КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Графический метод решения задач
|
|
|
|
Задача № 1.1.1.
 |
f = – х 1 + 5 х 2 ¾> min;
4 х 1+ 3 х 2 £ 24,
х 1– 10 х 2 £ 0, 
8 х 1– 3 х 2 ³ 0,
5 х 1+ 3 х 2 ³ 15,
х 1³0, х 2³ 0. (1)
Совокупность переменных хj, удовлетворяющих условию (1), называется областью допустимых решений. Допустимое решение, обращающее целевую функцию в min или max, называется оптимальным. Для его определения необходимо построить область допустимых решений (область определения). Так как в условии задачи заданы две переменные, то область допустимых решений находится на плоскости х 10 х 2. Каждое неравенство (1) определяет полуплоскость, а равенство – прямую. Для построения полуплоскости необходимо найти ее границу и установить, с какой стороны от нее лежит искомая полуплоскость. Перепишем условия (1) в виде равенств (2) и пронумеруем их.
| 4 х 1+ 3 х 2 | = | 24 (I), | |
| х 1– 10 х 2 | = | 0 (II), | |
| 8 х 1– 3 х 2 | = | 0 (III), | |
| 5 х 1+ 3 х 2 | = | 15 (IV). | (2) |
Введем систему координат х 10 х 2 и построим последовательно эти прямые – границы полуплоскостей. Для построения прямой на плоскости необходимо определить любые две точки, лежащие на этой прямой. Если прямая пересекает оси 0 х 1и 0 х 2, то можно найти координаты точек ее пересечения с осями координат. Определим координаты пересечения прямой (I) с осью 0 х 1: х 1=0; Þ 3 х 2= 24; Þ х 2= 8. Соответственно определим координаты второй точки пересечения первой прямой с осью 0 х 2: х 2=0; Þ 4 х 1= 24; Þ х 1= 6. Следовательно, точки пересечения прямой (I) с осями координат равны (0,8) и (6,0). Построим эту прямую (рис. 1).
Определим полуплоскость. Для этого подставим в первое неравенство (1) координаты любой точки, не лежащей на данной прямой, например (0,0). Тогда из первого условия следует: 4×0+3×0 £24, значит, неравенство справедливо, откуда следует, что полуплоскость лежит с той стороны прямой, где находится точка с координатами (0,0).
 |
Рис. 1
Обозначим данную полуплоскость штриховыми линиями и укажем расположение ее относительно прямой стрелками (рис. 2).
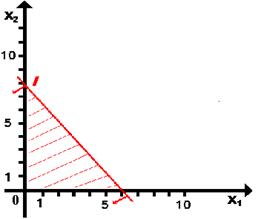 |
Рис. 2
Аналогичным образом строятся и другие полуплоскости. Необходимо учесть, что прямые (II) и (III) проходят через начало координат, т.е. точку (0,0). Координаты второй точки желательно брать пропорционально коэффициентам в уравнении искомой прямой. Например, для второй прямой – точки (0,0) и (10,1), а для третьей – (0,0) и (3,8). После построения всех полуплоскостей область допустимых решений примет следующий вид (рис. 3):
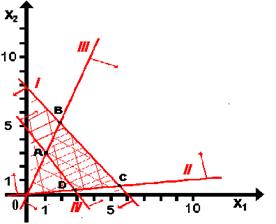 |
Рис. 3
Область допустимых решений представлена в виде выпуклого многоугольника ABCD. Следующий этап в решении задачи – построение целевой функции:
| f = – х 1+ 5 х 2 ¾> min. |
Целевая функция f определяет на плоскости прямую, которая должна проходить через точку или сторону многоугольника и иметь наименьшее значение. Построим направляющий вектор для этой прямой. Данный вектор перпендикулярен искомой прямой, и его направление всегда определяет максимум целевой функции. Противоположное направление вектора определяет минимум. Обозначим этот вектор через  . Он проходит через точку (0,0) и (–1,5). Координаты второй точки берут из коэффициентов целевой функции и с их помощью определяют направление вектора . Перпендикулярно ему построим прямую – х 1+ 5 х 2=0. Как было сказано выше, вектор всегда показывает направление возрастания значения целевой функции (max), противоположный ему вектор – – направление убывания значения целевой функции (min). Перемещаем прямую – х 1+5 х 2=0 по области определения параллельно самой себе в направлении min. Целевая функция f достигнет своего минимального значения в точке С (рис. 4).
. Он проходит через точку (0,0) и (–1,5). Координаты второй точки берут из коэффициентов целевой функции и с их помощью определяют направление вектора . Перпендикулярно ему построим прямую – х 1+ 5 х 2=0. Как было сказано выше, вектор всегда показывает направление возрастания значения целевой функции (max), противоположный ему вектор – – направление убывания значения целевой функции (min). Перемещаем прямую – х 1+5 х 2=0 по области определения параллельно самой себе в направлении min. Целевая функция f достигнет своего минимального значения в точке С (рис. 4).
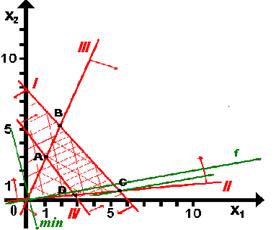 |
Рис. 4
Оптимальному решению задачи (1) соответствует точка С, которая лежит на пересечении прямых (I) и (II):
4 х 1+ 3 х 2= 24;
х 1– 10 х 2= 0.
Для решения данной системы уравнений умножить второе уравнение на 4 и сложить соответственно по элементам с 1-м уравнением:
4 х 1+ 3 х 2 = 24;
4 х 1– 40 х 2 = 0.
Вычтем из первого уравнения второе, получим: 43х2= 24 Þ х 2= 0,56.
Подставив найденное значение х 2во второе уравнение, получим:
х 1= 10 х 2Þ х 1=5,6. Подставив координаты точки С в целевую функцию, получим следующий результат:
f min = – 5,6 + 5×0,56 = – 2,8.
Окончательный результат задачи запишем в следующем виде:
х 1= 5,6, х 2= 0,56; f min = – 2,8.
Решение данного примера на ПЭВМ осуществляется программным комплексом «Блок-3». С его помощью производятся ввод, решение и вывод результативной информации на внешний носитель. Простота и доступность комплекса позволит без труда освоить его и применять на практике.
Задача № 1.1.2.
 f = 2 х 1+ 3 х 2 ¾> max;
f = 2 х 1+ 3 х 2 ¾> max;
2 х 1+ 3 х 2 £ 12,
2 х 1– 5 х 2 £ 0,
7 х 1– 2х2³ 0,
х 1, х 2³ 0. (3)
Определения и построение области допустимых решений аналогичны заданию 1.1.1. Окончательный вид области допустимых решений представлен на рис. 5 многоугольником АВС (точка А совпадает с точкой 0).
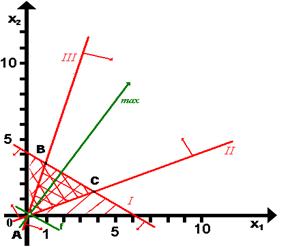
Рис. 5
Очевидно, что прямая, определяющая целевую функцию, совпадает с прямой, образующей сторону многоугольника ВС. Отсюда следует, что решением данной ЭММ являются точки, лежащие на стороне ВС много-
угольника АВС. Для записи решения ЭММ необходимо найти координату x 1 B – точки В и x 1 C – точки С. Определив их, мы сможем найти отрезок, лежащий на оси 0 x 1(рис. 6).
 |
Рис. 6
Координаты точки В – x1 B определяются в результате пересечения прямых 2 х 1+ 3 х 2 = 12 и 7 х 1– 2 х 2 = 0. Для этого необходимо решить систему уравнений:
2 х 1+ 3 х 2= 12 ´ 2 Þ 4 х 1+ 6 х 2= 24;
7 х 1– 2 х 2= 0 ´ 3 Þ 21 х 1– 6х2= 0.
Сложив два последних уравнения, получим: 25 х 1=24, х 1=0,96. Из этого следует, что x 1 B =0,96. Координата точки С – x 1 C определяется в результате пересечения прямых 2 х 1+ 3 х 2=12 и 2 х 1–5 х 2=0. Решим систему уравнений:
2 х 1+ 3 х 2= 12 ´ 5 Þ 10 х 1+ 15 х 2= 60;
2 х 1– 5 х 2= 0 ´ 3 Þ 6 х 1 – 15 х 2= 0.
Сложив два последних уравнения, получим: 16 х 1= 60, х 1= 3,75, откуда следует, что x 1 C = 3,75.
Значение целевой функции для данной ЭММ равно 12 (так как уравнение прямой, на которой определен отрезок ВС – 2 х 1+3 х 2= 12).
Таким образом, ответ данной задачи:
x 1Î[ x 1 B; x 1 C ] Þ x 1Î[0,96; 3,75];
2 х 1+ 3 х 2=12 Þ 3 х 2= 12 – 2 х 1Þ х 2= (12 – 2 х 1)/3.
Полный ответ данного примера запишется в следующем виде:
x 1Î[0,96; 3,75]; x 2= (12 – 2 х 1)/3; f max = 12.
Задача № 1.1.3.
 f = 2 х 1+ 3 х 2 ¾> max;
f = 2 х 1+ 3 х 2 ¾> max;
2 х 1+ 3 х 2 ³ 12,
2 х 1– 5 х 2 £ 0,
7 х 1– 2 х 2³ 0,
х 1, х 2 ³0. (4)
Используя схему построения области допустимых решений задач 1.1.1–1.1.2, получим следующий график (рис. 7):
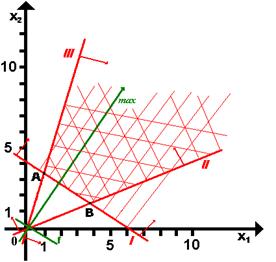 |
Рис. 7
Из графика видно, что для данной ЭММ задачи ЛП оптимального решения нет, так как область допустимых решений в направлении целевой функции неограничена.
Ответ: нет оптимального решения.
Задача № 1.1.4.
 |
f = 2 х 1+ 3 х 2 ¾> max;
х 1+ х2 £ 2,
2 х 1+ 3 х 2³ 12,
2 х 1– 5 х 2£ 0,
7 х 1– 2 х 2³ 0,
х 1, х 2³ 0. (5)
Используя график задачи 1.1.3 и достроив первую полуплоскость х 1+х2£ 2, получим область определения, показанную на рис. 8.
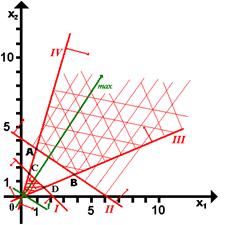 |
Рис. 8
Из графика (рис. 8) видно, что для данной ЭММ области допустимых решений нет. Ответ: нет области допустимых решений.
Задача № 1.1.5.
 f = – х 1+ 5 х 2 ¾> min;
f = – х 1+ 5 х 2 ¾> min;
10 х 1+ 3 х 2£ 30,
10 х 1+ 5 х 2³ 50,
2 х 1– 6 х 2£ 0,
х 1, х 2³ 0. (6)
Область определения ЭММ (6) представлена на рис. 9. Из анализа графика следует, что областью допустимых решений будет являться точка А с координатами (0,10) (10 х 1+ 5 х 2= 50, х 1= 0, 5 х 2= 50, х 2=10). В случае, когда решением ЭММ является единственная точка, целевую функцию можно не строить.
Ответ: x 1= 0; x 2=10; fmin = 0+5×10 = 50.
 |
Рис. 9
Таким образом, при решении задач ЭММ ЛП возможны следующие ситуации:
– задача имеет одно оптимальное решение;
– задача имеет бесконечное число оптимальных решений;
– задача не имеет оптимального решения;
– задача не имеет области допустимых решений.
На практике ЭММ ЛП не имеет решений только в том случае, если некорректна постановка задачи.
Как показывает опыт разработки ЭММ, основная сложность состоит в описании экономико-технологических процессов в модели и выборе критерия оптимизации. Отсюда следует, что необходимо точно определить нормативные параметры. Это в свою очередь требует поставленного учета и анализа на исследуемом объекте. В то же время особое значение в составлении модели приобретает уровень подготовки специалиста. От его умения выявить основные звенья технологического процесса, определить этапы решения задачи и сформулировать цели исследования будет зависеть и качество решения данной проблемы.
Задача № 1.1.6.
Предприятие может организовать производство своей продукции двумя способами. При первом способе предприятие за месяц выпускает C 1 тыс. изделий, при втором – C 2 тыс. изделий. Расход производственных, людских ресурсов, амортизация оборудования и ограничения ресурсов, приведены ниже в таблице.
Сколько месяцев должно работать предприятие, каким способом организовать производство, чтобы обеспечить максимальный выпуск продукции.
1) Решить графическим способом;
2) Решить на базе комплекса «Блок-3»;
3) Симплекс-методом.
Таблица 1
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1555; Нарушение авторских прав?; Мы поможем в написании вашей работы!