КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 6. Исполнительные механизмы органов управления (рулевые машины)
|
|
|
|
Команда от системы управления в виде непрерывного тока (аналогового сигнала) или последовательности импульсов БЦВМ после преобразовательно-усилительных операций поступает на вход исполнительного механизма (ИМ).
ИМ преобразует, усиливает слаботочный сигнал управления от комплекса командных приборов летательного аппарата или непосредственно от пилота в пропорциональное перемещение или вращение выходного звена (штока, вала) рулевой машины (РМ). Шток, вал через кинематику или непосредственно передают движение органам управления, парируя возмущения или обеспечивая программное управление летательным аппаратом.
Сигнал от СУ приходит на вход электромеханического преобразователя (ЭМП) аналогового или импульсного типов:
А) поляризованного реле,
Б) шагового двигателя.
В ЭМП происходит преобразование величины тока или количества импульсов в пропорциональное движение выходного вала.
На валу ЭМП установлен регулирующий орган гидроусилителя, как правило, следующих видов:
А) дроссель гидроусилителя типа «сопло-заслонка»,
Б) золотник плоский или цилиндрический,
В) струйная трубка.
Гидроусилитель преобразует перемещение регулирующего органа в перепад давления на поршне силового цилиндра ИМ (РМ).
Под действием образовавшегося на поршне перепада давления совершается движение штока (вала). При движении происходит перемещение устройства отрицательной обратной связи (механического или электрического), вырабатывающего сигнал, пропорциональный командному сигналу, который суммируется со входным сигналом, обнуляя последний, и останавливает движение штока, образуя нулевой сигнал рассогласования. Шток (вал) и орган управления останавливаются в положении пропорциональном величине входного сигнала.
Поясним принцип работы РМ на двух схемах ИМ с поступательным и поворотным движением выходного звена.

А - А
Водило




 T
T
А
А
 | |||
 |
В-В
 |
Рвх
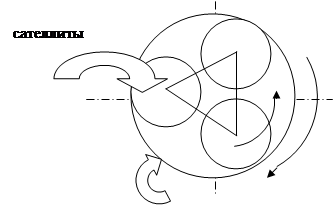
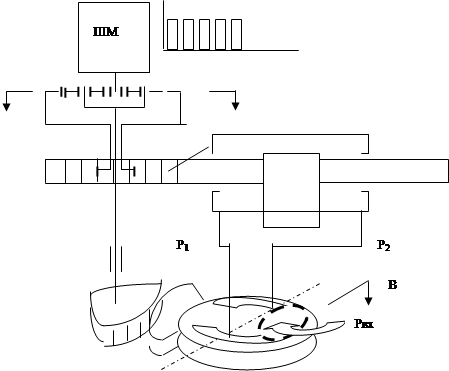
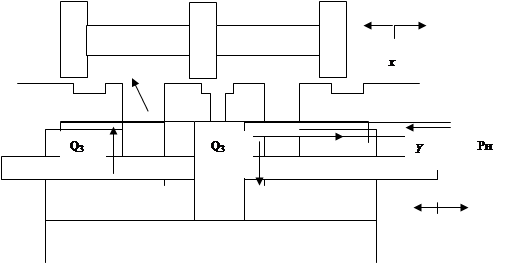
Последовательность импульсов поступает на вход в ШМ. Их число пропорционально углу отклонения летательного аппарата. Выходной вал ШМ поворачивается на угол пропорциональный входному сигналу, а полярность угла поворота определяется порядком коммутации обмоток ШМ. При неподвижной коронной шестерни с помощью сателлитов обеспечивается поворот водила и вместе с ним поворотной части, где выполнены прорези, плоского золотника относительно неподвижного отверстия, к которому подводится рабочая жидкость под давлением. Величину давления формирует источник питания за счёт настройки либо газового клапана в случае использования вытеснительного источника питания либо настройки гидравлического переливного клапана, установленного между магистралями высокого и низкого давлений.
В результате отклонения прорезей относительно отверстия подачи рабочей жидкости в одной из полостей образуется высокое давление, близкое к входному, а в другой – низкое давление, близкое по величине к сливному.
Под действием образовавшегося перепада давления DР=Р1-Р2 на поршне образуется сила  , действующая в сторону, обеспечивающую возврат золотника в среднее положение относительно прорези подачи жидкости от источника питания.
, действующая в сторону, обеспечивающую возврат золотника в среднее положение относительно прорези подачи жидкости от источника питания.
Возврат золотника в исходное положение производится рейкой штока, поворачивающей, при неподвижной шестерни вала ШМ, коронную шестерню, а вместе с нею вращающиеся сателлиты через водило возвращают золотник в исходное положение. При этом поршень останавливается в положении соответствуюшему количеству поданных на ШМ импульсов, а направление движения определяется порядком распределения импульсов по обмоткам ШМ (рис.).
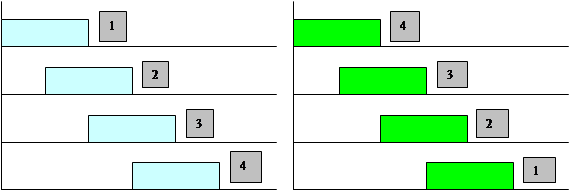
Прямая Обратная
 |
 В рассматриваемой рулевой машине коэффициент передачи от ШМ к золотнику составляет 360°ШД 60°ЗОЛ 25 мм штока.
В рассматриваемой рулевой машине коэффициент передачи от ШМ к золотнику составляет 360°ШД 60°ЗОЛ 25 мм штока.
В поворотной РМ реализована единичная отрицательная обратная связь по положению – угол поворота золотника равен углу поворота выходного вала (рис.).
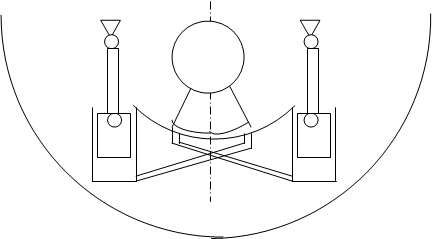 |
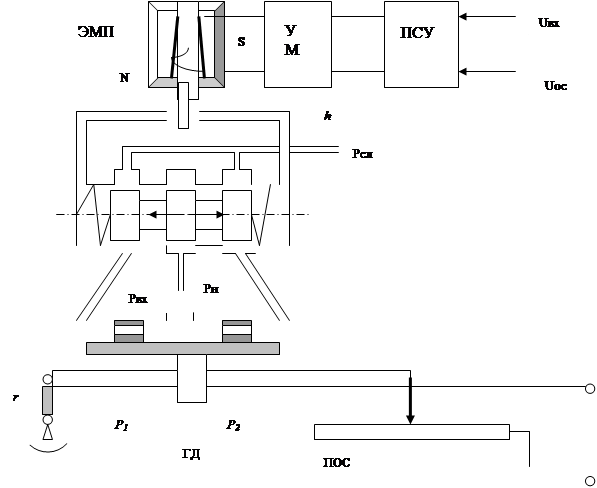
Схема аналоговой РМ с электрической обратной связью.










|
|
|
|
|
|







ГД – гидродвигатель,
ГРУ – гидрораспределитель, распределяет входной поток рабочей жидкости между полостями ГД,
ПСУ – преобразовательно-суммирующее устройство,
ПОС – потенциометр отрицательной обратной связи.
ЭМП – электромеханический преобразователь.
Принцип работы АРМ.
Исходное положение выходных координат элементов: Uвх=0; Uос=0; DU=0; Iу=0, h=0; DР=Р1-Р2=0; У=0; d=0.
При подаче входного сигнала Uвх появляется сигнал ошибки DU= Uвх- Uос, что ведёт к появлению тока управления в обмотках ЭМП Iу=kiDU, что приводит к отклонению заслонки ЭМП h=kэмп Iу.
Перемещение заслонки приводит к перемещению золотника x=kгуh, при этом на поршне образуется разность давлений DР=Р1-Р2, под действием которой происходит движение штока Y, а вместе с ним и органа управления r.
Перемещение подвижной системы происходит до тех пор, пока сигнал отрицательной обратной связи не уравновесит входной сигнал, т.е. DU= Uвх- Uос=0. В этом случае все параметры приходят в исходное, нулевое положение, кроме входного сигнала Uвх, сигнала обратной связи Uос и положения штока У и связанного с ним отклонения выходного вала привода d. При этом будет выполняться условие Y=kпрUвх.
Следует отметить, что это условие справедливо при отсутствии нагрузки на выходном валу привода. При наличии усилия сопротивления нагрузки на выходном валу указанное соответствие будет выполняться с некоторой ошибкой. Величина этой ошибки будет тем больше, чем больше момент сопротивления нагрузки.
Задача описания работы РМ заключается в описании связи перемещения золотника “x” с перемещением штока ГД «Y», т.е. с нахождением зависимости Y=f(x). Представленная ниже расчётная схема существенно облегчает решение этой задачи.
 | |||||
 | |||||
 |
Исходными являются уравнения:
1. Неразрывности расходов через дросселирующие отверстия золотника,
2. Уравнения равновесия сил, приложенных к поршню или равновесия моментов на выходном валу привода.
Расход жидкости через дроссель.
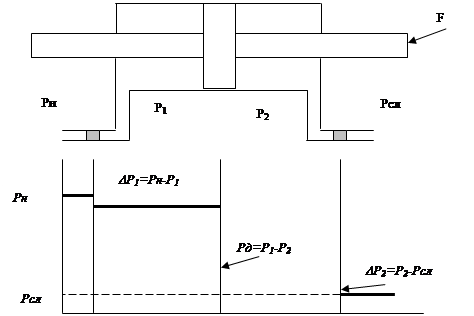 |


DР1=Рн-Р1 – потеря давления на входном дросселе,
Рд=Р1-Р2 – перепад давления, создающий усилие на штоке,
DР2=Р2-Рсл – потеря давления на выходном дросселе.
При допущении, что DР1=DР2=DР выполняется, равенство потерь на дросселях, имеем:

откуда

- это уравнение связывает потери давления на дросселе с перепадом давления на поршне.
Расход через дроссель определяется на основании уравнения Бернулли соотношением:
где:
Нагрузочная характеристика исполнительного механизма.
С учётом знаков перемещения золотника и перепада давления, имеем:
 |
 |
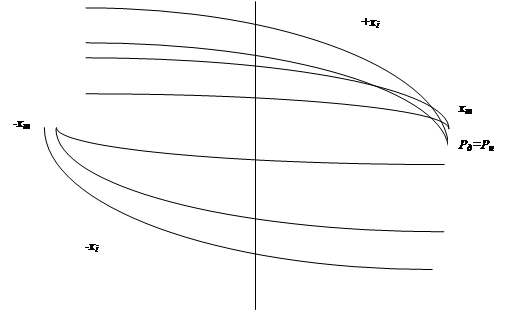
Нагрузочная характеристика показывает, как под действием нагрузки (Рд) меняется расход через золотник. Видно, что при увеличении нагрузки – противодавления со стороны ГД расход уменьшается и может вовсе стать равным нулю, когда Рд=Рн.
Частным случаем нагрузочной характеристики является силовая и расходная характеристики – статические характеристики ГУ.
Расходная характеристика – зависимость расхода через золотник от перемещения золотника при нагрузке равной нулю Рд =0. Эту характеристику также называют характеристикой холостого хода. Полагая Рд =0, получим:
 |
kЗ – чувствительность золотника по расходу.
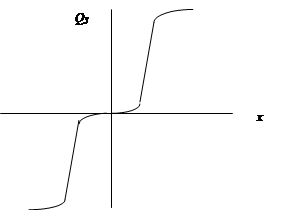 |
Расходная характеристика определяет скорость перемещения поршня ГД при отсутствии нагрузки на штоке в режиме холостого хода, поскольку
 |
где
АП – эффективная площадь поршня.
Силовая характеристика.
Силовой характеристикой называют зависимость перепада давления Рд на поршне от положения золотника при QЗ=0:
Рд=РнSignx
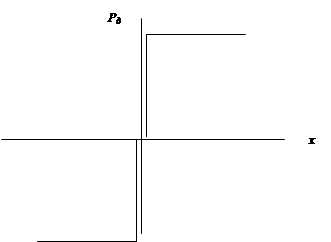 |
График силовой характеристики показывает, что перепад давления на поршне меняется практически скачком при изменении знака перемещения золотника.
ЛЕКЦИЯ 7. Уравнение движения линеаризованного дроссельного гидравлического привода.
Для составления дифференциальных уравнений движения ДГП используем линеаризованную расходную характеристику по двум переменным параметрам «х» и «Рд»:

где:
kqx, kqP – частные производные расхода QЗ по соответствующим переменным параметрам, вычисленным в точке x=0; QЗ=0.
Уравнения движения линеаризованного ДГП основываются на двух постулатах:
- балансе расходов жидкости,
- балансе моментов на валу (штоке) привода.
Расход в золотнике идёт на компенсацию расхода пропорционального скорости поршня Qд и расхода, идущего на компенсацию сжимаемости жидкости за вычетом расхода утечек Qут=rPд:
 |
Скорость поршня связана с расходом:
 |
Уравнение баланса расхода:

где:
VТР - объём соединительных каналов между ГР и ГД.
Для каждой из ветвей гидроусилителя:
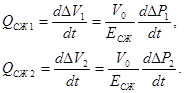
Учитывая, что Рд=Р1-Р2, можно записать:

Тогда уравнение расходов примет вид:
 |
Уравнение сил или моментов имеет вид:
 |

где:
kШ -коэффициент шарнирного момента,
АП -эффективная площадь поршня,
l -длина рычага кинематической передачи от штока к органу управления,
МТ -амплитудное значение момента трения.
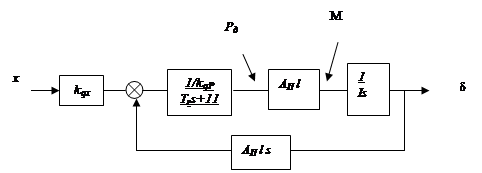
Линеаризованная структурная схема привода имеет вид:
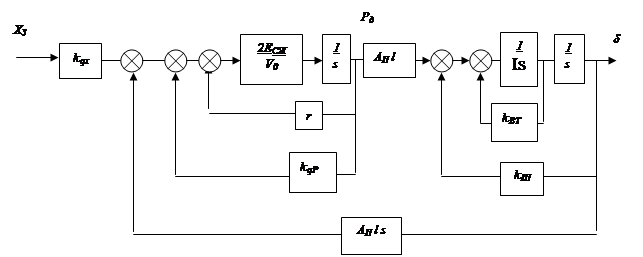

После преобразований структурная схема ДГП имеет вид:
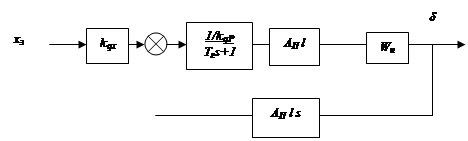
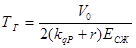 |
Где:
постоянная времени темпа нарастания перепада давления Рд в полости силового цилиндра ГД.
Структурная схема силового ДГП при kШ=0 и kВТ=0.
Представленный случай предполагает наличие в составе нагрузок только инерционную составляющую, характерную для управления положением маршевого двигателя или поворотного сопла, имеющих достаточно большую массу.
Сворачивая внутренний контур, получим передаточную функцию внутреннего контура:
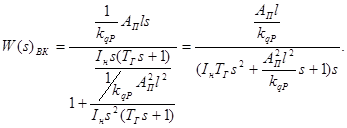 |
В полученном выражении разделим числитель и знаменатель на

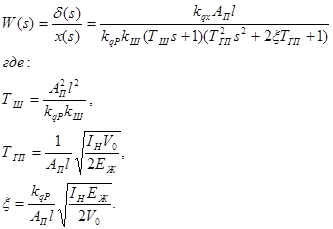
В итоге, получим передаточную функцию ДГП W(s)=kqPWВК(s), приведённую ниже, в которой постоянная времени TM=IHkqP/(Aпl)
 |
ТМ – характеризует темп нарастания скорости штока.
Обозначим
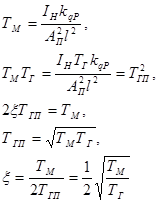
С учётом полученных соотношений, передаточная функция ДГП примет вид
 |
Привод обладает астатизмом первого порядка, т.е. не имеет ошибки по положению.
Структурная схема силового ДГП в общем случае.
В общем случае нагружения, когда kш, kВТ, IH¹0, частотные характеристики и передаточную функцию ДГП можно получить на основании анализа логарифмических амплитудно-частотных характеристик (ЛАЧХ) ДГП.
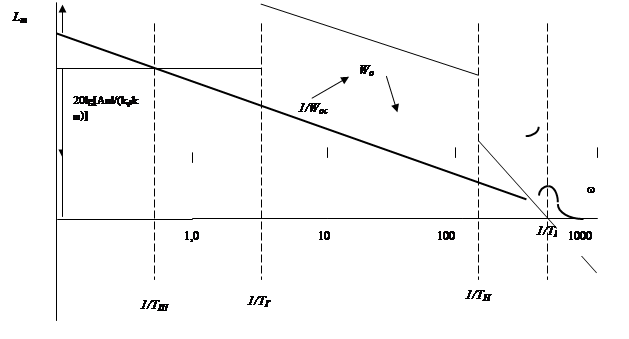 |
Передаточная функция ДГП при нагружении полного комплекса составляющих примет вид
Сравнивая эту передаточную функцию с передаточной функцией при kШ=0, видим, что появление в нагрузке шарнирного момента приводит к потере приводом астатизма и появлении в приводе при отработке командного сигнала ошибки по положению штока (вала).
Основные технические характеристики привода.
При эксплуатации ДГП оперируют основными техническими характеристиками:
- максимальный момент на валу привода Мм, Нм,
- максимальная скорость выходного вала Wm, 1/c,
- максимальный расход жидкости Qн, л/с,
- максимальная мощность привода Nm, Вт,
- давление питания привода Рн, МПа,
- максимальное перемещение штока Ymax, м,
- время работы t, c.
Элементы управления электрогидравлического привода.
В состав элементов управления приводом входят:
-усилитель мощности (УМ),
-электромеханический преобразователь (ЭМП),
-гидроусилитель (ГУ).
Усилитель мощности.
УМ в контуре привода выполняет следующие функции:
-суммирование сигналов управления, по крайней мере двух (Uвх и Uос),
-усиление сигнала управления в заданное число kу раз для необходимого превышения полезного сигнала над шумом и обеспечения запаса устойчивости контура привода,
-согласования электронной части привода со входом ЭМП.
В качестве УМ в настоящее время применяются операционные усилители мощности, т.е. операционные усилители имеющие достаточно мощный выход, порядка 1…4 Вт. Суммирование входных сигналов в этом случае происходит на входных сопротивлениях с различными регулируемыми коэффициентами усиления. После суммирования внутри усилителя формируется сигнал ошибки
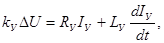 |
В УМ сигнал ошибки усиливается в kу раз. При этом выходной сигнал по времени запаздывает относительно входного на время постоянной времени обмотки управления ЭМП, содержащей активное и индуктивное сопротивления. Для выходной цепи УМ на основании закона Ома можно записать:
откуда получается выражение для передаточной функции УМ:
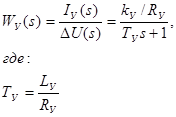
На основании полученной передаточной функции структурная схема УМ имеет вид:
 |
Постоянная времени УМ ТУ характеризует динамику изменения параметров усилителя. Введением обратной связи по току величину постоянной времени можно существенно уменьшить. На начальных этапах проектирования постоянной времени усилителя можно пренебречь.
Следует отметить, что УМ является основным элементом, позволяющим наиболее просто изменять коэффициент усиления контура привода, обеспечивая заданную устойчивость привода или улучшение качества регулирования.
Электромеханический преобразователь.
ЭМП служит для преобразования электрических сигналов в пропорциональное механическое перемещение управляющего органа, коммутирующего поток жидкости гидроусилителя между приёмными каналами силового исполнительного механизма. Эту функцию выполняет маломощный моментный мотор (поляризованное электромеханическое реле) в аналоговых приводах или шаговый двигатель в дискретных приводах.
ЭМП состоит из якоря, магнитной цепи, постоянного магнита для обеспечения постоянной ориентировки якоря и обмоток управления, где создаётся управляемый магнитный поток, взаимодействующий с магнитным потоком постоянного магнита и обеспечивающий перемещение якоря в заданном направлении и на заданную величину.
|
|






|
|
|
|

















На схеме обозначено: 1-якорь ЭМП, 2-статор, 3-упругий элемент, 4-постоянный магнит, 5-заслонка, kУDU -напряжение, приложенное к обмоткам ЭМП, IУ -ток в обмотках ЭМП.
Входным управляющим сигналом для ЭМП является ток IУ управления в обмотках ЭМП. Выходным параметром является перемещение торца якоря h, т.е. статическая зависимость для ЭМП будет h=f(IУ). При появлении в обмотке управления тока IУ за счёт взаимодействия магнитных потоков в якоре ЭМП возникает момент
|

 |
где kM – коэффициент пропорциональности. Движущий момент уравновешивается противодействующими моментами, которые имеют следующий состав:
 |
где IЭ -момент инерции подвижных частей ЭМП относительно центра вращения органа управления ЭМП, kЭ -коэффициент вязкого трения в подвижной системе ЭМП, сЭ -жёсткость пружины ЭМП, a -угол отклонения якоря ЭМП. Угол отклонения якоря ЭМП связан с перемещением заслонки h через величину рычага (длину трубки упругого элемента ЭМП). Если к приведённуму уравнению движения якоря ЭМП применить преобразование Лапласа при нулевых начальных условиях, то можно написать уравнение ЭМП в операторной форме:
 |
откуда, после несложных преобразований, можно получить передаточную функцию и структурную схему
 |
где постоянная времени ЭМП определяется соотношением:

коэффициент демпфирования равен:

а коэффициент передачи ЭМП:
 |
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 866; Нарушение авторских прав?; Мы поможем в написании вашей работы!