КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пример К 3
|
|
|
|
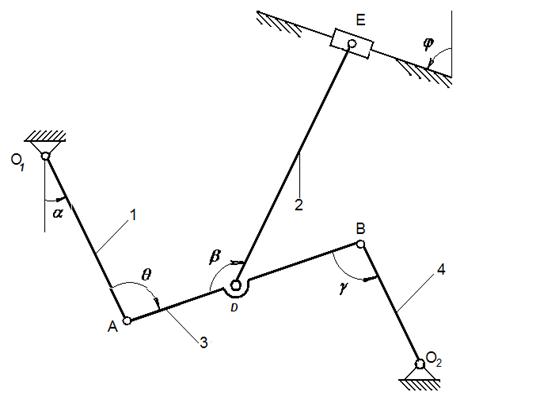
Рис. К 3.2 а
Механизм состоит из стержней 1, 2, 3, 4 и ползуна Е, соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами (рис. К 3.2).
Дано: l1=0,4 м, l2=1,2 м, l3=1,4 м, l4=0,6 м, α= 30º, β=60º, γ=30º, φ=0º, θ=120º; AD=DB; ω1 = 5 рад/c с направлением - по ходу часовой стрелки.
Определить: vB, vE, aB, ωAB, εAB.
Решение
1. Строим положение механизма в соответствии с заданными углами (рис. К-2, а).
Кинематический анализ:
- звенья О1А и О2В совершают вращательное движение;
- звенья АВ и DE совершают плоскопараллельное движение;
- ползун Е движется поступательно.
2. Для того, чтобы определить скорость точки В, принадлежащей звену АВ, необходимо найти скорость какой-либо точки этого звена. Такой точкой является точка А, принадлежащая одновременно и звену О1А, совершающему вращательное движение с угловой скоростью ω1 = 5 рад/c по ходу часовой стрелки относительно неподвижного шарнира в точке О1. Точка А движется вместе с кривошипом О1А по окружности радиуса, равного длине звена l1=0,4 м. Скорость точки А может быть определена выражением: vA = ω1l1=5·0,4=2 (м/c). Вектор скорости точки А перпендикулярен звену 1 (О1А) и направлен в сторону вращения кривошипа.
3. На основании теоремы о проекциях скоростей двух точек, принадлежащих телу, совершающему плоское движение, находим направление и модуль скорости точки В:
 ,
,  , vВ = 3,46 (м/с). Вектор скорости точки В перпендикулярен звену 4 (О2В), поскольку точка В вместе со звеном 4 совершает движение по окружности радиуса l4.
, vВ = 3,46 (м/с). Вектор скорости точки В перпендикулярен звену 4 (О2В), поскольку точка В вместе со звеном 4 совершает движение по окружности радиуса l4.
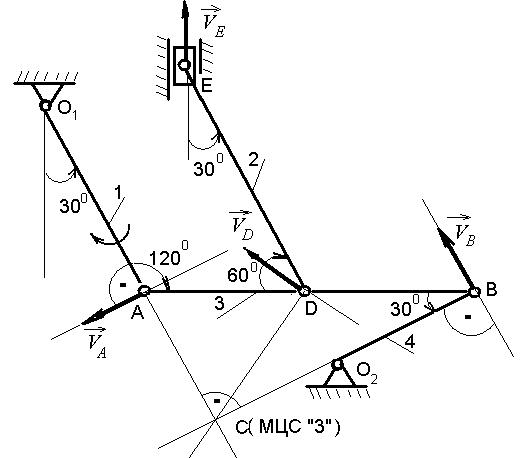
Рис. К 3.2. б
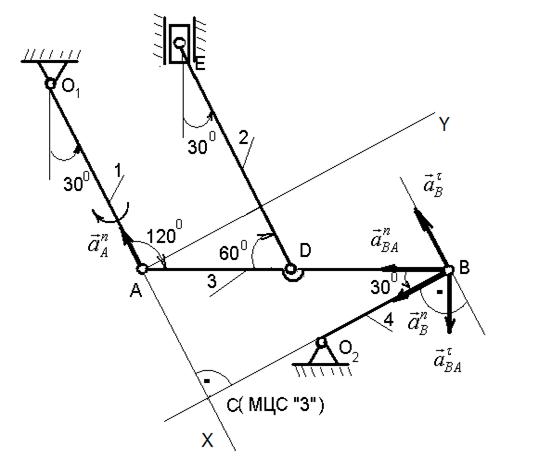
Рис. К 3.2. в
4. Для определения линии действия вектора скорости точки D построим мгновенный центр скоростей (МЦС) звена АВ: МЦСАВ(3) – точка С, лежащая на пересечении перпендикуляров, восстановленных из точек А и В к векторам их скоростей  . Вектор скорости точки D перпендикулярен отрезку DС – расстояние от точки D до мгновенного центра скоростей звена АВ, которому точка D принадлежит.
. Вектор скорости точки D перпендикулярен отрезку DС – расстояние от точки D до мгновенного центра скоростей звена АВ, которому точка D принадлежит.
5. Определяем угловую скорость звена АВ: ωАВ(3)= vA / АС, где АС - катет, лежащий против угла равного 300, АС = 0,5·АВ=0,7 (м); ωАВ(3)= 2 / 0,7=2,86 (рад/с).
6. Определяем линию действия, направление и модуль вектора скорости ползуна, принятого за материальную точку Е.
Линия действия вектора  параллельна направляющим ползуна (совпадает с осью ползуна), который движется поступательно. Направление вектора и его модуль находим, используя теорему о проекциях скоростей двух точек, принадлежащих одному и тому же телу, совершающему плоское движение:
параллельна направляющим ползуна (совпадает с осью ползуна), который движется поступательно. Направление вектора и его модуль находим, используя теорему о проекциях скоростей двух точек, принадлежащих одному и тому же телу, совершающему плоское движение:
 ,
,  , vE = vD= vA= 2 (м/с).
, vE = vD= vA= 2 (м/с).
7. Определяем  . Точка В принадлежит звену АВ. Чтобы найти её ускорение, необходимо знать ускорение какой-нибудь точки этого звена (полюса) и траекторию точки В. Точка В движется по окружности вместе с кривошипом О2В, и поэтому направление вектора
. Точка В принадлежит звену АВ. Чтобы найти её ускорение, необходимо знать ускорение какой-нибудь точки этого звена (полюса) и траекторию точки В. Точка В движется по окружности вместе с кривошипом О2В, и поэтому направление вектора  заранее известно.
заранее известно.
Ускорение точки В при плоском движении тела равно геометрической сумме ускорения полюса А и ускорения точки В при вращении вокруг полюса А:
 .
.
Разложив векторы ускорений на составляющие по естественным осям, получим следующее векторное равенство:
 .
.
Векторы ускорений будут направлены следующим образом: вектор  - по радиусу О2В к центру О2 окружности; вектор
- по радиусу О2В к центру О2 окружности; вектор  - перпендикулярно О2В в любую сторону; вектор
- перпендикулярно О2В в любую сторону; вектор  - по радиусу О1А к центру О1 вращения; вектор
- по радиусу О1А к центру О1 вращения; вектор  - по радиусу ВА к центру А вращения; вектор
- по радиусу ВА к центру А вращения; вектор  - перпендикулярно ВА в любую сторону. Поскольку по условию задачи точка А, принадлежащая звену О1А, движется равномерно, то её касательное ускорение равно 0
- перпендикулярно ВА в любую сторону. Поскольку по условию задачи точка А, принадлежащая звену О1А, движется равномерно, то её касательное ускорение равно 0  , и поэтому на чертеже вектор
, и поэтому на чертеже вектор  не изображаем.
не изображаем.
8. Спроецируем обе части уравнения на координатные оси X и Y:


9. Определяем  ,
,  ,
,  :
:


10. Подставляя известные значения в уравнения, полученные при проецировании векторной суммы, находим  и
и  : = -1,66 (м/с2),
: = -1,66 (м/с2),
= 20,07(м/с2). Знак «-» означает, что вектор касательного ускорения точки В фактически имеет направление противоположное выбранному в ходе решения задачи.
11. Находим полное ускорение точки В: 
12. Угловое ускорение звена АВ определяется выражением:
Ответ: vB=3,46(м/с), vE =2(м/с), aB =20,02(м/с), ωAB=2,86(м/с), εAB=14,34(рад/с2).
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 2245; Нарушение авторских прав?; Мы поможем в написании вашей работы!