КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Равновесие навесного плуга в вертикально-продольной плоскости
|
|
|
|
Заданная глубина обработки почвы навесным плугом обеспечивается за счет постановки на него опорного колеса.
Для устойчивого хода навесного плуга в вертикально-продольной плоскости необходимо, чтобы реакция почвы на опорное колесо плуга была в определенных пределах. Если давление опорного колеса на почву мало, то при затуплении лемехов плуг может быть вытолкнут на поверхность. Считается, что для сохранения условий заглубления корпусов с затупленными лезвиями лемехов необходимо, чтобы на каждый корпус приходилась вертикальная нагрузка не менее Q1=25кг [2]. Общее давление на опорное колесо, достаточное для заглубления плуга при любом состоянии лемехов, окажется равным
 ,
,
где n – число корпусов плуга.
Если давление колеса на почву слишком велико, то поверхность поля не удержит плуг и он будет погружаться в почву, увеличивая установленную глубину вспашки.
Максимально возможное давление на колесо Qmax можно определить по несущей способности почвы и параметрам опорного колеса. В теории колесного хода доказывается [2], что
 ,
,
где В – ширина обода колеса – В=15…20 см;
D – диаметр опорного колеса, см;
k – коэффициент, учитывающий условия работы колеса, для плужных колес, - k=3…4.
Давление опорного колеса на почву может быть снижено включением гидродогружателя ведущих колес трактора, так как в этом случае часть вертикальной нагрузки плуга будет передана на трактор.
Таким образом, решение задачи по анализу устойчивости хода плуга в первом приближении сводится к определению усилия Q, действующего на обод опорного колеса.
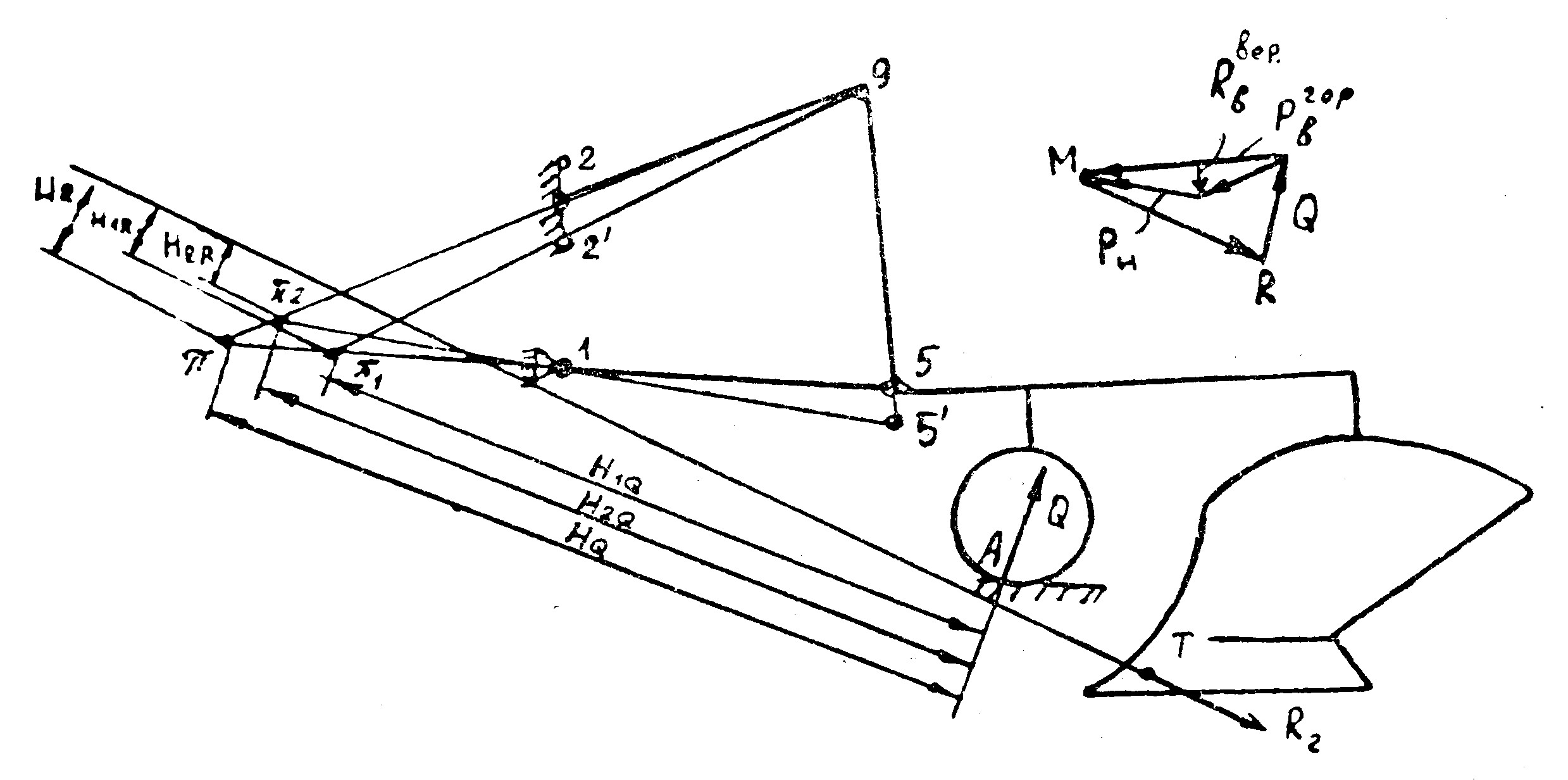
Наиболее просто усилие Q может быть найдено графоаналитическим методом, для чего необходимо в выбранном масштабе изобразить механизм навески трактора с навесным плугом (рис. 3.2).
| Рис. 3.2. Схема механизма навески |
Построение схемы механизма можно начать с проведения трех горизонтальных прямых, соответствующих дну борозды, поверхности поля и осевой линии рамы плуга, проходящей через точку 5 (ось подвеса плуга). На расстоянии R радиуса колеса (или звездочки гусеницы) от поверхности поля выбирают точку О, через которую проводят координатные оси х и у. По координатам хi и yi определяют центры присоединительных подшипников, точек 1, 2, 3 и 4. Взяв в раствор циркуля величину нижней тяги механизма навески (звено 1 – 5), можно провести дугу с центром в точке 1 до пересечения с осевой линией рамы плуга и определить тем самым точку 5, которую еще называют осью подвеса плуга 5 – 9. На пересечении дуг, проведенных из точек 6 и 3 радиусами, равными длинам звеньев 6 – 7 и 3 – 7, находится точка 7 и под углом α к отрезку 3 – 7 можно провести кулак 3 – 8. между точками 4 и 8 располагают гидроцилиндр. Длина гидроцилиндра определится только взаимным расположением точек 4 и 8 и в общем случае окажется между (4 – 8) max и (4 – 8) min. Центр опорного колеса плуга находится на заданном расстоянии от оси подвеса (точка 5) по горизонтали и D/2 от поверхности поля по вертикали. По координатам центра тяжести плуга относительно оси подвеса и дна борозды находят точку S и помещают в нее вектор силы тяжести G. Аналогичным способом находят точку Е, к которой приложена равнодействующая сил сопротивления почвы Rzx в вертикально-продольной плоскости. От дна борозды точка Е расположена на расстоянии половины глубины обработки, т.е. а /2. Точка Е принадлежит среднему (если число корпусов нечетное) или условно среднему (если четное) корпусу. Этот корпус изображают так, чтобы его полевой обрез проходил через точку Е, а лезвие лемеха и полевая доска находились на линии дна борозды. Вектор силы трения F полевой доски о стенку борозды проходит параллельно дну борозды на высоте, равной половине ширины полевой доски. Положение силы Q определяется углом наклона ее к вертикали:
 ,
,
где μ – коэффициент перекатывания колеса (μ=0,150–0,20).
Силы G, Rzx и F могут быть заменены одной общей равнодействующей. Для ее нахождения можно на свободном поле чертежа в некотором масштабе построить «веревочный» многоугольник сил, т.е. произвести их векторное сложение. Из точки М опускают вектор силы G, к концу которого присоединяют векторы Rz и Rx. Сумма G и Rzx определит значение R1, а точка ее приложения C – место пересечения G и Rzx. Векторная сумма R1 и F представит собой общую равнодействующую сил, действующих на корпус R2. Точкой приложения этой суммы является T, в которой пересекаются F и R1.
Если лемех становится тупым, то сила Rz может свое направление изменить (рис. 3.3).
| Рис. 3.3. Определение равнодействующей R2 при тупом лемехе |
Способ определения Q обычно выбирают в зависимости от того, находится или нет точка π – центр мгновенного вращения механизма навески – в пределах чертежа. Поскольку колебания плуга приводят к повороту нижних и верхних тяг механизма навески, то центр вращения системы будет расположен на продолжении звеньев 1 - 5 и 2 – 9. Точка пересечения этих направлений π будет являться центром мгновенного вращения навесного плуга относительно трактора. Если π находится в пределах чертежа, то остается лишь определить плечи действия сил R2 и Q относительно π и составить уравнение моментов (рис. 3.4). К сожалению, чаще точка π находится вне пределов чертежа. В этих случаях для определения Q используют метод Н.Е. Жуковского. Прежде всего, необходимо построить повернутый план скоростей для тех точек, к которым приложены силы, а затем к соответствующим точкам плана скоростей прикладывают действующие силы и составляют уравнение моментов этих сил относительно полюса плана скоростей (рычаг Жуковского). Из уравнения моментов находят искомые силы по известным (рис. 3.5).
Обычно план скоростей строят непосредственно на механизме, чтобы избежать переноса направлений его звеньев.
| Рис. 3.4. Определение реакции Q на ободе колеса плуга (центр мгновенного вращения находится в пределах чертежа) |

| Рис. 3.5. Определение реакции Q на ободе колеса плуга методом Н.Е. Жуковского |
Пусть полюсом плана скоростей будет точка 1. Скорость точки 5 направлена перпендикулярно отрезку 1 – 5, а на повернутом плане скоростей она совпадает с 1 – 5. Масштаб построения плана скоростей может быть произвольным, в том числе и таким, при котором скорость точки 5 будет представлена отрезком 1 – 5.
Скорость любой точки плуга может быть представлена в виде суммы абсолютной скорости оси подвеса 5 и относительной скорости вокруг нее. Например, скорости точки 9:
 .
.
В этом уравнении скорость  уже определена на плане скоростей, как по величине, так и по направлению. Скорости
уже определена на плане скоростей, как по величине, так и по направлению. Скорости  и
и  известны по направлению. В самом деле, точка 9 может перемещаться лишь перпендикулярно отрезку 2 – 9, а на повернутом плане скоростей направление
известны по направлению. В самом деле, точка 9 может перемещаться лишь перпендикулярно отрезку 2 – 9, а на повернутом плане скоростей направление  совпадает с направлением звена 2 – 9. Из полюса плана скоростей, следовательно, необходимо провести линию 1 – 9, параллельную 2 – 9, до пересечения с отрезком 5 – 9, который определит направление
совпадает с направлением звена 2 – 9. Из полюса плана скоростей, следовательно, необходимо провести линию 1 – 9, параллельную 2 – 9, до пересечения с отрезком 5 – 9, который определит направление  на повернутом плане скоростей. Пересечение направлений скоростей
на повернутом плане скоростей. Пересечение направлений скоростей  и
и  определит точку 9. Отрезок 1 – 9 плана скоростей опишет скорость
определит точку 9. Отрезок 1 – 9 плана скоростей опишет скорость  , а 5 – 9 – соответственно
, а 5 – 9 – соответственно  . После того как найдена относительная скорость одной из точек плуга (9), легко может быть определена скорость любой другой точки. Поскольку анализируемые силы Q и R2 приложены к точкам А и Т, то нужно найти скорость этих точек. Скорость точки А
. После того как найдена относительная скорость одной из точек плуга (9), легко может быть определена скорость любой другой точки. Поскольку анализируемые силы Q и R2 приложены к точкам А и Т, то нужно найти скорость этих точек. Скорость точки А
 .
.
Относительная скорость  в действительности направлена перпендикулярно отрезку 5 – А, представляющего собой радиус вращения точки А вокруг 5. На повернутом плане скоростей направление
в действительности направлена перпендикулярно отрезку 5 – А, представляющего собой радиус вращения точки А вокруг 5. На повернутом плане скоростей направление  совпадает с направление А – 5. Скорость
совпадает с направление А – 5. Скорость  может быть определена и по величине. В самом деле, отрезок, выражающий скорость
может быть определена и по величине. В самом деле, отрезок, выражающий скорость  на плане скоростей должен быть во столько раз меньше отрезка А – 5, во сколько отрезок 5 – 9 равный относительной скорости
на плане скоростей должен быть во столько раз меньше отрезка А – 5, во сколько отрезок 5 – 9 равный относительной скорости  меньше отрезка 9 – 5. Иными словами,
меньше отрезка 9 – 5. Иными словами,
 ,
,
где l (А-5) – длина отрезка А-5.
l (5-9) – длина отрезка 5-9.
Скорость  может быть вычислена по этому соотношению, но можно ее найти и графически. Для этого точку 9 необходимо соединить с А, а затем из точки 9 провести линию 9 – А параллельно А – 9. Поскольку треугольник А, 5, 9 плана скоростей будет подобен А, 5, 9, то соотношение относительных скоростей
может быть вычислена по этому соотношению, но можно ее найти и графически. Для этого точку 9 необходимо соединить с А, а затем из точки 9 провести линию 9 – А параллельно А – 9. Поскольку треугольник А, 5, 9 плана скоростей будет подобен А, 5, 9, то соотношение относительных скоростей  и
и  будет таким, как соотношение длин звеньев А – 5 и 5 – 9. Итак, точка А, выражающая скорость точки А, на плане скоростей найдена.
будет таким, как соотношение длин звеньев А – 5 и 5 – 9. Итак, точка А, выражающая скорость точки А, на плане скоростей найдена.
Аналогично может быть определена скорость точки Т. Для этого точку 5 соединяют с Т, точку 9 с Т, а затем из точки 9 проводят линию 9 – Т до пересечения с отрезком Т – 5. Точка пересечения Т определит на плане скоростей скорость точки Т.
Поместим в соответствии с методом Н.Е. Жуковского равнодействующую R2 в точку Т плана скоростей, а Q – в А.
Уравнение моментов действующих сил относительно полюса плана скоростей будет таким:

где HQ и HR2 – плечи действия сил Q и R2 относительно полюса плана скоростей, измеренные непосредственно на чертеже. Исходная сила
 .
.
Если Q окажется больше Qmin и меньше Qmax, то можно считать, что устойчивость хода плуга обеспечена, т.е. при затуплении лемехов корпусы не будут вытолкнуты из почвы, а при острых лезвиях опорное колесо удержит рабочие органы на заданной глубине.
Однако работа при силе Q близкой Qmax, нежелательна, так как большое давление опорного колеса на ….. приведет к повышенному сопротивлению вспашке и, следовательно, увеличению расхода топлива на эту энергоемкую операцию. Кроме того, с увеличением сопротивления вспашке повышается степень буксования ведущих колес трактора, что также способствует росту расхода топлива. Для устранения указанных недостатков на современных тракторах установлены механические или гидравлические увеличители сцепного веса ГСВ [3].
Принцип действия их один и тот же, он основан на перенесении части веса машины или даже части вертикальных рабочих нагрузок на ведущие колеса трактора. Механический увеличитель сцепного веса (догружателем ведущих колес) помещен на навесном устройстве. Он представляет собой неподвижно прикрепленную к трактору серьгу 2 (рис. 3.6), в которой сделано несколько отверстий для крепления переднего конца верхней тяги 2 – 9.
| Рис. 3.6. Схема механического увеличителя сцепного веса |
Пусть в исходном положении центр мгновенного вращения механизма навески в точке π. Как уже отмечено ранее (рис. 3.4), сила Q в этом случае определится соотношением
 .
.
Если передний конец верхней тяги механизма навески переместить в точку 2´, то центр мгновенного вращения π переместиться в точку π1, а
 .
.
Величины плеч H1R и H1Q измениться, но степень уменьшения плеча H1R значительно больше, чем H1Q, поэтому давление колеса на почву снизится.
Практическим с теми же результатами можно прийти переместив нижние тяги 1 – 5 на палец 5´; размещенный на понизителе некоторых тяжелых плугов. В этом случае центр мгновенного вращения оказывается в точке π2 и степень уменьшения Q становится еще более значительной: H2R≈H1R, а H1Q<H2Q<HQ.
На рис. 3.6 построен многоугольник сил, действующих на плуг. Из точки М проведено направление R2, а из конца вектора R2 – сила Q. Поскольку сумма сил, действующих на плуг в условиях статического равновесия, должна равняться нулю, то замыкать многоугольник должна сила Р, передающаяся через тяги трактора к плугу. В свою очередь, сила Р может быть представлена как векторная сумма сил, действующих в верхней и нижней тягах, т.е.
 .
.
Чем больше наклон верхней тяги, тем больше окажется и вертикальная составляющая  этой силы, которая, воздействуя на трактор, прижимает его колеса к почве.
этой силы, которая, воздействуя на трактор, прижимает его колеса к почве.
Более совершенным методом увеличения сцепления колес с почвой следует считать использование гидравлического увеличителя сцепного веса. При включенном ГСВ тракторист может установить определенное давление опорного колеса плуга на почву. Воспринимая часть силы веса плуга на себя, трактор увеличивает сцепные свойства, а степень буксования уменьшается. Разумеется, давление масла в гидроцилиндре нельзя поднимать выше того значения, когда окажется
 ,
,
так как в противном случае при затуплении лемехов произойдет уменьшение установленной глубины вспашки.
Определение допустимой величины давления масла в гидроцилиндре при использовании ГСВ может быть произведено также с использованием метода Н.Е. Жуковского. В этом случае силу Q следует считать известной и принять ее равной Qmin, а искомой будет сила Р, с которой шток гидроцилиндра должен воздействовать на кулак подъема механизма навески для обеспечения заданного значения Q.
|
| Рис. 3.7. Определение силы воздействия гидроцилиндра на механизм навески при включенном ГСВ |
Построение плана скоростей для точек приложения сил Qmin и R2 не отличается от того, как это было сделано на рис. 3.5. Новым является необходимость определения скорости точки 8, к которой приложена сила Р. Точка 8 принадлежит к кулаку 8 – 3 – 7 подъема механизма навески. По кинематической цепи ближайшей к известным скоростям является точка 7 этого кулака.
 .
.
В этом уравнении скорость  известна по величине и направлению, так как если скорость точки 5 выражается отрезком 1 – 5 на плане скоростей, то скорость 6 в этом же масштабе выразится отрезком 1 – 6. Скорость точки 7 на повернутом плане скоростей по направлению совпадает со звеном 3 – 7, а
известна по величине и направлению, так как если скорость точки 5 выражается отрезком 1 – 5 на плане скоростей, то скорость 6 в этом же масштабе выразится отрезком 1 – 6. Скорость точки 7 на повернутом плане скоростей по направлению совпадает со звеном 3 – 7, а  - с отрезком 6 – 7. Если направление скорости
- с отрезком 6 – 7. Если направление скорости  провести из полюса плана скоростей 1, то на пересечении со звеном 6 – 7 можно найти точку 7´, которая определит скорость точки 7 на повернутом плане скоростей.
провести из полюса плана скоростей 1, то на пересечении со звеном 6 – 7 можно найти точку 7´, которая определит скорость точки 7 на повернутом плане скоростей.
Когда известна скорость точки 7, то скорость точки 8 найти нетрудно. Направление скорости точки 8 на повернутом плане скоростей совпадает с направлением звена 3 – 8 (из полюса 1 проводим линию 1 - 8´ параллельно 3 – 8), а величина отрезка плана скоростей 1 - 8´, отражающая скорость  , должна быть во столько же раз быть меньше отрезка 1 – 7 (скорость точки
, должна быть во столько же раз быть меньше отрезка 1 – 7 (скорость точки  ), во сколько отрезок 3 – 8 меньше кулака 3 – 7. если из точки 7´ провести прямую, параллельную 7 – 8, то направлением 1 - 8´ будет определена точка 8´, а скорость точки 8 на плане скоростей будет представлена отрезком 1 - 8´. В точку 8´ плана скоростей нужно перенести силу Р и составить уравнение моментов сил относительно полюса плана скоростей, предварительно измерив величину плеч действия сил:
), во сколько отрезок 3 – 8 меньше кулака 3 – 7. если из точки 7´ провести прямую, параллельную 7 – 8, то направлением 1 - 8´ будет определена точка 8´, а скорость точки 8 на плане скоростей будет представлена отрезком 1 - 8´. В точку 8´ плана скоростей нужно перенести силу Р и составить уравнение моментов сил относительно полюса плана скоростей, предварительно измерив величину плеч действия сил:
 ,
,
откуда
 .
.
После определения Р можно найти давление в гидроцилиндре при использовании ГСВ:
 .
.
где Fпорш – площадь поршня гидроцилиндра;
d – диаметр поршня гидроцилиндра.
С помощью ГСВ тракторов МТЗ-80 и МТЗ-82, например, давление подпора может быть установлено в пределах 0,8…2,8 МПа (8…28 кг/см2), что позволяет увеличить нагрузку на заднюю ось трактора при работе с плугом на 4000…5000 Н (400..500 кг). Считается, что увеличение давления в цилиндре на 0,1 МПа (1 кг/см2) снижает буксование трактора примерно на 1%.
Поскольку сила сопротивления почвы R2 непрерывно меняется во времени, то наиболее эффективное использование трактора на вспашке возможно за счет использования автоматического регулирования пахотного агрегата. В качестве параметров регулирования в существующих системах автоматического регулирования (САР) используют глубину хода рабочих органов, нагрузку на опорные колеса, положение (позицию) машины относительно трактора, загрузку двигателя трактора, давление масла в гидросистеме и др. Однако наибольшее применение получили силовые САР с параметрами регулирования – усилиями в верхней и нижней тягах навески с дополнительными контурами позиционного регулирования. В качестве примера приведена принципиальная схема силового и позиционного регулирования тракторов МТЗ-80 и МТЗ-82 для работы с навесными плугами (рис. 3.8).
Изменение сопротивлений R(t) при вспашке воспринимается через верхнюю центральную тягу 2´ - 9 навесного механизма пластинчатой пружиной 5. Верхняя часть рычага, закрепленного в точке 2 тягой 11-13, связана с силовым регулятором 4. Благодаря этой связи деформация пружины 5 передается золотнику регулятора 4, который переключает поток масла, идущий от насоса 2 через распределитель 3, в ту или иную полость гидроцилиндра 6. Поршень гидроцилиндра через механизм навески меняет положение плуга по высоте. Настройка системы на заданное усилие в верхней тяге производится рукояткой регулятора за счет смещения подвижной втулки относительно золотника.
Работа силовой системы рассчитана на пропорциональное изменение усилия в верхней тяге навески при изменении глубины вспашки. При подъеме плуга глубина вспашки уменьшается, соответственно уменьшится и усилие в верхней тяге навески. Когда усилие достигнет настроечного значения, золотник установится в нейтральное положение.
| Рис. 3.8. Схема силового и позиционного регулирования тракторов МТЗ-80 и МТЗ-82: 1– бак для масла; 2 – насос гидросистемы; 3 – распределитель гидросистемы; 4 – силовой (позиционный) регулятор; 5 – пластинчатая пружина (датчик силового регулирования; 8 – 10 – рычаг, связанный с кулаком подъема плуга (датчик позиционного регулирования); 6 – гидроцилиндр |
Позиционный контур предназначен для регулирования положения рабочей машины относительно трактора. Он может быть использован для ограничения чрезмерного перемещения плуга по высоте при силовом регулировании. В позиционном контуре регулирования датчиком является поворотный рычаг 3 – 10, связанный со штоком гидроцилиндра 6. Через тягу 10 – 12 повороты рычага 3 – 10 передаются на золотник, который направляет масло в ту или иную полость гидроцилиндра, серьга 2 – 11 снабжена отверстиями для перестановки верхней тяги 2 – 9. При работе с силовым регулятором тягу переставляют в верхнее отверстие серьги, а без него – в нижнее.
Другим направлением развития конструкции почвообрабатывающих орудий, способствующих повышению эффективности загрузки двигателя и снижению буксования колес, является создание семейства плугов с изменяемой шириной захвата. Дело в том, что в связи с изменением свойств почв тяговое сопротивление плугов с постоянной шириной захвата может меняться более чем в 3 раза. Естественно, что увеличение тягового сопротивления сверх установленных пределов ведет к потере устойчивости работы агрегата и росту буксования колес иногда до 30…40%. У плугов с изменяемой шириной захвата рама выполнена в виде шарнирного четырехзвенника. Регулирование ширины захвата осуществляется механизатором из кабины с помощью гидросистемы (табл. 3.1).
Таблица 3.1
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 4076; Нарушение авторских прав?; Мы поможем в написании вашей работы!