Частотные критерии дают возможность работать с системами, имеющими запаздывание без разложения запаздывания в упрощающие ряды.
А) критерий Михайлова
Пусть САР описывается однородным ДУ Qc(p).у = 0. Собственный оператор системы Qc(p) переведем в частотную область, для этого необходимо применить преобразование Фурье (формально заменить р на jω):
Qc(p) ® Qc(jw) = .
Формулировка критерия: система устойчива, если годограф Qc(jω)
U(ω)
jV(ω)
n = 4
ω = 0
(годограф Михайлова) начинается на действительной положительной полуоси и огибает против часовой стрелки начало координат, последовательно проходя n квадрантов.
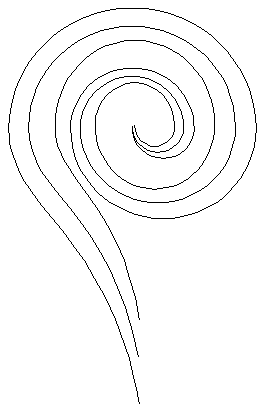
В том случае, если система имеет запаздывание, то ее годограф может представлять собой раскручивающуюся спираль, которая последовательно проходит бесконечное число квадрантов.
Рис. 7.1. Примеры годографов Михайлова САР 4-го порядка:
1 – САР устойчива; 2 – САР на границе устойчивости; 3, 4 – САР неустойчива
U(ω)
jV(ω)
n = 4
ω=0
n = 5
n = 3
n = 2
n = 1
Рис. 7.2. Примеры годографов
Михайлова устойчивых систем
различного порядка
t bFBLBQYAAAAABAAEAPMAAAD1BQAAAAA= " stroked="f">
Рис. 7.3. Пример годографа
Михайлова устойчивой САР
с запаздыванием
U(ω)
jV(ω)
ω = 0
Для оценки устойчивости точный вид годографа Михайлова знать необязательно, а необходимо знать точки пересечения с его осями и последовательность их расположения, т.е. значения ω, которым они соответствуют. Для нахождения этих точек можно воспользоваться двумя условиями:
= 0 – условие пересечения с осью V(ω);
= 0 – условие пересечения с осью U(ω);
(когда оба условия выполняются при одинаковых значениях ω, то система находится на границе устойчивости).
Процедура нахождения точек:
1. Решая уравнение, описывающее условие пересечения с одной из осей, определяем значения частот, соответствующих точкам пересечения, как корни этого уравнения.
2. Подставляем значения найденных частот в другое выражение, найдем точки пересечения с осью, соответствующие этим частотам.
Б) критерий Найквиста
Позволяет судить об устойчивости замкнутой системы по годографу (АФЧХ) соответствующей разомкнутой системы с передаточной функцией: Wpc(p) = . Это произведение передаточных функций, входящих в замкнутый контур САР.
В частотной области она принимает вид:
Wpc(jw) = = Apc(w) = Upc(w) + jVpc(w).
Важно: Apc(w) = Ap(w); jpc(w) = + jp(w).
Индекс «о» обозначает характеристику объекта, «р» – регулятора, «рс» – разомкнутой системы.
Формулировка критерия (для случая, когда САР в разомкнутом состоянии устойчива): замкнутая САР устойчива, если годограф (АФЧХ) разомкнутой системы не охватывает точку с координатами (–1; j0).
Примеры:
j
ω = 0
ω = ωгу
∞ ← ω
-1
Рис. 7.4. Примеры АФЧХ
статических разомкнутых систем.
Соответствующая замкнутая САР:
1 – устойчивая; 2 – на границе
устойчивости; 3 – неустойчивая
Рис. 7.6. Пример АФЧХ астатической
разомкнутой системы второго порядка
и построения условной дуги для
определения охвата им точки (–1; j0)
j
-1
Кр1 < Кр2
Кр2 = 2Кр1
Ap(ω) = Кр
Рис. 7.7. Пример изменения АФЧХ
разомкнутой САР со статическим
объектом и П- регулятором при
изменении коэффициента
передачи регулятора
j
ω = ωгу
0←ω
-1
Рис. 7.5. Примеры АФЧХ
астатических разомкнутых
систем первого порядка.
Соответствующая замкнутая САР:
1 – устойчивая; 2 – на границе
устойчивости; 3 – неустойчивая
j
-1
Условная дуга
бесконечного
радиуса
w®¥
На основе критерия Найквиста вводят понятие запасов устойчивости САР по модулю и по фазе. Коэффициент запаса устойчивости по модулю САР показывает насколько должна измениться длина радиус-вектора АФЧХ, т.е. Ac(ω) при неизменном jc(ω) = –π, чтобы система вышла на границу устойчивости.
Запас устойчивости по фазе показывает, насколько должна измениться фаза АФЧХ при неизменной, равной единице, ее амплитуде – Арс(ω) = 1 (длине радиус-вектора) чтобы система вышла на границу устойчивости.
j
ω = 0
-1
Ac(ω) = 1
Запас устойчивости
по амплитуде DАГУ
Запас устойчивости
по фазе DjГУ
Запасы устойчивости САР по амплитуде (модулю) DАГУ и DjГУ по фазе, можно пересчитать в запасы ее устойчивости по коэффициенту передачи и времени запаздывания объекта :
,
Рис. 7.8. Иллюстрация определения
запасов устойчивости
где w–p – значение частоты, при которой фазовый сдвиг в разомкнутой САР равен –p;
w1 – значение частоты, при которой значение АЧХ разомкнутой САР равно 1;
А(w–p) – значение АЧХ разомкнутой САР при частоте w = w–p.
ЛЕКЦИЯ №8
Области устойчивости САР в пространстве параметров регулятора и объекта
Для практики важно ответить на следующие вопросы:
1) при каких вариациях настроек параметров регулятора САР с заданным объектом будет сохранять устойчивость?
2) при каких вариациях параметров объекта САР с заданным регулятором и с рассчитанными настройками (фиксированными) будет сохранять устойчивость?
Геометрическое место точек в пространстве варьируемых параметров регулятора или объекта, при которых система будет находиться на границе устойчивости – называется границей устойчивости САР в этом пространстве параметров. Обратите внимание на двойственность понятия «граница устойчивости».
Граница устойчивости может быть найдена аналитическими, либо алгоритмическими методами (в частности – экспериментально).
Аналитические выражения, описывающие границу устойчивости, могут быть получены на основе критериев устойчивости. Поскольку при наличии запаздывания использование аналитических критериев затруднительно, то воспользуемся частотными критериями и запишем системы уравнений, которые позволяют найти необходимые аналитические выражения:
из критерия Найквиста, в полярной системе
координат;
а)
из критерия Найквиста, в прямоугольной системе
координат;
б) из критерия Михайлова (8.1)
Пример. Воспользуемся критерием Михайлова и найдем аналитическое выражение для границы устойчивости САР с объектом первого порядка с запаздыванием и ПИД-регулятором.
В п. 1.5.3. мы нашли собственный оператор такой САР:
В соответствии с условиями устойчивости (8.1) граница устойчивости будет задаваться следующей системой параметрических уравнений:
(8.2)
Пусть мы хотим построить границу устойчивости в пространстве параметров регулятора: kp, , Tпр. Параметры объекта принимаются постоянными: k0, T0, τ0, ν.
Порядок построения границ:
1) задаемся диапазоном изменения ωгу. Для простейших одноконтурных систем можно принять ωгу Î ;
2) выбираем два из трех параметров, в плоскости которых будем строить границу устойчивости, чаще это kp, . Третий параметр будем перебирать, получая семейство границ: Tпр = Tпрi, ;
3) решаем (8.2) относительно выбранных параметров kp, ;
4) подставляем в уравнение (8.2) численные значения параметров объекта, а также Тпрi, и перебираем ωгу в выбранном диапазоне с мелким шагом, ждем, когда оно обратится в ноль.
5) строим границу устойчивости, подставляя ωгу в выражения для kp, ;
6) изменяем Тпр и повторяем процедуру с п. 2.
kp
Область
устойчивости
САР
Область
неустойчивости
САР
ГУ для САР с
И-регулятором
ГУ для САР с
П-регулятором
ГУ для САР с
ПИ-регулятором
ОУ без
регулятора
=
Рис. 8.1
kp
Область
устойчивости
САР
Область
неустойчивости
САР
Тпр4
Тпр3
Тпр2
Тпр1
Тпр1 < Тпр2 < Тпр3; Тпр4 >> Тпр3
Рис. 8.2
Важно: для И- регулятора и астатического объекта области устойчивости нет, т.е. система структурно неустойчивая. Таким образом, интегрирующий регулятор с астатическим объектом применять нельзя – так как система будет неустойчива при любом значении настроечного параметра регулятора.
kp
Область
устойчивости
САР
Область
неустойчивости
САР
Тпр3
Тпр2
Тпр1 = 0
ПИ – рег.
Рис. 8.3. Пример границ устойчивости для астатического ОУ
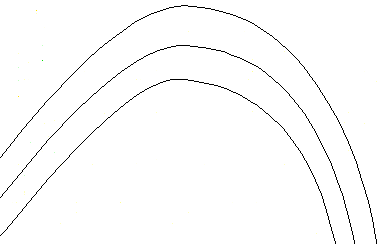
Граница устойчивости в плоскости параметров ОУ позволяет оценить диапазоны их возможного изменения САР до наступления неустойчивости. Это важно для обеспечения работоспособности САР в реальных условиях.
Важно: увеличение значения приводит к уменьшению области устойчивости системы, т.е. к усложнению управления ОУ.
Выше был рассмотрен аналитический подход к построению границы устойчивости. Рассмотрим алгоритмический подход, в основе которого лежит специальный эксперимент (может
k0
Область
устойчивости САР
Область
неустойчивости
САР
kp1
kp2
kp3
kp1 < kp2 < kp3
kоi
(to/To)i
D(to/To)ГУ
Рис. 8.4. Пример границ устойчивости САР
в пространстве параметров объекта
проводиться на цифровых или аналоговых моделях, а при необходимости – на реальном объекте).
Целесообразный алгоритм нахождения границы устойчивости (см. рис. 8.5):
1) настроить Тиз ® ¥, т.е. взять П-регулятор и, изменяя kр, найти ;
2) диапазон kp Î [0, ] разбить на 5 – 7 интервалов;
3) для значений kр соответствующих выбранным интервалам разбиения, подбираем такие значения , при которых переходные процессы будут слабозатухающими или слаборасходящимися.
kр
для И-регулятора;
для П-регулятора
Рис. 8.5
ЛЕКЦИЯ №9
АНАЛИЗ КАЧЕСТВА САР
Ошибки стабилизации и воспроизведения САР
Входными воздействиями САР являются задающие и возмущающие воздействия (переменные). Они принципиально отличаются друг от друга тем, что в первом случае регулируемые переменные САР должны по возможности более точно соответствовать входным (задающим) переменным, во втором случае – не зависеть от входных (возмущающих) воздействий. Изменение регулируемой переменной при указанных входных воздействиях, описывается следующим уравнением движения:
y(t) = .
Подчеркнем, что для линейных систем аддитивные составляющие и yf можно рассматривать независимо. Поэтому и ошибку регулирования Δy можно также рассматривать как сумму двух независимых составляющих:
Dy = yзд - y = Dyвоспр + Dyстабил,
где Dyвоспр – ошибка воспроизведения, т.е. составляющая ошибки Δy, возникающая в САР при изменяющемся yзд и неизменном f;
Dyстабил – ошибка стабилизации, т.е. составляющая ошибки Δy, возникающая в САР при изменяющемся f и неизменном yзд.
Сама ошибка Δy и каждая из указанных ошибок может в свою очередь быть подразделена на составляющие: ошибки в переходных и установившихся процессах.
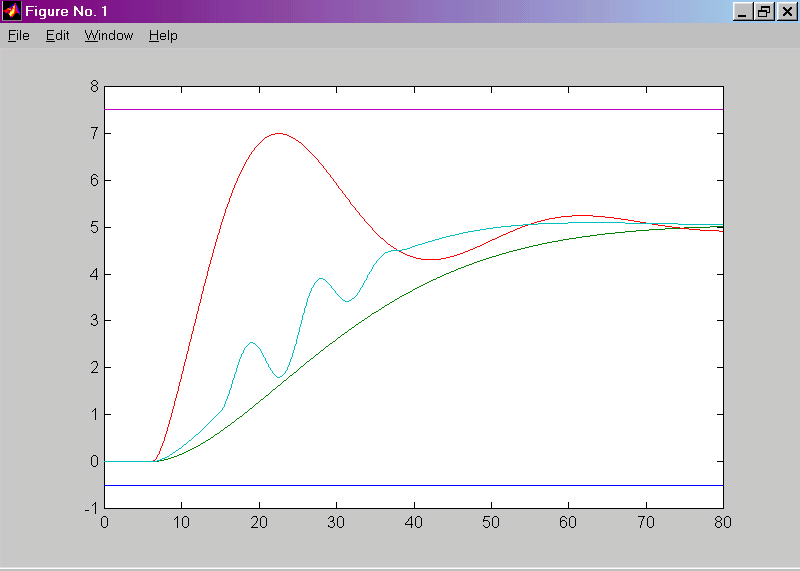
Качество переходных процессов в САР при ступенчатых входных воздействиях
Замечание: принято переходные процессы в САР классифицировать по их основным признакам: апериодические и колебательные. Иногда вводят третий вид переходного процесса – апериодический с колебательной составляющей.
На рис. 9.1 представлены характерные варианты переходных процессов в САР при ступенчатых изменениях yзд и f, при нулевых начальных условиях по каналам задания и возмущения (переходные характеристики САР по этим каналам), соответствующие видам ПП.
t
y
t
f
t
y
yзд
t
Рис. 9.1
Прямые показатели качества переходных процессов (переходных характеристик) и их определение
Под прямыми показателями качества понимают некоторые специальные характеристики переходного процесса в САР вызванного ступенчатым входным воздействием при нулевых начальных условиях, которые определяются непосредственно из графика переходной характеристики. Среди них наиболее часто рассматриваются:
1. Максимальное динамическое отклонение Δymax (здесь и далее см. рис. 9.2).
t
y
tрег
Δymax º Dy1
Δy2
Δy3
Δy0
Объект с само-
выравниванием
Δyст
ЗНО
y
f
yзд
Δyст
tрег
Δymax º Dy1
Δy2
ЗНО
t
Δy3
t
t
Рис. 9.2
2. Время переходного процесса (время регулирования) tрег. Под временем переходного процесса будем понимать отрезок времени от момента изменения входного воздействия до момента, когда переходный процесс войдет в зону незначимых отклонений (ЗНО) и больше не выедет из нее. ЗНО определяет такие отклонения y от yзд, которыми для конкретного ОУ можно пренебречь.
3. Динамический коэффициент регулирования. Используется только для переходных процессов по каналу возмущения и статических (с самовыравниванием) ОР. Характеризует эффективность подавления регулятором последствий возмущений, сравнивая отклонения в САР без регулятора («чистый» объект) и с регулятором:
В тех случаях, когда ПП имеет ошибку статизма, которая превышает ЗНО, то время регулирования считается: а) по времени вхождения в зону равную ЗНО относительно ошибки статизма, если нас интересует время окончания переходной со-
6. Ошибка статизма Δyст – ошибка Δy после окончания переходных процессов, которую принципиально невозможно устранить используемому регулятору.
t
y
Δymax
Экспонента
Δymax
Δymax
ставляющей процесса; б) время переходного процесса стремится к бесконечности, если нас интересует время вхождения в ЗНО.
Нюансы: в том случае, если ПП относится к «третьему» типу, то если мы хотим оценить колебательную составляющую, то необходимо выделить апериодическую и относительно нее определить Rп или Ψ.
Регламентные зоны переходного процесса
Для конкретных ОУ, исходя из требований технологий и эксплуатации технологических машин, могут быть заданы конкретные требования к отклонениям (ошибкам регулирования) Δy. Они могут относиться:
а) к предельно допустимым динамическим отклонениям ;
б) к отклонениям, которыми можно пренебречь, т.е. ЗНО;
в) к времени существования допустимых отклонений за пределами ЗНО - tпп доп.
Эти заданные, предельные, допустимые значения определяют регламентную зону переходного процесса (обычно симметричную).
t
Δy
t
Δy
ЗНО
Регламентная зона
переходного процесса
tпп доп = tрег
Рис. 9.3. Вид регламентной зоны ПП и примеры переходных процессов,
которые 1 – удовлетворяет регламентной зоне;
2 – не удовлетворяет регламентной зоне (по Δymax);
3 – не удовлетворяет регламентной зоне (по Δyстат);
4 – не удовлетворяет регламентной зоне (по tрег)
ЛЕКЦИЯ №10
Интегральные показатели качества
Прямые показатели качества характеризуют переходные процессы с разных сторон, но их весьма затруднительно использовать в качестве критериев при синтезе (оптимизации САР), поскольку основные из них противоречат друг другу. Для задач синтеза чаще используют интегральные показатели, которые характеризуют переходный процесс в целом. Рассмотрим наиболее часто встречающиеся.
1. Линейный интегральный показатель
І1 = , Dy(t) = yзд – y.
Δy
S
t
f
Δy
+
+
-
t
t
Рис. 10.1
Характеризует площадь под кривой ПП. Применяется только для оценки качества апериодических ПП или используется в совокупности с другими показателями (см. рис. 10.1).
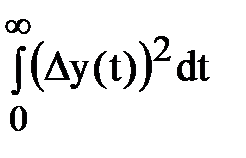
2. Модульный интегральный показатель (см. рис. 10.2):
І2 = .
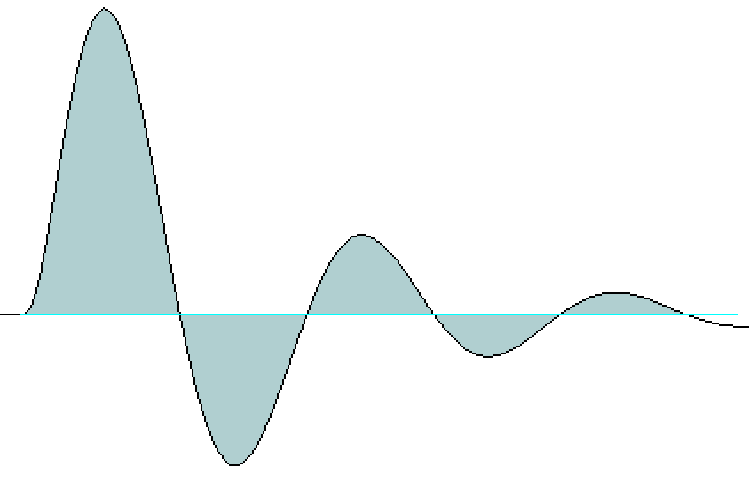
3. Интегральный квадратичный показатель (см. рис. 10.3):
І3 = .
По сравнению с I2 в I3 большие отклонения «штрафуются» более, малые – меньше. Очень удобно использовать при аналитических расчетах, т.к. этот интеграл можно «взять».
f
t
Δy, |Δy|
t
+
+
+
t
Δy
t
f
Рис. 10.2 Рис. 10.3
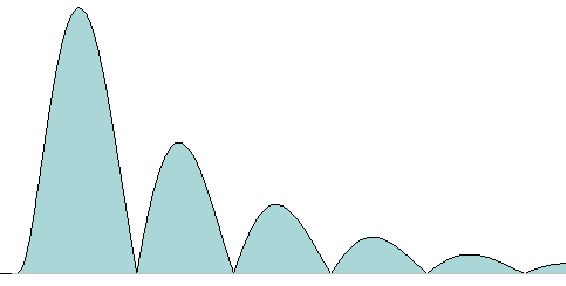
4. Интегральный квадратичный показатель, учитывающий величину скорости протекания переходного процесса
І4 = ,
где Ty – весовой коэффициент, приводящий слагаемые показателя к одной единице измерения и отражающий своей величиной степень компромисса между требованиями минимизации площади под Dy2(t) и под .
В принципе, в состав критерия может входить большое количество производных.
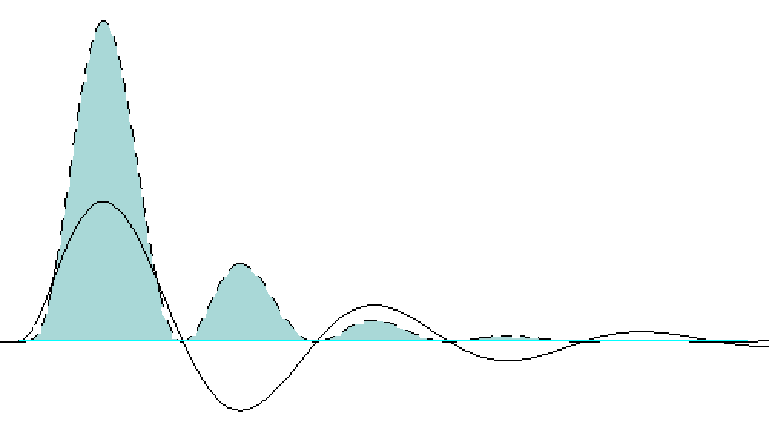
5. Другие виды интегральных показателей качества
Один из характерных критериев, который требует с одной стороны минимизации площади под y2(t), с другой – под y(t), имеет вид:
І = , где a - весовой коэффициент.
Такой критерий употребляют, например, для анализа и синтеза систем многокомпонентного непрерывного дозирования.
Отметим, что при аналитических методах расчета, верхний предел интеграла – бесконечность. При использовании методов имитационного моделирования, верхний предел является конечным и равен времени моделирования. Это надо учитывать.
Статизм и астатизм типовых САР
№
п/п
Свойства канала
регулирования
объекта
Алгоритмы
регулирования
Свойства САР
по каналу
возмущения
по каналу
задания
1.
Статический
(с самовыравниванием)
П, ПД
статическая
статическая
2.
Статический
(с самовыравниванием)
И, ПИ, ПИД
астатическая
первого
порядка
астатическая
первого
порядка
3.
Астатический
(без самовыравнивания)
П, ПД
статическая
астатическая
первого
порядка
4.
Астатический
(без самовыравнивания)
ПИ, ПИД
астатическая
астатическая
второго
порядка
Замечание: САР с астатическим объектами и И-регулятором структурно неустойчива.
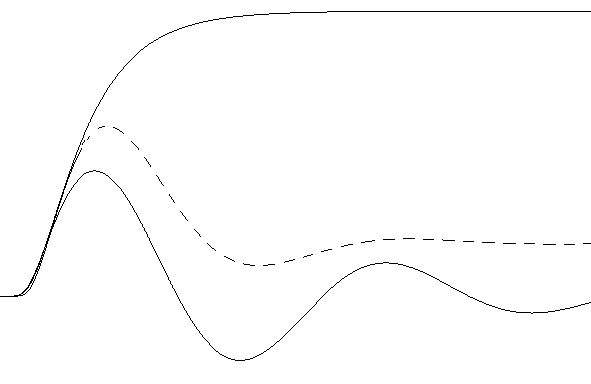
Примеры переходных процессов в статических и астатических САР при ступенчатых и линейно возрастающих входных воздействиях представлены на рис. 10.4.
t
f
t
yзд
t
f
t
y
Разомкнутая САР
Статическая САР
Астатическая САР
yзд
y
t
Статическая САР
Астатическая САР
t
t
y
Статическая САР
Астатическая
САР
II порядка
Астатическая
САР
I порядка
yзд
y
Разомкнутая
САР
Статическая
САР
Астатическая САР
I порядка
Астатическая САР
II порядка
t
Рис. 10.4. Переходные процессы в статических и астатических САР
при ступенчатых и линейно возрастающих входных воздействиях
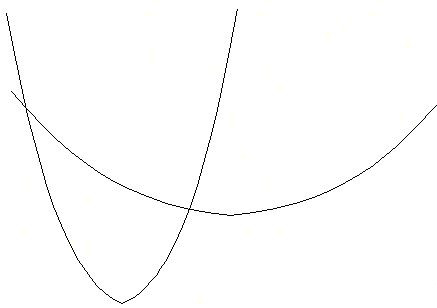
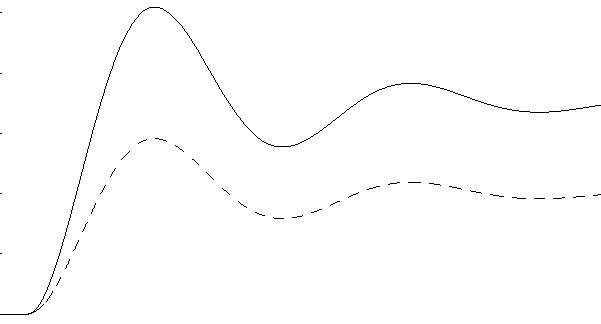
Понятие о грубости и чувствительности САР
Система называется грубой (в смысле Андронова) в том случае, если при малых вариациях ее параметров, свойства системы, в частности, показатели качества, также изменяются мало.
Система (1) при оптимальных настройках и неизменных свойствах объекта обладает более низкими качественными показателями. Однако, если k0 начинает изменяться в достаточно заметных диапазонах, то показатели качества системы (1) меняются сильно. Показатели качества системы (2) – незначительно. В целом, среднее значение показателя качества у системы (2) может оказаться выше, чем у системы (1). Кроме того, для системы (1) изменение k0 может привести не только к ухудшению I, но и к потере устойчивости.
Для практики промышленных систем управления грубость системы фактически означает ее работоспособность. Негрубые системы в промышленности неработоспособны.
Система (3) совсем негрубая.
В тех случаях, когда для синтеза системы используются модели объекта с точечными (фиксированными) оценками параметров объекта, и есть уверенность, что свойства объекта не изменяются в больших диапазонах, целесообразно проверять грубость (работоспособность) системы при вариациях параметров объекта, например ± 20 %.
В последнее время, вместо тер-
I
k0kр
I1
I2
I3
Рис. 10.5
мина «грубость» часто используется термин «робастность».
Понятие грубости трактуется как качественное понятие. Для количественной оценки влияния вариаций параметров объекта и регулятора на показатели качества системы, используется понятие чувствительности САР (САУ). В общем случае, чувствительность системы рассматривается как полная производная выбранного показателя качества САУ по всем ее параметрам. При этом частные производные по конкретному параметру, являются функциями чувствительности по этому параметру.
studopedia.su - Студопедия (2013 - 2026) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление
 .
.
 = 0 – условие пересечения с осью V(ω);
= 0 – условие пересечения с осью V(ω); = 0 – условие пересечения с осью U(ω);
= 0 – условие пересечения с осью U(ω); . Это произведение передаточных функций, входящих в замкнутый контур САР.
. Это произведение передаточных функций, входящих в замкнутый контур САР. = Apc(w)
= Apc(w)  = Upc(w) + jVpc(w).
= Upc(w) + jVpc(w). Ap(w); jpc(w) =
Ap(w); jpc(w) =  + jp(w).
+ jp(w).


 и времени запаздывания объекта
и времени запаздывания объекта  :
:
 ,
,

 из критерия Михайлова (8.1)
из критерия Михайлова (8.1) .
. = -TизTow2 - kokp(TизTпрw2 + 1)coswto – Tизwkokpsinwto
= -TизTow2 - kokp(TизTпрw2 + 1)coswto – Tизwkokpsinwto = Tизnw + kokpTизwcoswto – kokp(TизTпрw2sinwto – sinwto)
= Tизnw + kokpTизwcoswto – kokp(TизTпрw2sinwto – sinwto)
 , Tпр. Параметры объекта принимаются постоянными: k0, T0, τ0, ν.
, Tпр. Параметры объекта принимаются постоянными: k0, T0, τ0, ν. ;
; . Третий параметр будем перебирать, получая семейство границ: Tпр = Tпрi,
. Третий параметр будем перебирать, получая семейство границ: Tпр = Tпрi,  ;
; ;
; ;
;
 =
= 


 приводит к уменьшению области устойчивости системы, т.е. к усложнению управления ОУ.
Выше был рассмотрен аналитический подход к построению границы устойчивости. Рассмотрим алгоритмический подход, в основе которого лежит специальный эксперимент (может
приводит к уменьшению области устойчивости системы, т.е. к усложнению управления ОУ.
Выше был рассмотрен аналитический подход к построению границы устойчивости. Рассмотрим алгоритмический подход, в основе которого лежит специальный эксперимент (может

 ;
; ] разбить на 5 – 7 интервалов;
] разбить на 5 – 7 интервалов; , при которых переходные процессы будут слабозатухающими или слаборасходящимися.
, при которых переходные процессы будут слабозатухающими или слаборасходящимися.

 для И-регулятора;
для И-регулятора;
 для П-регулятора
для П-регулятора
 .
. и yf можно рассматривать независимо. Поэтому и ошибку регулирования Δy можно также рассматривать как сумму двух независимых составляющих:
и yf можно рассматривать независимо. Поэтому и ошибку регулирования Δy можно также рассматривать как сумму двух независимых составляющих: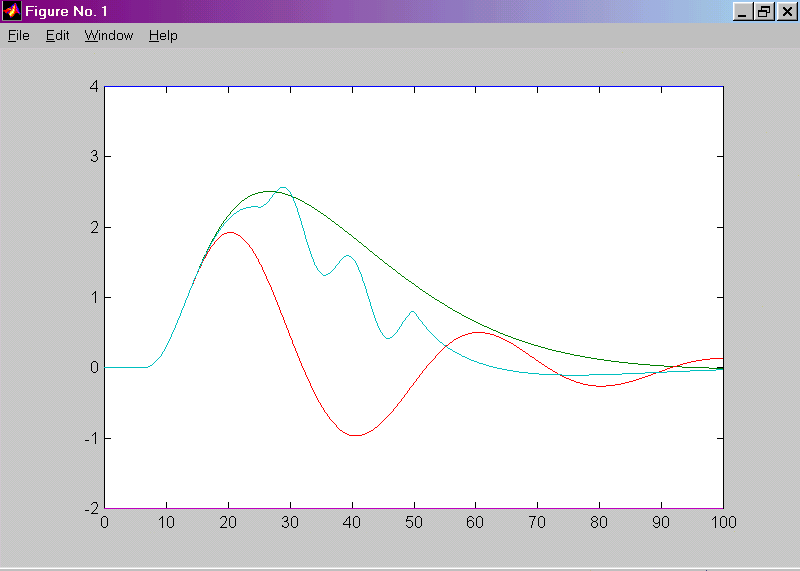








 .
.
 (все отклонения берутся по модулю).
(все отклонения берутся по модулю). ;
;


 , Dy(t) = yзд – y.
, Dy(t) = yзд – y.

 .
. .
.
 ,
, .
. , где a - весовой коэффициент.
, где a - весовой коэффициент.











 и неизменных свойствах объекта обладает более низкими качественными показателями. Однако, если k0 начинает изменяться в достаточно заметных диапазонах, то показатели качества системы (1) меняются сильно. Показатели качества системы (2) – незначительно. В целом, среднее значение показателя качества у системы (2) может оказаться выше, чем у системы (1). Кроме того, для системы (1) изменение k0 может привести не только к ухудшению I, но и к потере устойчивости.
и неизменных свойствах объекта обладает более низкими качественными показателями. Однако, если k0 начинает изменяться в достаточно заметных диапазонах, то показатели качества системы (1) меняются сильно. Показатели качества системы (2) – незначительно. В целом, среднее значение показателя качества у системы (2) может оказаться выше, чем у системы (1). Кроме того, для системы (1) изменение k0 может привести не только к ухудшению I, но и к потере устойчивости.