Лекция 9. Описание работы газогидравлического привода общей системой дифференциальных уравнений.
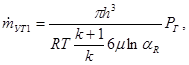
1. Дифференциальное уравнение работы ТТГГ – уравнение расходов:
где:
массовый расход газа через торцовый зазор между блоком цилиндров и распределителем газа:
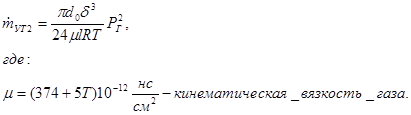
массовый расход газа через кольцевой зазор в плунжерной паре:
2. Уравнение нагрузки на валу ГМ:
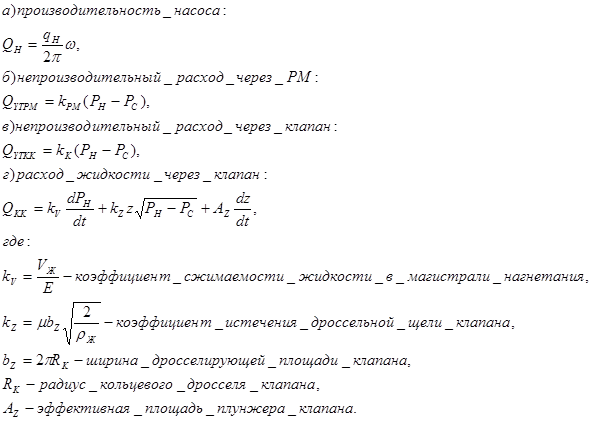
3. Уравнение расходов жидкости в гидроприводе:
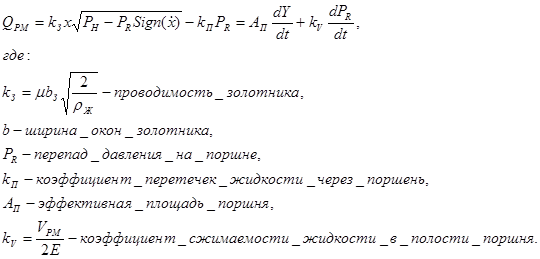
где:
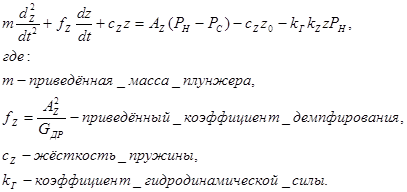
4. Баланс сил на клапане:
5.Уравнение расходов в РМ:
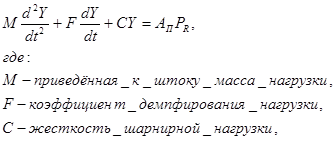
4. Уравнение равновесия сил на поршне:
5. Уравнение отрицательной обратной связи:
8.Структурная схема газогидравлического привода. (см. файл МАИ/структура.doc).
В штурвальных системах управления самолётов широко используются гидравлические рулевые приводы с механическим управлением, преобразующие маломощные механические сигналы в виде перемещения штурвала в соответствующие перемещения органа управления самолётом. Такие приводы представляют собой следящие системы с позиционной механической отрицательной обратной связью.
Конструктивная схема простейшего рулевого привода с механическим управлением (рис. 9.1) включает в себя гидроцилиндр, золотниковое распределительное устройство и рычаг механической обратной связи АОБ.
Слив
А
Подача
Золотник
Р2
Р1
ХП
ХЗ
О
Б
Гидроцилиндр
Рулевая поверхность
Сигнал от пилота
Лётчик штурвалом через механическую проводку смещает входное звено рулевого привода (звено А). Открытие соответствующих рабочих окон гидрораспределителя обеспечивает поступление потока жидкости из магистрали подачи в одну из полостей гидроцилиндра и слив жидкости из другой полости. По мере перемещения поршня гидроцилиндра в процессе отработки управляющего сигнала золотник гидрораспределителя возвращается рычагом обратной связи в нейтральное положение, соответствующее нулевому полезному расходу.
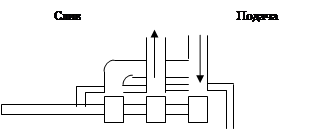
Следует отметить, что, несмотря на простоту принципиальной схемы, рулевой привод является достаточно сложным гидравлическим агрегатом и представляет собой следящую систему с позиционной отрицательной обратной связью. Существует большое число разновидностей бустеров (рис.9.2а,б).
Наиболее часто в качестве гидродвигателя применяется гидроцилиндр с поршнем, отличающийся простотой и высокой надёжностью, а также достаточным быстродействием.
В качестве золотникового распределителя рабочей жидкости применяются, как правило, цилиндрическиечетырёхкромочные золотники с положительным перекрытием приёмных каналов. Для повышения устойчивости привода иногда перекрытие рабочих кромок составляет до 2*10-4 м. Перекрытия и специальное профилирование рабочих кромок уменьшают наклон регулировочной характеристики привода и, следовательно, значения коэффициента усиления по расходу жидкости в области малых сигналов.
По способу реализации обратной связи различаются схемы с внутренней (рис. 9.2,а) и рычажной кинематической обратной связью (9.2,б). В схемах с внутренней обратной связью втулка золотника с рабочими окнами связана с подвижным выходным звеном, что обеспечивает закрытие дросселирующих окон в процессе слежения.
Существуют две основные разновидности таких схем: «золотник в штоке» и «золотник в корпусе» в зависимости от того, что является подвижным выходным звеном – поршень или корпус привода. Характерной особенностью этой схемы является тот факт, что перемещение выходной точки равно перемещению входной и
Слив
К рулевой поверхности
От пилота
направление перемещения совпадает.
Золотник в штоке
Золотник в корпусе
От пилота
К рулевой поверхности
На практике широко используются специальные конструкции рулевых приводов (многокамерные), работающие одновременно от нескольких параллельных гидросистем при надёжной изоляции друг от друга. Привод включает в себя два распределительных золотника и два гидроцилиндра – камеры, расположенных тандемом, поршни которых закреплены на общем штоке. Каждая из камер управлятся собственным золотником от отдельной гидросистемы. Золотники камер связаны с общей входной точкой бустера жёстко или через пружинную тягу и перемещаются синхронно. При отказе одной из гидросистем выходит из строя соответствующая камера рулевого привода, однако его работоспособность сохраняется, хотя выходное усилие снижается в два раза.
Комбинированные приводы состоят из исполнительного механизма и встроенного сервопривода. Последний представляет собой электрогидравлический следящий привод небольшой мощности и содержит, как правило, все основные элементы такого привода: усилитель сигнала ошибки, электрогидравлический усилитель и исполнительный гидродвигатель с датчиком обратной связи по положению.
Рассмотрим основные статические характеристики бустеров.
1. Регулировочная характеристика – зависимость установившейся скорости vп движения поршня (выходной точки) от величины открытия золотника хз при отсутствии внешней нагрузки Fн.
xзmax
Vmax
2b1
хз
Vп
хз
Vп
Vmax
2b1
Возможные формы регулировочных характеристик показаны на рис. 9.3.
в)
vп
хз
хзmax
б)
a)
2b1 - зона нечувствительности,
- механическое ограничение хода золотника.
Возможные формы регулировочных характеристик показаны на рис. 9.3. На рис. 9.3,б показана характеристика с ограничением хода золотника, на рис. 9.3,в – линейная характеристика с тем же ограничением.
Насыщение регулировочной характеристики (рис. 9.3,а) определяется полным открытием рабочего окна золотника. Малый наклон характеристик на начальном участке (“ложка”) повышает динамическую устойчивость бустерной системы и обеспечивается профилированием рабочих кромок золотника, имеющих специальные насечки,проточки или лыски (рис. 9.4).
Рис. 9.4
Насечки
Лыски
2.Силовая характеристика – зависимость усилия Fн, развиваемого бустером на выходной точке (или перепада давлений в гидродвигателе Рн), от величины смещения золотника хз при нулевой скорости слежения.
Типовая силовая характеристика бустера показана на рис. 9.5 и отличается явно выраженной зоной нечувствительности (вследствие перекрытия в золотнике рабочих окон).
vп=0
хз
Р2
Р1
Рн(хз)
Р1,Р2,Fн
Рис.9.5
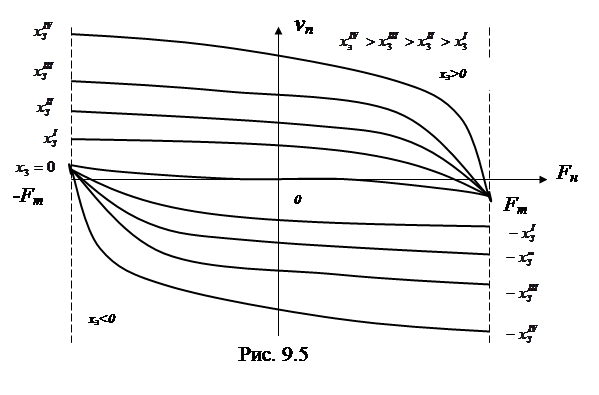
3. Механическая (обобщённая статическая) характеристика бустера – зависимость установившейся скорости движения поршня vп от нагрузки Fн на выходной точке бустера при различных открытиях золотника хз (рис. 9.6).
Fm – максимальное усилие, развиваемое бустером
Данная характеристика соответствует аналогичной характеристики обычного дросселя и имеет вид семейства парабол с некоторым начальным наклоном в зоне хз 0, обусловленным наличием радиального зазора и, следовательно, перетечек в золотниковой паре.
Регулировочная и силовая характеристики могут быть получены из механической как частные случаи.
Структурная схема бустера.
Ранее мы рассматривали дроссельный ГП, у которого входной координатой было перемещение золотника, а выходной – перемещение штока ГД. Рассмотрим бустер, используя рис. 9.1, для чего выделим рычаг АОБ. От проводки у рычага перемещается точка А на величину Ха. Цетром вращения в этом случае является точка Б (позиция 2) на рис.9.6.
А
А
А
Хб
Хо
Хо+Хб
Ха+Хб
Ха
Ха
Б
Б
Б
Б
О
О
О
О
А
Затем точка А закрепляется (её держит лётчик через штурвал) и привод отрабатывает входное воздействие, при этом центром вращения рычага уже является точка А. После окончания переходного процесса и установления золотника в нейтраль точка Б переместится на величину Хб влево, а точка О переместится вправо на на величину Хо. Обратимся к кинематической схеме перемещения рычага. Для рассмотрения соотношений переместим рычаг как показано в позиции 4.
Рассматривая подобные треугольники, получим пропорцию
где а -отрезок АО, аb -отрезок ОБ. Введя k=b/a, получим
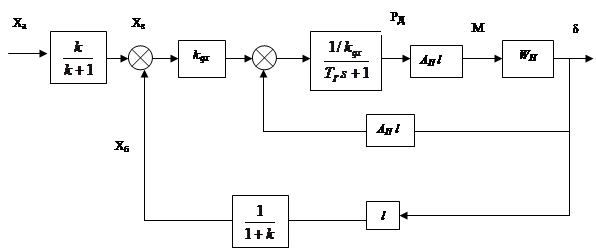
Приведённое уравнение является уравнением рассогласования для гидромеханического привода (бустера). Для описания работы бустера можно пользоваться системой уравнений, рассмотренных при анализе работы дроссельного ГП. Соответстветствующая структурная схема приведена на рис. 9.6. без учёта жёсткости проводки.
Полученная структурная схема отличается от схемы дроссельного привода только наличием множителей, определяемых соотношением плеч рычага АОБ. При учёте жёсткости проводки необходимо учесть упругость и распределённую массу элементов проводки в структурной схеме.
studopedia.su - Студопедия (2013 - 2025) год. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав!Последнее добавление









































































































 направление перемещения совпадает.
направление перемещения совпадает.





















































 Возможные формы регулировочных характеристик показаны на рис. 9.3.
Возможные формы регулировочных характеристик показаны на рис. 9.3.






 2b1 - зона нечувствительности,
2b1 - зона нечувствительности,


























































 Данная характеристика соответствует аналогичной характеристики обычного дросселя и имеет вид семейства парабол с некоторым начальным наклоном в зоне хз 0, обусловленным наличием радиального зазора и, следовательно, перетечек в золотниковой паре.
Данная характеристика соответствует аналогичной характеристики обычного дросселя и имеет вид семейства парабол с некоторым начальным наклоном в зоне хз 0, обусловленным наличием радиального зазора и, следовательно, перетечек в золотниковой паре.