КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
P.S. Не забудьте прихватить с собой небольшой сувенирчик. Будем обмениваться подарками. 1 страница
|
|
|
|
10. Отечественные теории этноса.
Cosx
НЕ
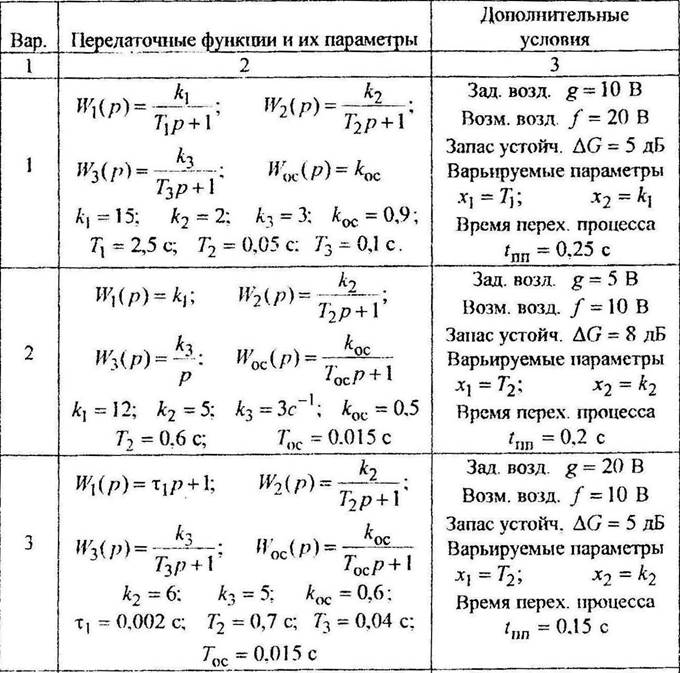
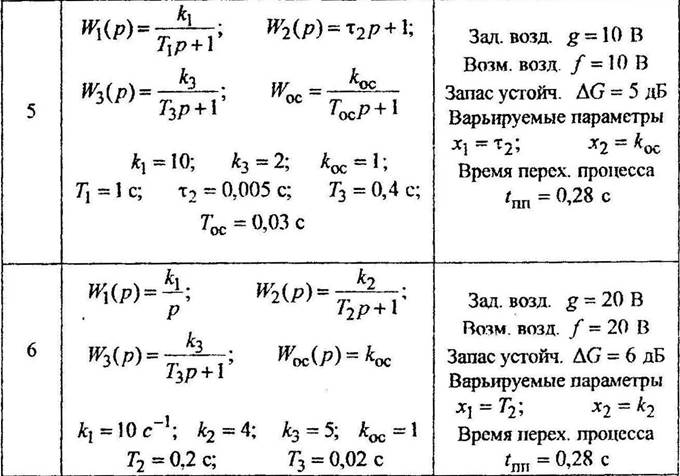
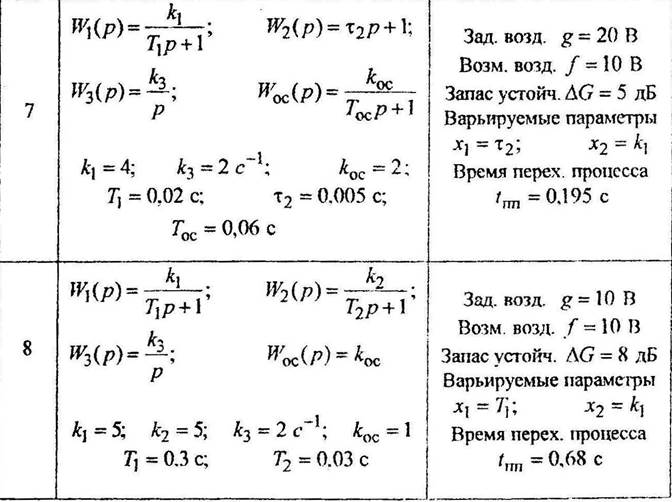
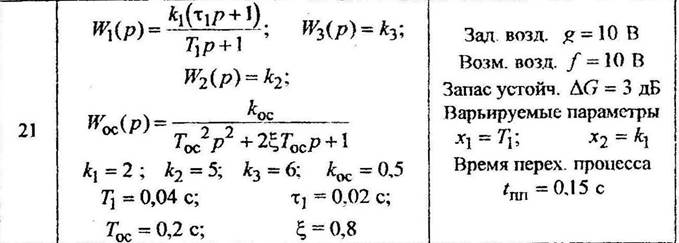
Исходные данные к курсовой работе
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
J
Г
..
..
..
..
..
..
..
|
|
|
|
|
|


|

|
|

|
|
| ИЯ |

|
|
|
|
|
|
1) Дьяконов В.П. Система Mathcad: Справочник.- М.: Радио и связь, 1993.- 128 с.
2) Макаров И.М., Менский Б.М. Линейные автоматические системы. М.: Машиностроение, 1982,- 504 с.
3) Попов Е.П. Теория линейных систем автоматизированного управления и регулирования – М.: Наука, ГРФМЛ, 1989.- 304 с.
4) Очков В.Ф. Mathcad Plus 6.0 для студентов и инженеров.- М.: Компьютер Пресс, 1996. – 238 с.
5) Лебедев Ю.М. Теория автоматического управления. Система Mathcad и ее применение для расчетов. – Томск, 1996. – 71 с.
Приложение 1
Таблица П1
 |
Продолжение таблицы П1
 |
Продолжение таблицы П1
 |
 |
Продолжение таблицы П1
 |
Продолжение таблицы П1
 |
Продолжение таблицы П1
 |
Продолжение таблицы П1
 |
Продолжение таблицы П1
 |
}dx.
Энергия же изгиба есть
к"Е г I &1 \2 Fmn = 2nR sin a 24(j_p.2) J [jtf) dx.
 Варьируя сумму FBa = + ^"апл п0 £> получим уравнение
Варьируя сумму FBa = + ^"апл п0 £> получим уравнение
| dx* |
d%, 12(1—о2)
-1 = 0.
PR*
При х -+ оо £ должно стремиться к нулю, а при х = 0 должны выполняться граничные условия равенства нулю момента сил: £"= О, и условие равенства развивающейся при изгиСэ силы нормальной к поверхности оболочки компоненте силы тяжести:
2nR sin а ■
■h3E
12(1 — о2)
■ = Q cos а.
| • cos хх, |
Удовлетворяющее этим условиям решение есть
1 = Ае~КХ-
где
_ [ 3(1 — а2) ] 1/4 „ Qctgoc f 3/?2 (1 —а2) 1'
* ~ L h*R* J ' Л~ й [ 8лА2 J Величина прогиба оболочки есть
d = £ (0) cos а = A cosa.
§ 16. Кручение стержней
Перейдем теперь к изучению деформаций тонких стержней. Этот случай отличается от всех ранее рассматривавшихся тем, что вектор смещения п может быть большим даже при слабой деформации, т. е. при малом тензоре uih 1). Так, при слабом сгибании тонкого длинного стержня его концы могут значительно переместиться в пространстве, даже если относительные смещения соседних точек в стержне малы.
Существует два типа деформаций стержней, могущих сопровождаться большим смещением отдельных частей стержня. Одним из них является изгиб стержня, а вторым — его кручение. С рассмотрения этого второго случая мы и начнем.
| 1) Исключением является только простое растяжение стержня без изменения его формы, — при слабом растяжении наряду с тензором всегда мал также в вектор н. |
Деформация кручения заключается в том, что в стержне, остающемся при этом прямым, каждое поперечное сечение поворачивается относительно ниже лежащих на некоторый угол.
Если стержень длинный, то при слабом кручении достаточно удаленные друг от друга сечения могут повернуться на большой угол. Образующие боковой поверхности стержня, параллельные его оси, приобретают при кручении винтовую форму.
Рассмотрим тонкий прямой стержень произвольного сечения. Выберем систему координат с осью z вдоль оси стержня и началом координат где-нибудь внутри него. Введем угол кручения т как угол поворота, отнесенный к единице длины стержня. Это значит, что два бесконечно близких поперечных сече.ния, находящихся на расстоянии dz, поворачиваются друг относительно друга на угол d<p = т dz (так что т = dqldz). Сама деформация кручения, т. е. относительные смещения соседних частей стержня, предполагаются малыми. Условием этого является малость относительного поворота сечений, удаленных вдоль длины стержня на расстояния порядка его поперечных размеров R, т. е.
<гЯ«1. (16,1)
Рассмотрим небольшую область длины стержня вблизи начала координат и определим смещения и точек стержня в этой области. В качестве несмещенного выберем поперечное сечение стержня в координатной плоскости х, у. Как известно, при повороте радиус-вектора г на малый угол бф смещение его конца определяется формулой
Ьг = lfi?r], (16,2)
где бф — вектор с абсолютной величиной, равной углу поворота, направленный вдоль оси, вокруг которой производится поворот. В нашем случае поворот производится вокруг оси г, причем для точек с координатой z угол поворота относительно плоскости х, у равен xz (угол т в области вблизи начала координат можно рассматривать как постоянный). Формула (16,2) дает теперь для компонент ах, иу вектора смещения
их = —xzy, иу = xzx. (16,3)
При кручении стержня его точки испытывают, вообще говоря, также и смещение вдоль оси г. Поскольку при т = 0 это смещение отсутствует, то при малых т его можно считать пропорциональным т. Таким образом,
uz = тф (х, у), (16,4)
где[(1р (х, у) — некоторая функция от х и у, называемая функцией кручения. В результате описываемой формулами (16,3) и (16,4) деформации каждое поперечное сечение стержня поворачивается вокруг оси z, одновременно искривляясь, переставая быть плоским. Следует заметить, что, выбрав определенным образом начало координат в плоскости х, у, мы тем самым «закрепляем» определенную точку сечения стержня так, что она не смещается в этой плоскости {смещаясь, однако, вдоль оси z); изменение выбора начала координат не отразилось бы, разумеется, на самой деформации кручения, приведя лишь к несущественному общему смещению стержня как целого.
Зная и, можно найти компоненты тензора деформации. Поскольку и в рассматриваемой области мало, то можно воспользоваться формулой uih = -i- (-J^+ • В результате находим
"жж = Uyy = UXy = игг = о,
"~=-И"!?- =i~(w+x)' (16'5)
Обращаем внимание на то, что иц = 0; другими словами, кручение не сопровождается изменением объема, т. е. представляет собой деформацию чистого сдвига.
Для компонент тензора напряжений находим
охх = Оуу = ozz = оху — 0,
ажг = 2рыжг = рт — ау1 = 2ри^ = рт + (16,6)
(здесь удобнее пользоваться модулем сдвига р, вместо Е и о). Поскольку отличны от нуля только oxz и оуг, то общие уравнения равновесия doih/dxh = 0 сводятся к уравнению
Подставив сюда (16,6), мы найдем, что функция кручения должна удовлетворять уравнению
Аг|) = 0, (16,8)
где А — двухмерный оператор Лапласа.
Несколько более удобно, однако, пользоваться другой вспомогательной функцией х (х, у), определяемой равенствами
oxz = 2рт oyz = - 2рт ||; (16,9)
для этой функции получаются более удобные граничные условия на контуре сечения стержня (см. ниже). Сравнив (16,9) с (16,6), получим
Sh*+2f- ОМ?)
Дифференцируя первое равенство по у, второе по х и вычитая одно из другого, получим для функции х следующее уравнение:
Ах = -1. (16,П)
Для определения граничных условий на поверхности стержня замечаем, что благодаря малой толщине стержня действующие на его боковую поверхность внешние силы малы по сравнению с возникающими в стержне внутренними напряжениями и потому могут быть положены (при отыскании граничных условий) равными нулю. Это обстоятельство в точности аналогично тому, что мы имели при рассмотрении изгиба тонких пластинок. Таким образом, на боковой поверхности стержня должно быть oihnk = 0; поскольку ось z направлена по оси стержня, то вектор нормали г» имеет только компоненты пх, пу, так что написанное уравнение сводится к условию
Подставляя сюда (16,9), получаем
Но компоненты вектора нормали к плоскому контуру (контуру
. dy - dx
|
сечения стержня) равны пх — —пд = —ц-, где х, у— координаты точек контура, a dl — элемент дуги. Таким образом, получаем
откуда % — const, т. е. на контуре сечения функция х постоянна. Поскольку в определения (16,9) входят только производные от функции х, то ясно, что к этой функции можно прибавлять любую постоянную. Если контур сечения одно-связен, то можно, следовательно, без
всякого ограничения общности положить на нем в качестве граничного условия к уравнению (16,11) х)
X = 0. (16,12)
| *) Задача об определении деформации кручения по уравнению (16,11) с граничным условием (16,12) формально совпадает с задачей об определении формы прогиба равномерно нагруженной плоской мембраны по уравнению (14,9). Полезно заметить также гидродинамическую аналогию: уравнением вида (16,11) определяется распределение скоростей, а {х, у) вязкой жидкости по сечению трубы; граничному условию (16,12) соответствует условие v — 0 на неподвижных стенках трубы (см. VI, § 17). |
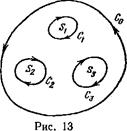
В случае же многосвязного контура % будет иметь различные постоянные значения на каждой из замкнутых кривых, составляющих контур. Поэтому положить х равным нулю можно будет лишь на одной из этих кривых, например на внешнем контуре (С0 на рис. 13). Значения же х на остальных частях контура определятся из условия, являющегося следствием однозначности смещения иг — тф (х, у) как функции координат. Именно, ввиду однозначности функции кручения \р (х, у) интеграл от ее дифференциала dip по замкнутому контуру должен быть равен нулю. С помощью соотношений (16,10) имеем поэтому
$*.-$(£л+$*)- -
или
§2Ldl = -S, (16,13)
где д%/дп есть производная функции % по направлению внешней нормали к контуру, a S — охватываемая этим контуром площадь. Применяя (16,13) к каждой из замкнутых кривых Сх, С2, мы и получим искомые условия.
Определим свободную энергию подвергнутого кручению стержня. Для энергии единицы объема имеем
F = °JfL = 0хгихг + аугиуг = ± (ah + а%) и, подставляя сюда (16,9):
^ [(*)'+(^.)'] в ^(ИЛ
где V означает двухмерный градиент. Энергия кручения, отнесенная к единице длины стержня, получится отсюда интегрированием по площади поперечного сечения, т.е. равна Ст2/2, где коэффициент С равен
C = 41xJ(vxM-
Величину С называют крутильной жесткостью стержня. Полная упругая энергия стержня равна интегралу
Fc^\-\Cx*dz, (16,14)
взятому по его длине. Написав
(VX)a = V (X VX) - X Н = V (X VX) + X и преобразуя интеграл от первого члена в интеграл по линии контура сечения стержня, получим
C = 4ji(j>x|£<M + 4!i Jxd/- (16,15)
Если контур сечения односвязен, то ввиду граничного условия X = 0 первый член исчезает и остается
C = ty\1dxdy. (16,16)
Для многосвязной же границы (рис. 13), положив % = 0 на внешнем контуре С0 и обозначив посредством Xs постоянные значения х на внутренних контурах Ch, получим с помощью (16,13)
C = 4ii2fcS» + 4|iJxd*rfj, (16,17)
к
(следует помнить, что при интегрировании в первом члене в (16,15) контур С0 обходится в прямом, а контур Ск — в обратном направлениях).
Рассмотрим наиболее обычный случай кручения, когда один из концов стержня закреплен неподвижно, а внешние силы приложены только к поверхности другого его конца. Эти силы таковы, что производят только кручение стержня без какой бы то ни было другой его деформации, например изгиба. Другими словами, они составляют некоторую пару сил, закручивающую стержень вокруг его оси. Момент этой пары обозначим посредством М.
Естественно ожидать, что в таком случае угол кручения х постоянен вдоль длины стержня. В этом можно убедиться, например, из условия минимума полной свободной энергии стержня в равновесии. Полная энергия деформированного стержня равна сумме FCT + U, где U — потенциальная энергия, обусловленная действием внешних сил. Подставляя в (16,14) х — dqldz и варьируя по углу ф, находим
или, интегрируя по частям,
- j C-jg- бф dz -f W + Стбф = 0.
В последнем члене слева берется разность значений на пределах интегрирования, т. е. на концах стержня. Один из этих концов, скажем нижний, закреплен так, что на нем бф = 0. Что касается вариации бV потенциальной энергии, то, взятая с обратным знаком, она представляет собой работу внешних сил при повороте на угол бф. Как известно из механики, работа пары сил при таком повороте равна произведению УИбф угла поворота на момент пары. Поскольку никаких других внешних сил нет, то 61/ = —Мбф, и мы получаем
jC-~b<pdz + 8q>{— М+С%) = 0. (16,18)
Во втором члене берется его значение на верхнем пределе. В интеграле по dz вариация бф произвольна, а потому должно быть С dxldz = 0, т. е.
х ~ const.
(16,19)
Таким образом, угол кручения постоянен вдоль всей длины стержня. Полный угол поворота верхнего основания относительно нижнего равен поэтому просто произведению т/ угла т на длину / стержня.
В уравнении (16,18) должен исчезнуть также и второй член. Отсюда находим следующее выражение для постоянного угла кручения:
т = М/С. (16,20)
Задачи
1. Определить крутильную жесткость стержня с круговым сечением (ра-
диуса R).
Решение. Решения задач 1—4 формально совпадают с решениями задач о движении вязкой жидкости в трубе соответствующего сечения (см. примечание на с. 89); количеству Q протекающей через сечение трубы жидкости соответствует здесь величина С.
Для стержня кругового сечения имеем (начало координат в центре сечения) 5С=1/4(/??-^-^),
Крутильная жесткость:
С = цлЯ*/2.
Для функции 1|> получаем из (16,10) i|>= const. Но постоянная тр соответствует, согласно (16,4), простому смещению стержня как целого вдоль оси г; поэтому можно считать, чтогр = 0. Таким образом, поперечные сечения кругового стержня при кручении остаются плоскими.
2. То же для стержня эллиптического сечения (полуоси а и Ь).
Решение, Крутильная жесткость:
C==JtL1 а* + Ь* •
Распределение продольных смещений дается функцией кручения:
б2 - а2
(оси координат направлены по осям эллипса).
3. То же для стержня с сечением в виде равностороннего треугольника
(длина сторон а).
Решение. Крутильная жесткость:
Функция кручения;
t = -~y(xV3 +y){xV3-у),
причем начало координат выбрано в центре треугольника, а ось х совпадает с одной из его высот.
4. То же для стержня, имеющего вид длинной тонкой пластинки (ширина d, толщина h < d).
Решение. Задача эквивалентна задаче о течении вязкой жидкости между плоскопараллельными стенками. Результат:
С = и dh3/3.
5. То же для цилиндрической трубы (внутренний и внешний радиусы Rf
Решение. Функция
x = V.
(в полярных координатах) удовлетворяет условию (16,13) на обеих границах кольцевого сечения трубы. По формуле (16,17) найдем
с =-1-й (Я!-Я!).
6. То же для тонкостенной трубы произвольного сечения.
Решение. Ввиду тонкости стенки трубы можно считать, что на протя-
жении ее ширины Л функция % меняется от нуля на одной стороне до Xi на Дру-
гой по линейному закону % — Xiljlh (У — координата вдоль толщины стенки).
Тогда условие (16,13) дает %-yLlh = S, где L — длина периметра сечения трубы,
a S — охватываемая им площадь. В выражении (16,17) второй член мал по сравне-
нию с первым, и мы получаем
С = 4hS*yJL.
Если трубу разрезать продольно по одной из ее образующих, то крутильная жесткость резко уменьшается, становясь равной (согласно результату задачи 4) С = ц/Л3/3.
§ 17, Изгиб стержней
В изогнутом стержне в некоторых местах его происходит растяжение, а в других — сжатие. Растянуты линии на выпуклой стороне изогнутого стержня, а на вогнутой стороне происходит сжатие. Как и в случае пластинок, вдоль длины стержня внутри него существует «нейтральная» поверхность, на которой не происходит ни растяжения, ни сжатия. Она отделяет собой области сжатия от областей растяжения.
Начнем с исследования деформации изгиба в небольшом участке длины стержня, в котором изгиб можно считать слабым; под слабым мы понимаем здесь изгиб, при котором мал не только тензор деформации, но и абсолютная величина смещений точек стержня. Выберем систему координат с началом в некоторой точке нейтральной поверхности внутри рассматриваемого участка стержня. Ось z направим параллельно оси стержня (недеформи-рованного); изгиб пусть происходит в плоскости г, х. При слабом изгибании стержня можно считать, что изгиб происходит в одной плоскости. Это связано с известным из дифференциальной геометрии обстоятельством, что отклонение слабо изогнутой кривой от плоскости (так называемое ее кручение) является малой величиной высшего порядка по сравнению с кривизной.
Аналогично тому, что мы имели в случае изгиба пластинок и кручения стержней, и при изгибе тонких стержней внешние силы, действующие на боковую поверхность стержня, малы по сравнению с возникающими внутри стержня напряжениями, и при определении граничных условий на этой поверхности их можно считать равными нулю. Таким образом, вдоль всей боковой поверхности стержня имеем oiknh = 0, или, поскольку nt = О,
+ охупу = О
и аналогично для i = у, г. Выберем такую точку на контуре поперечного сечения стержня, в которой нормаль п направлена параллельно оси х. Другая такая же точка имеется где-нибудь на противоположной стороне контура. В обеих этих точках пу = = 0, и из написанного выше равенства имеем охх — 0. Но поскольку самый стержень предполагается тонким, то, если ахх исчезает на двух сторонах его сечения, оно мало и вдоль всего сечения, так что можно положить ахх = 0 во всем стержне. Аналогичным образом убеждаемся в том, что все компоненты тензора напряжений должны быть равными нулю, за исключением только компоненты ozz. Другими словами, при изгибе тонкого стержня большой является только растягивающая (или сжимающая) компонента тензора внутренних напряжений. Деформация, в которой отлична от нуля только компонента агг тензора напряжений, есть не что иное, как деформация простого растяжения или сжатия (§ 5). Таким образом, в каждом элементе объема изгибаемого стержня происходит простое растяжение (или сжатие). Самая величина этого растяжения, конечно, различна в разных точках каждого из поперечных сечений стержня, что и приводит в результате к изгибу всего стержня.
Легко определить величину относительного растяжения в каждой точке стержня. Рассмотрим какой-нибудь элемент длины dz, параллельный оси стержня и находящийся где-нибудь вблизи начала координат. При изгибании стержня длина dz изменится, сделавшись равной dz'. Неизменными остаются только те элементы длины, которые расположены на нейтральной поверхности. Пусть R есть радиус кривизны нейтральной поверхности вблизи начала координат. Длины dz и dz' можно рассматривать как элементы дуги окружностей с радиусами соответственно R и R + х, где * — значение координаты х в точке, в которой выбран элемент dz'. Поэтому
dz' = -«±±-dz=(l+±)dz.
Относительное удлинение равно, следовательно,
dz' — dz х
Tz " R '
С другой стороны, относительное удлинение элемента длины dz равно компоненте uit тензора деформации. Следовательно,
(17,1)
Мы можем написать теперь azz, воспользовавшись непосредственно соотношением azz = Euzz, имеющим место при простом растяжении. Таким образом,
оа=--^Е. (17,2)
До сих пор еще расположение нейтральной поверхности в изогнутом стержне оставалось неопределенным. Его можно определить из условия, что рассматриваемая нами здесь деформация должна представлять собой чистый изгиб, без какого бы то ни было общего растяжения или сжатия стержня. Для этого полная сила внутренних напряжений, действующая на поперечное сечение стержня, должна быть равной нулю, т. е. должен исчезать интеграл
\ozzdf,
взятый по этой поверхности. В связи с выражением (17,2) для огг это приводит к условию
\xdf = Q. (17,3)
С другой стороны, можно ввести понятие о центре инерции сечения стержня, как о центре инерции однородного плоского диска соответствующей формы. Координаты этого центра:
\xdfj\df, \ydfj\df.
Таким образом, условие (17,3) означает, что в системе координат с началом, лежащим на нейтральной поверхности, дг-координата центра инерции сечения стержня равна нулю. Другими словами, нейтральная поверхность проходит через центры инерции поперечных сечений стержня.
Помимо игг, отличны от нуля еще две компоненты тензора деформации, так как при простом растяжении имеем ихх = uvy — = —auzz. Зная тензор деформации, легко найти также и смещения точек. Пишем:
дЧг _ х дих _______ диуах
"» dT~~R' ~ШГ~~~1у~—~ R '
fax. диг _ п дих диу _ п диу _j_ ди2 п дг ~т~ дх ~ ' ду ^ дх ~ и' ~дТ~ ^ ду '
Интегрирование этих соотношений приводит к следующим выражениям для компонент перемещения:
Постоянные интегрирования положены равными нулю; это значит, что мы закрепляем в пространстве положение начала координат.
Из формул (17,4) видно, что точки, расположенные в поперечном сечении г — const = г0, после изгиба заполняют поверхность
z = z0 + иг = z0 (1 + -j-).

|
Мы видим, что в рассматриваемом приближении сечения остаются
при изгибе плоскими, лишь поворачиваясь на некоторый угол
_ относительно своего первоначального по-
ложения. Форма же сечения меняется; так при изгибе стержня прямоугольного сечения (со сторонами а и Ь) боковые стороны ^ контура сечения у — ±Ы2 после изгиба У занимают положения
*=±-f-+^=±4(i-^-),
Рис. 14
т. е. становятся наклонными, оставаясь прямыми. Верхняя же и нижняя стороны х = ±а!2 изгибаются в параболические кривые (рис. 14):
*=±'-f+ «,= ±-Y~^-[zl + a (-ip-V)].
|
|
|
|
|
Дата добавления: 2014-11-07; Просмотров: 439; Нарушение авторских прав?; Мы поможем в написании вашей работы!