КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плоская система произвольно расположенных сил 2 страница
|
|
|
|
Пример выполнения задания
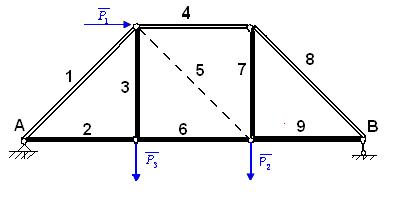
Дано: схема фермы (рис. 16). Р1=10 кН; Р2= 20 кН; Р3=10 кН; а=2 м.
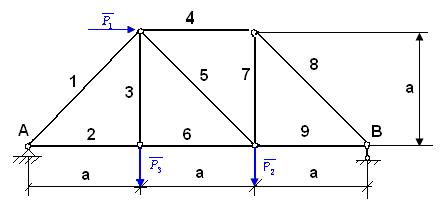
Рисунок 16
Решение:
1. Производим проверку условия геометрической неизменяемости и статической определимости фермы по формуле
S = 2n – 3,
где S – число стержней фермы;
n – число узлов фермы.
Подставляя S = 9 и n = 6, получаем, что
9 = 2 · 6 – 3 = 9 → 9 = 9
Это означает, что форма статически определяемая.
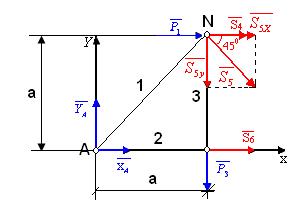
2. Определение реакций опор А и В (т. е. уравновесить ферму внешне) – рис. 17.
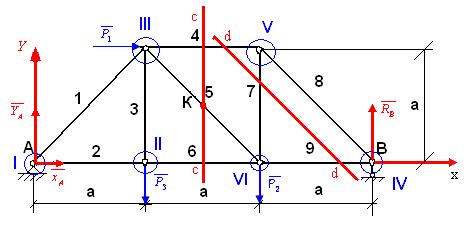
Рисунок 17
Освобождаем ферму от связей, заменяя их действие соответствующими силами реакции:  ,
,  - две составляющие реакции неподвижной шарнирной опоры А;
- две составляющие реакции неподвижной шарнирной опоры А;  - реакция опорного стержня В (направлена вдоль стержня) – рис. 17.
- реакция опорного стержня В (направлена вдоль стержня) – рис. 17.
Заданные силы -  ,
,  ,
,  (активные) и реакции опор - , , (реактивные) образуют плоскую произвольную систему сил, для которой можно составить три уравнения равновесия:
(активные) и реакции опор - , , (реактивные) образуют плоскую произвольную систему сил, для которой можно составить три уравнения равновесия:
1. ∑ Fkx = 0; XA + P1 = 0 → XA = – P1 = – 10 кН;
2. ∑ Fky = 0; YA – P3 – P2 + RB = 0
3. ∑ MA ( ) = 0; – aP3 – aP1 – 2aP2 + 3aRB = 0 =>
) = 0; – aP3 – aP1 – 2aP2 + 3aRB = 0 =>
 кН.
кН.
Подставляем найденное значение реакцию в уравнение 2 и определяем реакцию YA:
YA = Р3 + Р2 – RB = 10 + 20 – 20 = 10 кН
Проверка: точка К находится на середине вертикального и горизонтального размеров фермы.
∑ MA () = 0; -15аYA + 0,5aXA – 0,5aP1 – 0,5aP2 + 0,5aP3 + 1,5aRB = 0; => –1,5 · 2 · 10 + 0,5·2 ∙(–10) – 0,5·2·10 +0,5·2·10 – 0,5·2·20 + 1,5·2·20 = 0 => –30 – 10 – 10 – 20 + 10 + 60 = 0; –70 + 70 = 0; 0 ≡ 0.
Знак «–» в значении реакции указывает на то, что она направлена противоположно, чем показано на рис. 17, чтобы обеспечить равновесие полученной плоской произвольной системы сил.
Итак, ХА = -10 кН; YA = 10 кН; RB = 20 кН.
3. Определение усилий в стержнях фермы
а) способ вырезания узлов (аналитический).
Введем следующую нумерацию узлов и стержней фермы (узлы обозначены римскими, а стержни – арабскими цифрами) – рис. 17.
Вырезаем сначала узел I, в котором сходятся только 2 стержня с неизвестными усилиями. Усилия в стержне обозначим соответственно через  ,
,  ….
….  . Действия перерезанных стержней 1 и 2 заменим усилиями и , направленные от узла, предполагая, что все стержни растянуты – рис. 17. Силы, действующие на узел I, образуют плоскую систему сходящихся сил, поэтому можно составить уравнения равновесия.
. Действия перерезанных стержней 1 и 2 заменим усилиями и , направленные от узла, предполагая, что все стержни растянуты – рис. 17. Силы, действующие на узел I, образуют плоскую систему сходящихся сил, поэтому можно составить уравнения равновесия.
Узел I.
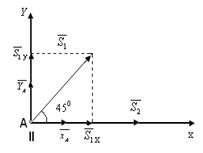 ∑ Fkx = 0; XA + S1cos450 + S2 =0 (1)
∑ Fkx = 0; XA + S1cos450 + S2 =0 (1)
∑ Fky = 0; YA + S1cos 450 = 0 (2)
Решая полученную систему уравнений, находим усилия в стержнях 1 и 2:
Рисунок 18
Из 2): S1 = – yA / sin45o = – 10 / ( ) = – 14,14 кН (сжат)
) = – 14,14 кН (сжат)
Подставляем найденные значения S1 в уравнение 1) и вычисляем S2:
S2 = – xA – S1 cos 45o = – ( – 10) – ( – 14,14) . () = 10 + 10 = 20 кН (растянут)
Положительный знак в значении S2 показывает, что стержень 2, из выше принятого предположения, действительно растянут, а отрицательный знак в значении S1 – что стержень сжат.
Следующим вырезаем узел II, в котором сходятся не более 2-х стержней (3 и 6) с неизвестными усилиями. Усилие S2 направляем соответственно тому, что это внутреннее усилие в стержне (простейшая уравновешенная система сил).
Узел II:
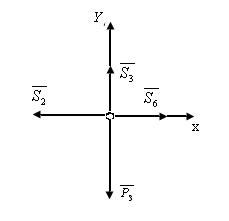 ∑Fkx = 0; S6 – S2 = 0 (1)
∑Fkx = 0; S6 – S2 = 0 (1)
=> S6 = S2 = 20 кН (растянут).
∑Fky = 0; S3 – P3 = 0 (2)
=> S3 = P3 = 10 кН (растянут).
Рисунок 19
Аналогично вырезаем все остальные узлы.
 Узел III:
Узел III:
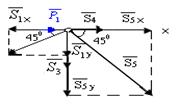
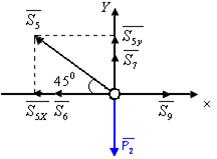
∑Fkx = 0; -S1 .cos 45o + P1 + S4 + S5 . cos 45o = 0; (1)
Рисунок 20 ∑Fky = 0; -S1 . sin45o – S3 – S5 .  sin45o = 0 (2) => S5 =
sin45o = 0 (2) => S5 =  =
=  =0 => (нулевой стержень).
=0 => (нулевой стержень).
Подставляем S5 в 1) и находим значение усилия S4:
S4 = S1 cos 45o – P1 – S5 cos 45o = - 14,14. ( ) – 10 = - 10 - 10 = − 20 кН (сжат).
) – 10 = - 10 - 10 = − 20 кН (сжат).
Узел IV:
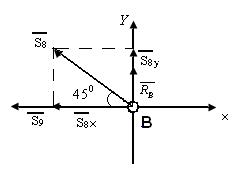 ∑Fkx = 0; − S9 − S8.cos 450 = 0 (1)
∑Fkx = 0; − S9 − S8.cos 450 = 0 (1)
∑Fky = 0; Rв + S8.sin 450 = 0 (2) =>
=> S8 = −  = −
= −  = − 28,28 кН (сжат).
= − 28,28 кН (сжат).
Рисунок 21
Из 1): S9 = −S8.cos 450 = − (−28,28). () = 20 кН (растянут).
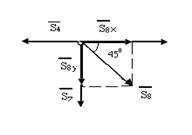 Узел V:
Узел V:
∑Fkx = 0; −S4 + S8.cos 450 = 0 (1)
− (−20) – 28,28  =0; 20 – 20 = 0; 0 = 0
=0; 20 – 20 = 0; 0 = 0
Рисунок 22
∑Fky = 0; –S8.sin 450 – S7 = 0
=> S7 = –S8.sin 450 = – (– 28,28) = 20 кН (растянут).
Узел VI (проверочный):
 ∑Fkx = 0; –S5 · cos 450 – S6 +S9 = 0; (1)
∑Fkx = 0; –S5 · cos 450 – S6 +S9 = 0; (1)
–0 – 20 + 20 = 0; 0 ≡ 0
∑Fky = 0; S5 · sin 450 + S7 – P2 = 0; (2)
0 · ( ) + 20 – 20 = 0; 0 ≡ 0;
) + 20 – 20 = 0; 0 ≡ 0;
Рисунок 23
б) способ Риттера (способ сечений) – определение усилий в стержнях 5, 6, 9.
Мысленно рассекаем ферму на две части так, чтобы число рассеченных стержней, в которых усилия еще не известны, не превышало трех.
Для стержней 5 и 6 сечение С-С (рис. 17). Рассматриваем равновесие левой от сечения С-С части фермы – рис. 24. Действие рассеченных стрежней 4, 5, 6 заменяем их внутренними усилиями S4, S5, S6 соответственно, направленными по стержням от узлов, предполагая, что стержни растянуты. Для полученной плоской произвольной системы сил можно составить 3 уравнения равновесия. Точка Риттера – это моментная точка.
 Для стержня 6 точка N – точка Риттера – точка пересечения линий действия усилий S4
Для стержня 6 точка N – точка Риттера – точка пересечения линий действия усилий S4  и S5.
и S5.
∑MN(FK) = 0; a S6 + aXA – a YA = 0 => S6 =  = 10- (-10) = 20 кН (растянут).
= 10- (-10) = 20 кН (растянут).
Рисунок 24
Для стержня 5 точки Риттера нет.
∑Fky = 0; –S5 sin450 – P3 + YA = 0; => S5 =  =
=  = 0 (нулевой стержень)
= 0 (нулевой стержень)
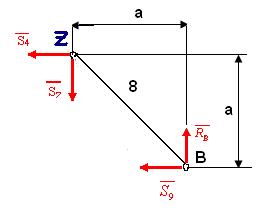 Для определения внутреннего усилия в стержне 9 мысленно рассекаем ферму сечением d-d (рис. 17) и рассматриваем равновесие правой от сечения части фермы – рис. 25.
Для определения внутреннего усилия в стержне 9 мысленно рассекаем ферму сечением d-d (рис. 17) и рассматриваем равновесие правой от сечения части фермы – рис. 25.
Точка Z – точка Риттера для стержня 9.
∑MZ(FK) = 0; –a S9 + aRB = 0 => S9 = Рисунок 25 =  = RB = 20кН (растянут).
= RB = 20кН (растянут).
Численные значения внутренних усилий S5, S6, S9 соответственно стержней 5, 6, 9,определенные по методу вырезания узлов фермы и способом сечений (метод Риттера) абсолютно равны. Схема фермы с фактической картиной сил

 сжатый стержень
сжатый стержень
 растянутый стержень
растянутый стержень
 стержень, сила которого равна нулю (нулевой стержень) Рисунок 26
стержень, сила которого равна нулю (нулевой стержень) Рисунок 26
Результаты расчетов внутренних усилий в стержнях фермы сводим в таблицу 4.
Таблица 4.
| Номер стержня | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Знак силы | – | + | + | – | 0 | + | + | – | + |
| Сила, кН | 14,14 | 20 | 10 | 20 | 0 | 20 | 20 | 28,28 | 20 |
Ниже приводятся схемы расчётных заданий – рис. 27 – 33 (стр.36 – 42).
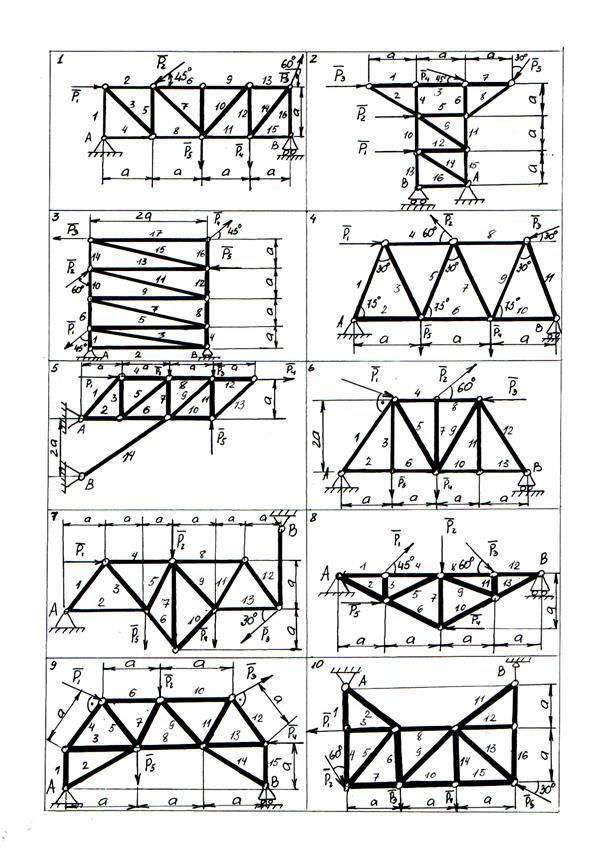
Рисунок 27
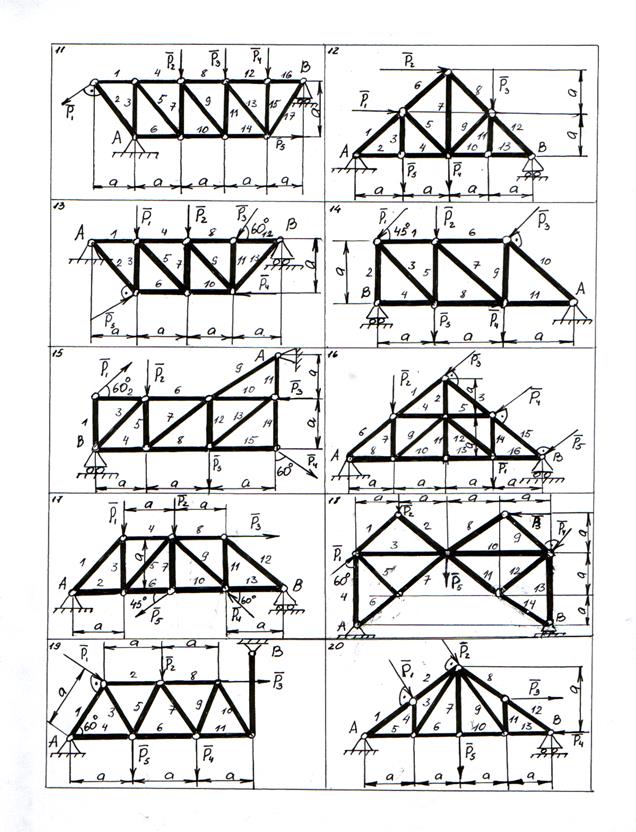
Рисунок 28
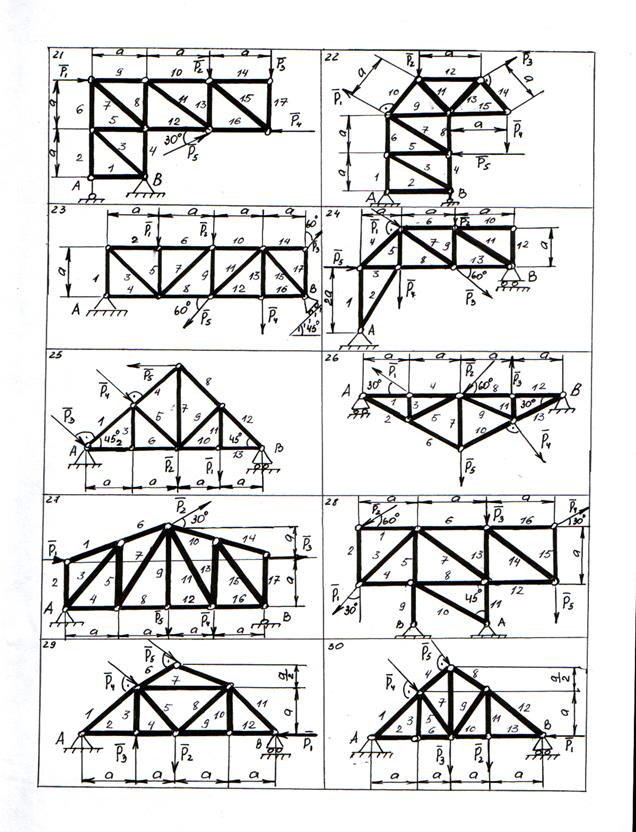
Рисунок 29
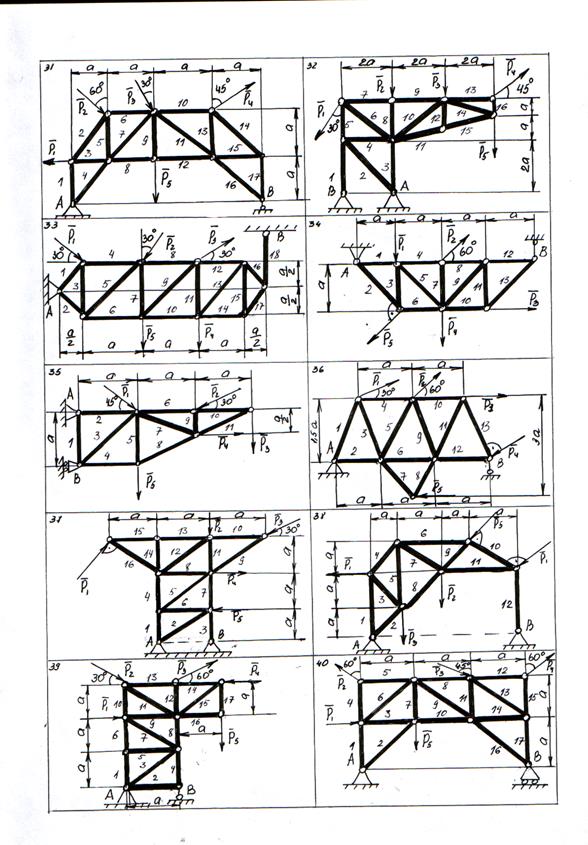
Рисунок 30
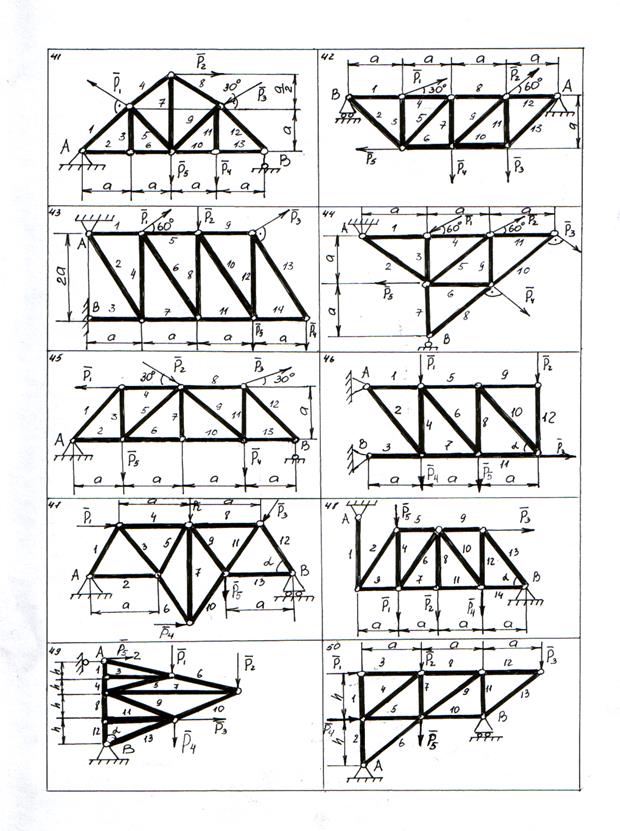
Рисунок 31
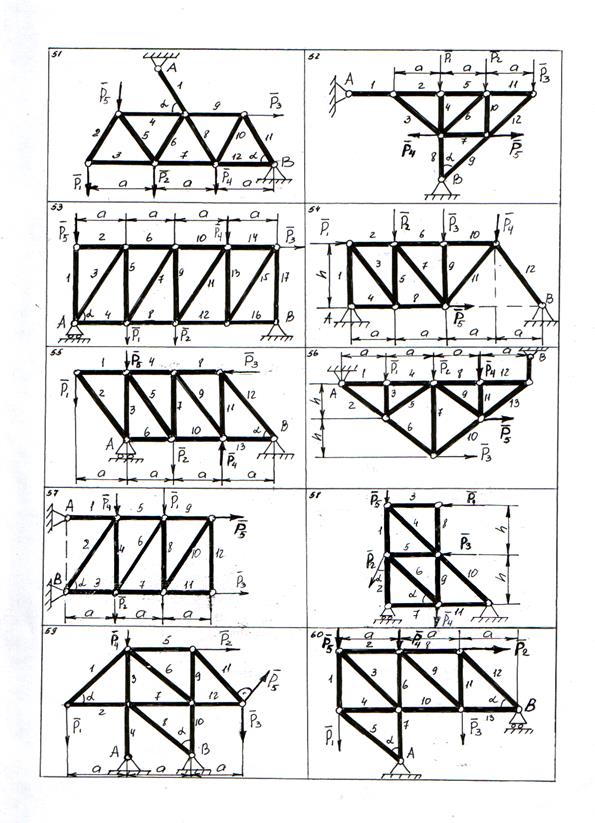
Рисунок 32
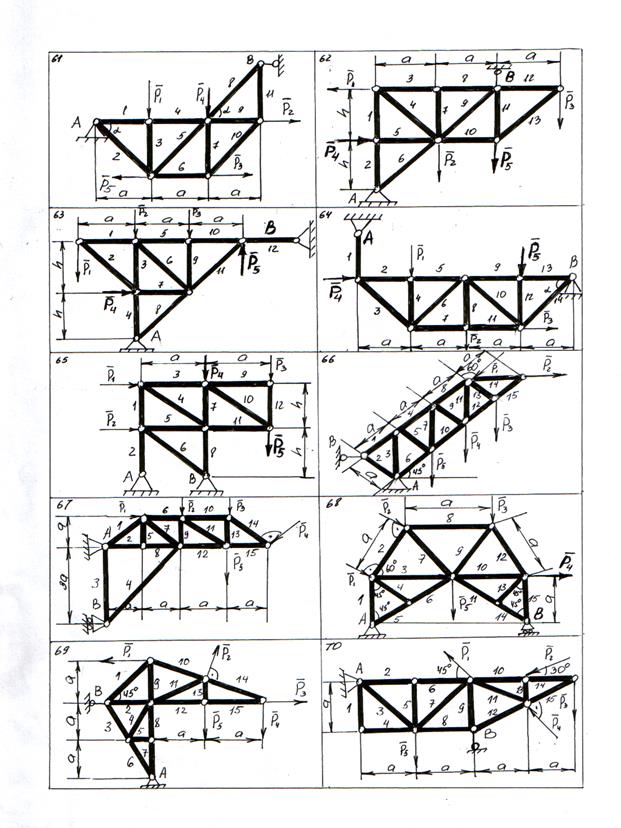
Рисунок 33
Вопросы для самопроверки:
1. Что такое ферма?
2. Где используются фермы?
3. Алгоритм расчета фермы?
4. Методы расчета ферм:
а) метод вырезания узлов;
б) метод Риттера.
5. Какая зависимость существует между числом стержней и числом узлов фермы?
6. Как определяется статическая определимость фермы?
7. Уравнения равновесия плоской системы: а) сходящихся сил? б) произвольной системы сил?
8. Определение и свойства простейшей уравновешенной системы сил?
9. Определение и свойства внутренних усилий?
Задание С – 3. Определение реакции опор составной конструкции
(система двух тел)
Конструкция состоит из двух частей, соединенных шарнирно. С – промежуточный шарнир конструкции. Прямые и изогнутые балки определяют геометрический контур конструкции. Размеры указаны на рис. 38 - 47 (№ 1 – 60) – с. 50 - 59. На конструкцию действуют: сосредоточенные силы  1, 2 ; равномерно - распределенная нагрузка интенсивностью
1, 2 ; равномерно - распределенная нагрузка интенсивностью  ; пара сил с моментом М. Исходные данные для расчетов приведены в таблице.5. Весом балок пренебречь.
; пара сил с моментом М. Исходные данные для расчетов приведены в таблице.5. Весом балок пренебречь.
Определить реакции опор конструкции и реакции промежуточного шарнира С.
Таблица 5.
| № варианта | Р1, кН | Р2, кН | М, кН ∙ м | q, кН/ м |
| 1 | 2 | 3 | 4 | 5 |
| 1 | 5 | - | 24,0 | 0,8 |
| 2 | 6,0 | 10,0 | 22,0 | 1,0 |
| 3 | 7,0 | 9,0 | 20,0 | 1,2 |
| 4 | 8,0 | - | 18,0 | 1,4 |
| 5 | 9,0 | - | 16,0 | 1,6 |
| 6 | 10,0 | 8,0 | 25,0 | 1,8 |
| 7 | 11,0 | 7,0 | 20,0 | 2,0 |
| 8 | 12,0 | 6,0 | 15,0 | 2,2 |
| 9 | 13,0 | - | 10,0 | 2,4` |
| 10 | 14,0 | - | 12,0 | 2,6 |
| 11 | 15,0 | 5,0 | 14,0 | 2,8 |
| 12 | 12,0 | 4,0 | 16,0 | 3,0 |
| 13 | 9,0 | 6,0 | 18,0 | 3,2 |
| 14 | 6,0 | - | 20,0 | 3,4 |
| 15 | 5,0 | 8,0 | 22,0 | 3,6 |
| 16 | 7,0 | 10,0 | 14,0 | 3,8 |
| 17 | 9,0 | 12,0 | 26,0 | 4,0 |
| 18 | 11,0 | 10,0 | 18,0 | 3,5 |
| 19 | 13,0 | 9,0 | 30,0 | 3,0 |
| 20 | 15,0 | 8,0 | 25,0 | 2,5 |
| 21 | 10,0 | 7,00 | 20,0 | 2,0 |
| 22 | 5,0 | 6,0 | 15,0 | 1,5 |
| 23 | 8,0 | 5,0 | 10,0 | 1,4 |
| 24 | 11,0 | 4,0 | 5,0 | 1,3 |
| 25 | 14,0 | 6,0 | 7,0 | 1,2 |
| 26 | 12,0 | 8,0 | 9,0 | 1,1 |
| 27 | 10,0 | 7,0 | 11,0 | 1,0 |
| 28 | 8,0 | 9,0 | 13,0 | 1,2 |
| 29 | 6,0 | 10,0 | 15,0 | 1,4 |
| 30 | 10,0 | 12,0 | 17,0 | 1,6 |
| 31 | 15,0 | 14,0 | 10,0 | 3 |
| 32 | 13,0 | 12,0 | 6,0 | 2 |
| 33 | 11,0 | 10,0 | 5,0 | 1,0 |
| 34 | 9,0 | 8,0 | 14,0 | 3,0 |
| 35 | 7,0 | 6,0 | 12,0 | 2,0 |
| 36 | 8,0 | 5,0 | 4,0 | 1,0 |
| 37 | 7,0 | 4,0 | 10,0 | 2,0 |
| 38 | 6,0 | 6,0 | 7,0 | 1,0 |
| 39 | 5,0 | 8,0 | 8,0 | 3,0 |
| 40 | 4,0 | 10,0 | 6,0 | 2,0 |
| 41 | 12,0 | 11,0 | 12,0 | 1,0 |
| 42 | 10,0 | 6,0 | 10,0 | 2,0 |
| 43 | 9,0 | 5,0 | 6,0 | 1,0 |
| 44 | 7,0 | 10,0 | 13,0 | 2,0 |
| 45 | 6,0 | 8,0 | 5,0 | 1,0 |
| 46 | 3,0 | 10,0 | 10,0 | 2,0 |
| 47 | 1,0 | 8,0 | 8,0 | 1,0 |
| 48 | 3,0 | 6,0 | 6,0 | 3,0 |
| 49 | 5,0 | 4,0 | 7,0 | 2,0 |
| 50 | 7,0 | 2,0 | 5,0 | 1,0 |
| 51 | 10,0 | 9,0 | 4,0 | 2,0 |
| 52 | 8,0 | 7,0 | 7,0 | 1,0 |
| 53 | 6,0 | 5,0 | 8,0 | 2,0 |
| 54 | 4,0 | 3,0 | 3,0 | 1,0 |
| 55 | 2,0 | 1,0 | 2,0 | 2,0 |
| 56 | 7,0 | 1,0 | 7,0 | 2,0 |
| 57 | 6,0 | 2,0 | 5,0 | 1,0 |
| 58 | 5,0 | 3,0 | 10,0 | 2,0 |
| 59 | 4,0 | 4,0 | 5,0 | 1,0 |
| 60 | 3,0 | 5,0 | 10,0 | 2,0 |
Пример выполнения задания: На конструкцию (рис. 34), состоящую из балок АС и СВ действует сосредоточенная сила 1, равномерно – распределённая нагрузка интенсивностью ;, пара сил с моментом М.
Дано: Р1 = 2 кН; q = 2 кН/м; М = 6 кН∙м; α = 600; Определить реакции опор А и В и реакции промежуточного шарнира С.

Рисунок 34
Решение: 1- й способ: Рассмотрим равновесие всей конструкции (рис. 35) Равномерно – распределённую нагрузку интенсивностью q заменяем равнодействующей  , численно равной Q = 6 ∙q = 6 ∙ 2 = 12 [м ∙ (кН/м)] = кН и приложенной в центре тяжести прямоугольника – на пересечении диагоналей. Вводим систему отчёта ХАУ.
, численно равной Q = 6 ∙q = 6 ∙ 2 = 12 [м ∙ (кН/м)] = кН и приложенной в центре тяжести прямоугольника – на пересечении диагоналей. Вводим систему отчёта ХАУ.
Сосредоточенную силу 1 разлагаем по правилу параллелограмма на две составляющие по осям Х и У – 1хи 1у, численно равные:
P1х = P1 ∙ cos600 =2 ∙ (½) = 1 кН
P1у = P1 ∙ sin600 = 2 ∙ ( / 2) = = 1,73 кН.
/ 2) = = 1,73 кН.
Применяя принцип освобождаемости от связей отбрасываем опору А (жесткая заделка) и опору В (невесомый стержень) и заменяем их реакциями опор (рис. №2). Реакции опоры А –  А,
А,  А, Ма; реакция опоры В – В (направлена вдоль стержня). Рассмотрим систему уравновешивающихся сил, приложенных к конструкции.
А, Ма; реакция опоры В – В (направлена вдоль стержня). Рассмотрим систему уравновешивающихся сил, приложенных к конструкции.
Для полученной плоской произвольной системы сил (рис. 35) можно составить три уравнения равновесия:
∑ Fкх = 0; Xв + Xа – P1х = 0; (1)
∑ Fку = 0; Yа – Q – P1у = 0; (2) => Yа = Q + P1у = 12 + = 13,73 kH;
∑ Mа ( к) = 0; Ma +М – 5Q – 8P1у + 2P1х = 0; (3)
к) = 0; Ma +М – 5Q – 8P1у + 2P1х = 0; (3)
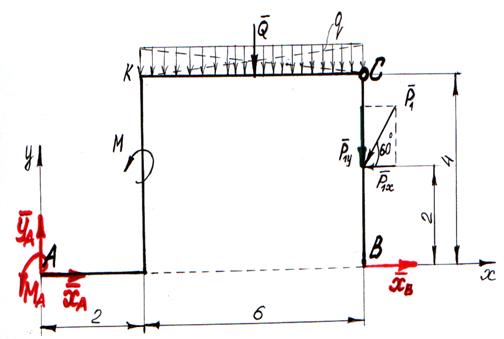
Рисунок 35
Из 3) => Ma = – M + 5Q + 8P1у – 2P1х = – 6 + 5 ∙ 12 + 8 ∙ – 2 ∙ 1 = 65,84 kH ∙ м.
 Расчленяем конструкцию на две составные части в точке подвижного соединения – шарнир С – и рассматриваем равновесие правой от шарнира С части конструкции (рис. 36). Реакцию шарнира С разлагаем на две составляющие – с, с. Эти реактивные силы отражают действие отброшенной левой части конструкции на рассматриваемую правую. Для полученной плоской произвольной системы сил (рис. 36) можно составить 3 уравнения равновесия:
Расчленяем конструкцию на две составные части в точке подвижного соединения – шарнир С – и рассматриваем равновесие правой от шарнира С части конструкции (рис. 36). Реакцию шарнира С разлагаем на две составляющие – с, с. Эти реактивные силы отражают действие отброшенной левой части конструкции на рассматриваемую правую. Для полученной плоской произвольной системы сил (рис. 36) можно составить 3 уравнения равновесия:
∑ Fkx = 0; Xв + Xс – P1х = 0; (4)
∑ Fky = 0; Yс – P1у = 0; => Yс = P1у = kH; (5)
∑ Mc ( к) = 0; – 2P1х + 4Xв = 0 (6) =>
=> Xв = (2P1х ) / 4 = P1х / 2 = 1/2 = 0,5 kH;
Рисунок 36
Зная Хв из уравнения 4) находим Хс: Хс = Р1х – Хв = 1 – 0,5 = 0,5 kH;
Подставляем найденную Хв в уравнение 1) и определяем Ха: Ха = Р1х – Хв = 1 – 0,5 = 0,5 kH;
Выполним проверку правильности вычисления реакций опор.
∑ Мк ( к) = 0; – (рис. 35)
–2Уа + Ма + 4Ха + М – 3Q – 6P1у – 2P1х + 4Xв = 0
–2 ∙ 13, 73 + 65,84 + 4 ∙ 0,5 + 6 – 3 ∙ 12 – 6 ∙ 1,73 – 2 ∙ 1 + 4 ∙ 05 = 0
–27,46 + 65,84 + 2 + 6 –36 – 10,38 – 2 + 2 = 0
–73,84 + 73,84 = 0; 0 ≡ 0
Второй способ решения: Расчленяем конструкцию на две составные части в точке подвижного соединения – шарнир С – и рассматриваем равновесие каждой (левой и правой) части конструкции отдельно. Рассмотрим равновесие левой от шарнира С – АС – части конструкции - (рис. 37). Реакцию шарнира С (действие отброшенной правой части на левую) разлагаем на две составляющие 'с, 'с. Причём 'с = – с, 'с = – с. Для полученной плоской произвольной системы сил можно составить три уравнения равновесия:
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1485; Нарушение авторских прав?; Мы поможем в написании вашей работы!