часто вместо угловой скорости ω используют внесистемную физическую величину – частоту вращения n, так как эти величины пропорциональны.
 (2.4)
(2.4)
В этом случае механической характеристикой электродвигателя называется зависимость частоты вращения n от развиваемого им момента M, т. е. n = f (M). Степень изменения скорости с изменением момента у различных типов электрических машин неодинакова и различаются в зависимости от жесткости механических характеристик (рис.2.3).
Под жесткостью механической характеристики β понимается отношение приращения момента ∆M к приращению скорости двигателя ∆ω:
 , (2.5)
, (2.5)
где M1, M2, ω1, ω2 – моменты и угловые скорости соответственно в первой и второй точках механической характеристики.

Рис.2.3 Определение жесткости Рис.2.4 Механические характеристики
механической характеристики электродвигателей
Механические характеристики электродвигателей можно разделить на четыре основных типа, приведенных на рис.2.4, в зависимости от жесткости β: - абсолютно жесткая механическая характеристика, при которой скорость с изменением момента остается неизменной. Из (2.5) следует, что если ∆ω=0, то β=∞. Такой характеристикой обладают синхронные двигатели (прямая 1);
- жесткая механическая характеристика, отличающаяся незначительным изменением угловой скорости с изменением момента. Жесткой механической характеристикой обладают асинхронные двигатели (кривая 2), и двигатели постоянного тока независимого и параллельного возбуждения прямая 4);
- мягкая механическая характеристика отличается значительным изменением угловой скорости с изменением момента. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения (кривая 3) и двигатели постоянного тока смешанного возбуждения (кривая 5);
- абсолютно мягкая механическая характеристика, при которой момент двигателя остается неизменным с изменением угловой скорости. Если ∆ M = 0, то из (2.5) следует β = 0. Абсолютно мягкой механической характеристикой обладают двигатели постоянного тока независимого возбуждения при питании обмотки якоря от источника тока (прямая 6).
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 2836; Нарушение авторских прав?; Мы поможем в написании вашей работы!