КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порядок выполнения работы. Приборы и оборудование
|
|
|
|
Приборы и оборудование
Программа работы
Цель работы
Лабораторная работа №3
Контрольные вопросы
6.1 Какой из видов торможения ДПТ наиболее оптимален в энергетическом отношении, какой наименее оптимален?
6.2 Какой вид торможения обеспечивает точную остановку электропривода с реактивным статическим моментом на валу?
6.3 Возможно ли динамическое торможение ДПТ параллельного возбуждения и если да, то эффективно ли оно?
6.4 Для каких режимов торможения понятие КПД неприменимо?
Федеральное агентство по образованию
ФГОУ СПО «Астраханский колледж вычислительной техники»
Специальность 140613
Исследование асинхронного электродвигателя
с короткозамкнутым ротором
по дисциплине “Электрический привод”
АКВТ.140613.ЛР42.0003
| Листов | 6 |
| Составил преподаватель | В.В. Ветлугин | ||
| Рассмотрено на заседании цикловой комиссии специальности 140613 Техническая эксплуатация и обслуживание электрического и электромеханического оборудования в нефтяной и газовой промышленности | ||||||||||
| Протокол № | от | “ | ” | г. | ||||||
| и рекомендовано для студентов | ||||||||||
| Председатель цикловой комиссии | С.В. Расторгуева | |
Содержание
| 1 Цель работы | |
| 2 Программа работы | |
| 3 Приборы и оборудование | |
| 4 Порядок выполнения работы | |
| 5 Содержание отчёта | |
| 6 Контрольные вопросы |
1.1 Исследование рабочих свойств асинхронного двигателя
2.1 Изучить схему для исследования асинхронного электродвигателя постоянного с короткозамкнутым ротором (в дальнейшем изложении АД)
|
|
|
2.2 Снять механическую и электромеханическую характеристики двигателя
2.3 Построить зависимость η, cosφ = f(M)
2.4 Построить энергетические диаграммы двигателя для нескольких режимов работы
2.5 Провести обработку экспериментальных данных, составить отчет и сделать заключение по работы
В лабораторной работе используются следующие модули:
- модуль питания стенда (МПС);
- модуль питания (МП);
- силовой модуль (СМ);
- модуль тиристорного преобразователя (ТП);
- модуль измерителя мощности (МИМ);
- модуль ввода/вывода (МВВ);
- модуль измерительный (МИ).
4.1 Перед проведением лабораторной работы необходимо привести модули в исходное состояние:
- переключатель «Сеть» тиристорного преобразователя перевести в нижнее положение, переключатель SA3 – в положение «Руч», SA4 – в положение «НМ», SA6 «Разрешение» - в нижнее положение;
- переключатель SA1 модуля МДС2 установить в положение «∞».
4.2 Исследуемый асинхронный двигатель входит в состав электромашинного агрегата, включающего в себя собственно исследуемый двигатель М1, нагрузочный генератор – машину постоянного тока – М2, импульсный датчик частоты вращения – М3.
Для проведения работы на персональном компьютере должно быть загружено ПО Labdrive и выбрана соответствующая работа. Описание программного обеспечения Labdrive и LabShow приведено в приложениях Д, Е.
Схема для исследования асинхронного электродвигателя представлена на
рисунке 1.
Асинхронный двигатель, исследуемый в данной работе, подключается к выходам
3х380 В модуля питания через измеритель мощности и датчики тока и напряжения.
Выходы датчиков тока и напряжения, а также выход ПЧН подключаются к входам А1, А2, А3 модуля ввода/вывода.
Выход датчика тока якоря тиристорного преобразователя соединяется с входом А4 модуля ввода/вывода.
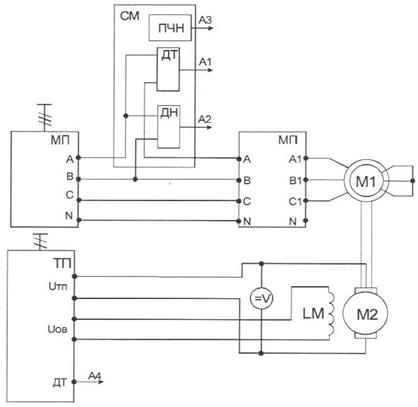
Рисунок 1 – Схема для исследования асинхронного электродвигателя
|
|
|
В качестве нагрузочной машины выступает двигатель постоянного тока, подключенный к тиристорному преобразователю (ТП). Перед началом работы ТП должен быть переведен в режим регулирования момента (Приложение Б).
4.3 Механическая и электромеханическая характеристики двигателя
Механическая характеристика представляет собой зависимость частоты вращения двигателя от полезного момента на валу двигателя ω = f(MB).
Электромеханическая характеристика двигателя представляет собой зависимость частоты вращения от тока статора ω = f(IC).
Опыт проводится в следующей последовательности:
- включить автоматические выключатели QF1, QF2 – подается напряжение на асинхронный двигатель;
- подать питание на ТП включением кнопки «Сеть»;
- подать разрешение на работу ТП (SA6) и выбрать направление вращения ДПТ (переключатель SA5);
- задавая момент нагрузки, следить за частотой вращения. Если она увеличивается, поменять направление момента нагрузки;
- снять несколько точек двигательного режима, поменять направление момента (переключатель SA5 ТП), снять несколько точек генераторного режима. При проведении опыта следить за током якоря ДПТ. Он не должен превышать 1,5 А.
Данные опыта занести в таблицу 1.
Таблица 1 – Данные опыта
| n, об/мин | |||||
| UФ, В | |||||
| IC, A | |||||
| PC, Вт | |||||
| ω, 1/с | |||||
| S, B·A | |||||
| cos(φ) | |||||
| ∆РЭЛ, Вт | |||||
| ∆РМЕХ, Вт | |||||
| РВ, Вт | |||||
| МВ, Н·м | |||||
| η |
После проведения опыта необходимо привести модули в исходное состояние.
Расчетные данные.
Частота вращения двигателя, 1/с:

Полная мощность, потребляемая из сети, В·А:
S=3·UФ·IC.
Cosφ электродвигателя:
 ,
,
где PC – активная мощность, потребляемая из сети, Вт.
Электрические потери в цепи статора, Вт:
∆РЭЛ= 3·IС2·rС,
где rС – сопротивление фазы обмотки статора (Приложение В).
Полезная мощность на валу двигателя, Вт:
РВ= РС - ∆РЭЛ - ∆РМЕХАД,
где ∆РМЕХАД – механические потери двигателя (Приложение В), Вт.
Момент на валу двигателя, Н·м:
|
|
|

Коэффициент полезного действия в двигательном режиме электродвигателя: 
Коэффициент полезного действия в генераторном режиме: 
По данным опытов построить механическую, электромеханическую характеристику, а также зависимости η, cosφ = f(MB).
4.4 Энергетические диаграммы
В лабораторной работе необходимо построить диаграммы для двигательного, генераторного режимов, а также для режима холостого и идеального холостого хода. Результаты расчета для конкретной точки привести в таблице 2.
Таблица 2 – Результирующая таблица
| ω, 1/с | МВ, Н·м | PC, Вт | ∆РЭЛ, Вт | ∆РМЕХ, Вт | РВ, Вт |
5 Содержание отчёта
5.1 Цель работы
5.2 Программа работы
5.3 Приборы и оборудование
5.4 Ход работы
5.5 Выводы
5.6 Контрольные вопросы
|
|
|
|
|
Дата добавления: 2015-06-28; Просмотров: 587; Нарушение авторских прав?; Мы поможем в написании вашей работы!