КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основи нейрокерування
|
|
|
|
Ідеї застосування ШНМ в системах керування вперше з’явилися в середині 70-х років ХХ століття. Зокрема, сам термін «нейрокерування» вперше з’явився в роботах Вербоса вже 1976 року. Однак вирішальну роль у втіленні ШНМ у сферу розв’язання задач керування зіграли роботи Нарендри та його співавторів 1989 року.
Так ШНМ в системах керування застосовують у вигляді нейроконтролерів (нейрорегуляторів) та нейроемуляторів, що імітують динамічну поведінку ОК в цілому, або описуючих його окремі характеристики, які не піддаються математичному моделюванню.
Нейронні мережі почали застосовуватись у СК завдяки таким властивостям:
– нейронні мережі можуть реалізовувати довільні гладкі функції будь-якої складності;
– для реалізації нейромережних СК потрібна мінімальна інформація про ОК;
– під час реалізації ШНМ у вигляді спеціалізованих інтегральних мікросхем можливе паралельне оброблення інформації, що значно збільшує швидкість роботи і підвищує надійність системи.
5.2. Послідовна схема нейромережевого керування
Найпростіша схема послідовного керування за допомогою ШНМ зображена на рис. 5.1.
x

| НМ | u | ОК | y |
f
Рис. 5.1. Послідовна схема нейромережевого керування: x – вхідний задавальний сигнал системи; f – сигнали, що несуть інформацію про контрольовані збурення; u – керування, що діє на ОК; y – вихідний сигнал системи
Розрізняють два варіанти навчання ШНМ для схеми на рис. 5.1.
А саме, інверсне і предикатне.
Інверсне керування
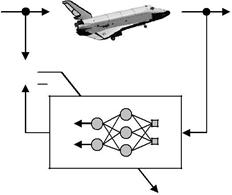
Очевидно, що в ідеальному випадку контролер у системі реалізує зворотну (інверсну)динаміку ОК.На рис. 5.2зображено схему попереднього узагальненого інверсного навчання ШНМ. За такого підходу на вхід ШНМ подають реальний вихід системи, а мережа навчається за похибкою розузгодження її виходу з реальним входом. Після завершення процесу навчання ШНМ реалізує зворотну динаміку ОК. Потім вона використовується у схемі, показаній на рис. 5.1.
Однак, за нестаціонарності ОК застосування попереднього навчання ШНМ не дозволяє отримати хороших показників керування. Тому розробили схеми, які уможливлюють оперативне (в реальному часі) навчання.
| u | ОК | y |
 e
e
|
|
|
|
|
Дата добавления: 2014-11-16; Просмотров: 493; Нарушение авторских прав?; Мы поможем в написании вашей работы!