КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Расход через сопло 2 запишется аналогично
 |
При среднем положении заслонки при h=0 соблюдается равенство расходов
 |
Так как у ГУ оба плеча симметричны R3=R4, то
 |
а расходы через постоянные дроссели будут определяться соотношениями
где GП – проводимость постоянных дросселей.
При перемещении золотника в диагонали моста расходуется жидкость
 |
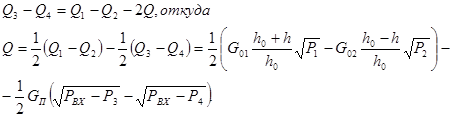
На основании схемы ГУ можно записать
 |
откуда после вычитания одного из другого, получим
Полученное выражение является нелинейным. При расчётах его обычно линеаризуют. Для этого рассматривается случай, когда гидравлические сопротивления при нейтральном положении заслонки для всех четырёх дросселей одинаковы
 |
При этом крутизна характеристики ГУ максимальна. Давление на торцах золотника представляется в приращениях по отношению к равновесному давлению при h=0
 |
Так как при h=0, DP=0 и Р3=Р4, то
откуда получим для определения равновесного давления Р0, соответствующего максимальной крутизне,

С учётом проделанных выкладок выражение для расхода будет иметь вид

Раскладывая полученное выражение в ряд можно получить для дасхода в ГУ следующее выражение:
где:
Полученное выражение связывает расход Q с перемещением заслонки h и перепадом давления DР.
Теперь обратимся к уравнению равновесия сил на золотнике:
 |
Где mЗ – масса золотника, FГ=сГ х – гидродинамическая сила, действующая на золотник, FП=сП х – упругая сила пружины. Анализ ил, входящих в последнее уравнение показывает, что в ГУ с центрирующими пружинами инерционные и скоростные составляющие сил, действующих на золотник, малы по сравнению с упругой силой пружины, т. е.:
 |
откуда получаем:
 |
С учётом изложенного, перемещение заслонки h связано с перемещением золотника дифференциальным уравнением
 |
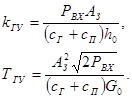
откуда получим передаточную функцию ГУ, приведённую ниже
|
| ||||
| |||||

 где:
где:
 |

|
Cтруктурная схема электрогидравлического рулевого привода.
В заключении лекции рассмотрим структурную схему гидравлического рулевого привода в общем случае, которая получена путём соединения в соответствии с функциональной схемой рассмотренных выше отдельных участков структурной схемы.
Система уравнений, описывающих работу привода, имеет вид:
1.
 |
Уравнение сумматора: где напряжение в цепи обратной связи определяется по соотношению:
 |
2. Уравнение усилителя:
 |
3. Уравнение ЭМП:
 |
4. Угловое отклонение якоря, выраженное через длину якоря lя связано с перемещением золотника h:
 |
5. Уравнение гидравлического усилителя связывает перемещение заслонки с перемещением золотника
6.
|
Уравнение неразрывности (баланса) расходов ДГП
 |
7. Уравнение равновесия моментов на выходном валу ДГП мы рассматривали при анализе нагрузок на выходном валу привода. Момент нагрузки уравновешивается развиваемым моментом привода:
 |
Применяя к приведённой системе уравнений преобразование Лапласа при нулевых начальных условиях, получим систему уравнений привода в операторной форме, на основании которой ниже построена структурная схема:
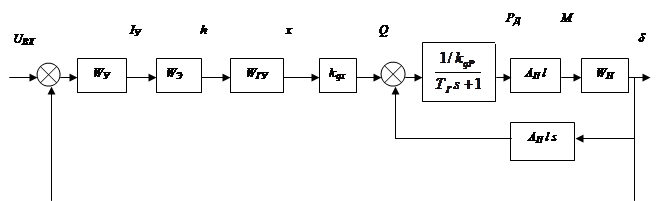



|
ЛАЧХ электрогидравлического привода.
Выше представлены результаты исследования гидравлического привода. В частности было показано, что внутренний контур можно заменить апериодическим и колебательным звеньями. Указывалось, что постоянные времени усилителя и ЭМП малы и ими можно пренебречь ТУ=0 и ТЭ=0. С учётом принятых допущений передаточная функция разомкнутого ЭГП может быть представлена следующим образом

|
|
|
|
|
|
|
|
|



















 где, для примера, динамические показатели могут иметь следующие значения: ТШ=1,5 с, ТГУ=0,01 с, ТГП=0,00016 с, zГП=0,1.
где, для примера, динамические показатели могут иметь следующие значения: ТШ=1,5 с, ТГУ=0,01 с, ТГП=0,00016 с, zГП=0,1.
величина kПР выбирается исходя из заданных запасов устойчивости по фазе не менее Df=500 и по амплитуде DL=6дБ.
После замыкания привода обратной связью получим частотную характеристику замкнутого привода, которую на основании приведённой характеристики можно приближённо представить в виде:
 |
Где постоянная времени ТПР определяется по частоте, где сдвиг по фазе замкнутого привода равен 900. При наличии большой разницы сопряжённых частот 1/ТПР и 1/ТГП вторым колебательным звеном можно пренебречь и приближённое представление замкнутого привода в частотной области будет иметь вид:

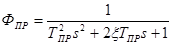 |
О переходном процессе привода.
При отработке приводом входных сигналов параметры привода выходят за область линейности характеристик. Для корректного описания его частотных характеристик необходимо в структурную схему включить нелинейное звено, как это показано на рисунке.
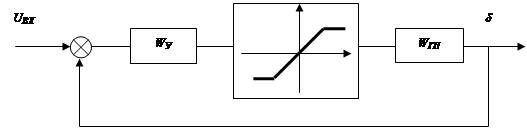 |
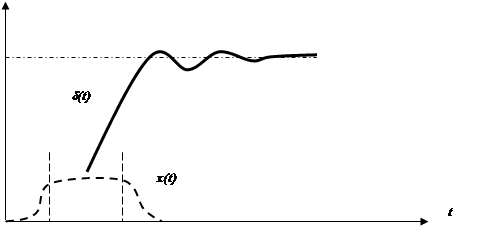
В данном случае это ограничение по перемещению золотника. Для ЭГП это ограничение начинает работать при входных сигналах превышающих уже 2о…3о. С учётом ограничения по перемещению золотника характер переходного процесса привода будет иметь вид, представленный на графике:
 |
|
|

После выхода золотника на упор (t=t1) выходной вал привода движется с постоянной скоростью до t=t2. Для определения реальных частотных характеристик привода в этом случае можно использовать гармоническую линеаризацию нелинейности. Можно проводить численное решение нелинейных дифференциальных уравнений привода.
|
|
Дата добавления: 2014-11-20; Просмотров: 457; Нарушение авторских прав?; Мы поможем в написании вашей работы!