КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие принципы решения задач приведения
Приведение статических моментов, усилий, моментов инерции и движущихся масс к одному движению
Механическая часть электромеханической системы электропривода представляет собой сложную систему, включающую связанные движущиеся массы: двигателя, передаточного устройства и исполнительного механизма машины. Непосредственное представление о движущихся массах установки и механических связях между ними дает кинематическая схема электропривода. В кинематической схеме различные элементы системы движутся с разными скоростями, поэтому непосредственно сопоставлять их моменты инерции Ji, массы mj, нельзя. Поэтому одной из первых задач проектирования и исследования электроприводов является составление упрощенных расчетных схем механической части.
Задача может быть решена просто, если реальная система двигатель – передача – рабочая машина заменяется некоторой эквивалентной системой, движущейся с одной скоростью (обычно это скорость двигателя ω) и которая описывается лишь одним уравнением движения.
Эквивалентная система с приведенными значениями параметров должна обладать теми же статическими и динамическими свойствами, что и реальная система. При инженерных расчетах механические связи можно принять абсолютно жесткими (не учитывать упругость звеньев и наличие зазоров в передачах). Тогда движение одного элемента дает полную информацию о движении всех остальных элементов, и достаточно рассматривать один элемент. В качестве такого элемента обычно принимают вал двигателя.
Таким образом, чтобы решить задачу приведения, надо составить уравнения баланса кинетических энергий, мощностей для реальной и эквивалентной систем c учетом потерь мощности в системе.
Задача приведения показана на примерах (рис.2.7,а и 2.7,б) систем электропривода с вращательным и поступательным движениями механизмов.
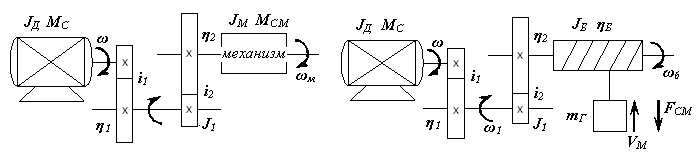
а) б)
Рис.2.7 Кинематические схемы механизмы с вращательным движением и поступательным движением механизмов
Принятые обозначения на рис.2.7:
JД, J1, JМ, JБ – моменты инерции двигателя и деталей на его валу, деталей на промежуточном валу, рабочей машины и барабана;
ω, ω1, ωБ – скорости вращения двигателя, промежуточного вала и рабочей машины;
i1, i2, η1, η2 - передаточные числа ступеней передач и их КПД;
ηБ – КПД рабочей машины;
MC, MCM – приведенный к валу двигателя момент сопротивления, момент сопротивления рабочей машины;
mГ, VМ, FСМ – масса груза, линейная скорость перемещения и сила сопротивления рабочей машины.
|
|
Дата добавления: 2015-06-04; Просмотров: 702; Нарушение авторских прав?; Мы поможем в написании вашей работы!